

Part grasping detection algorithm based on Mask R-CNN
-
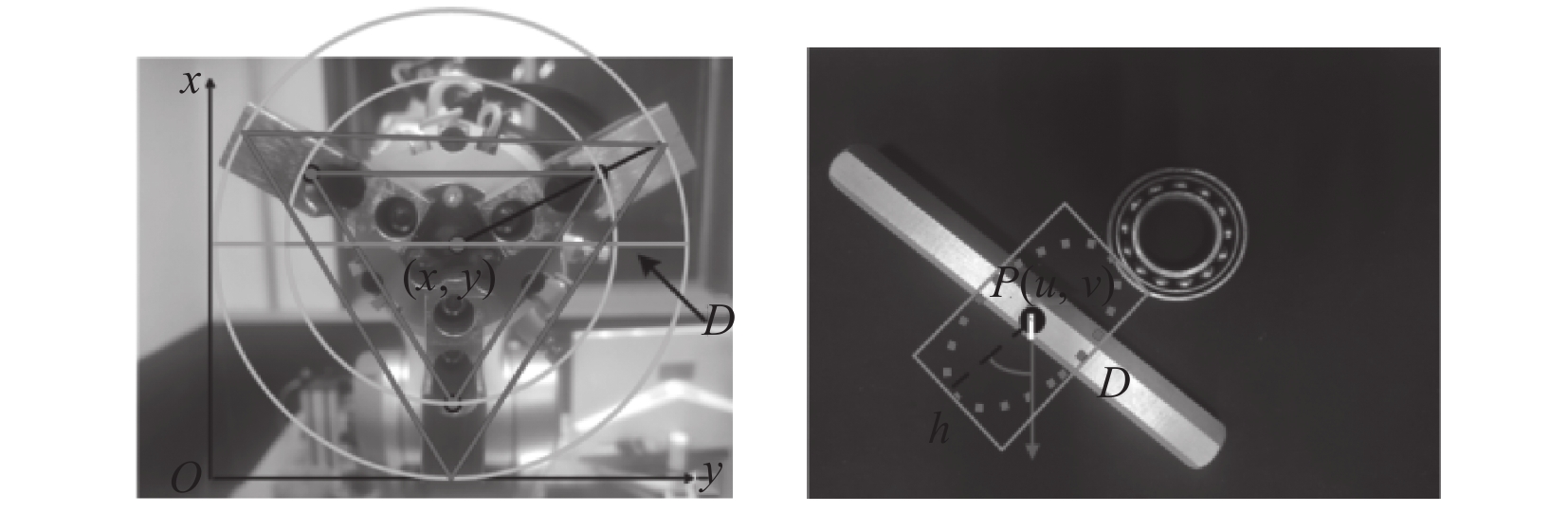
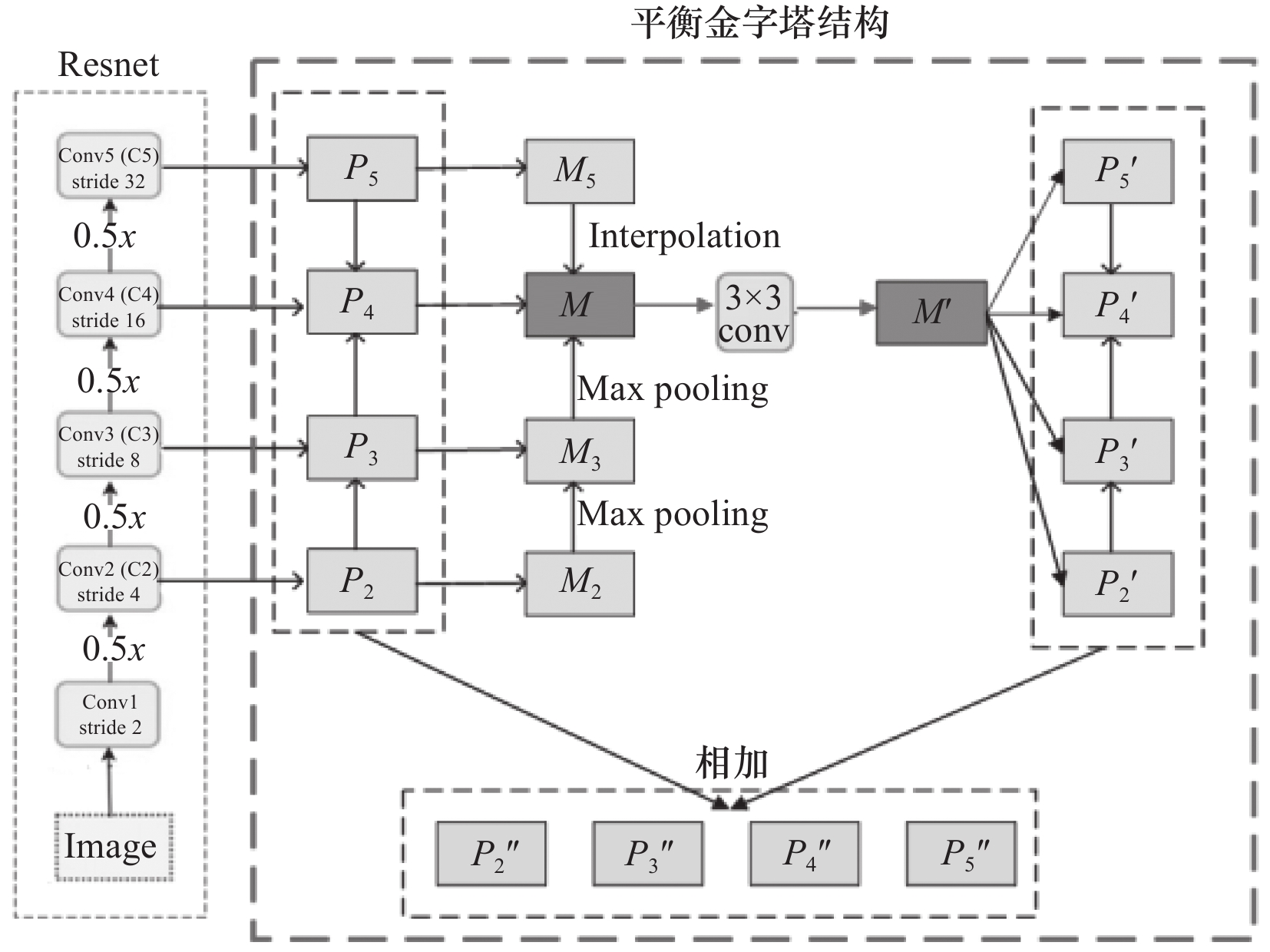
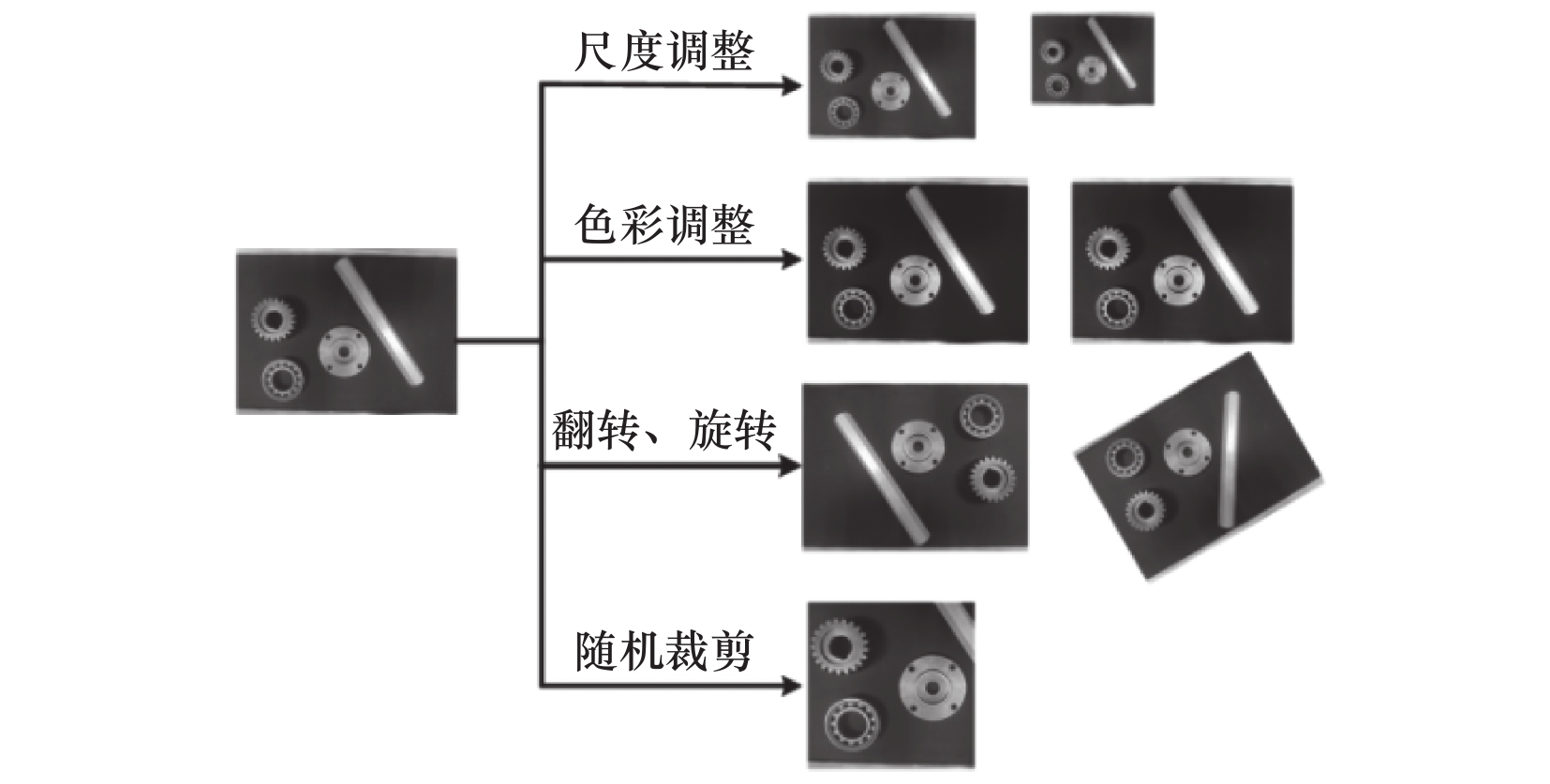
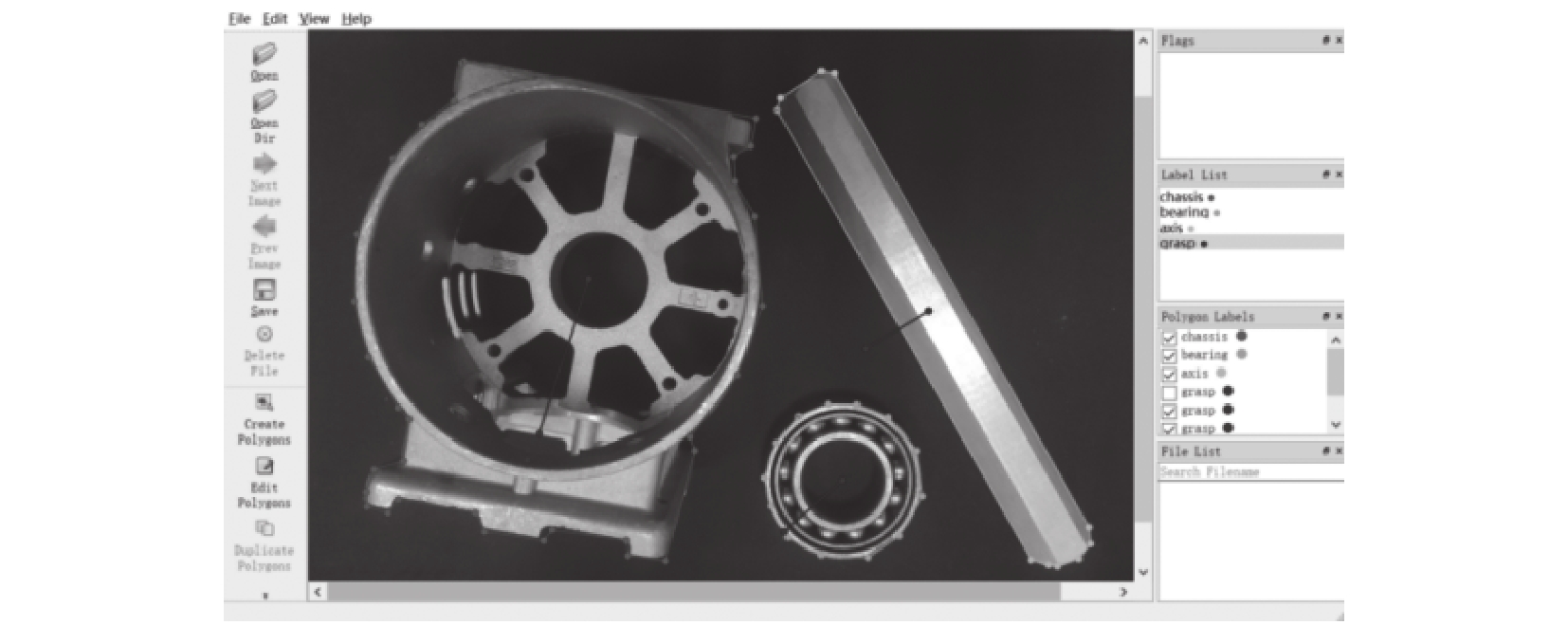
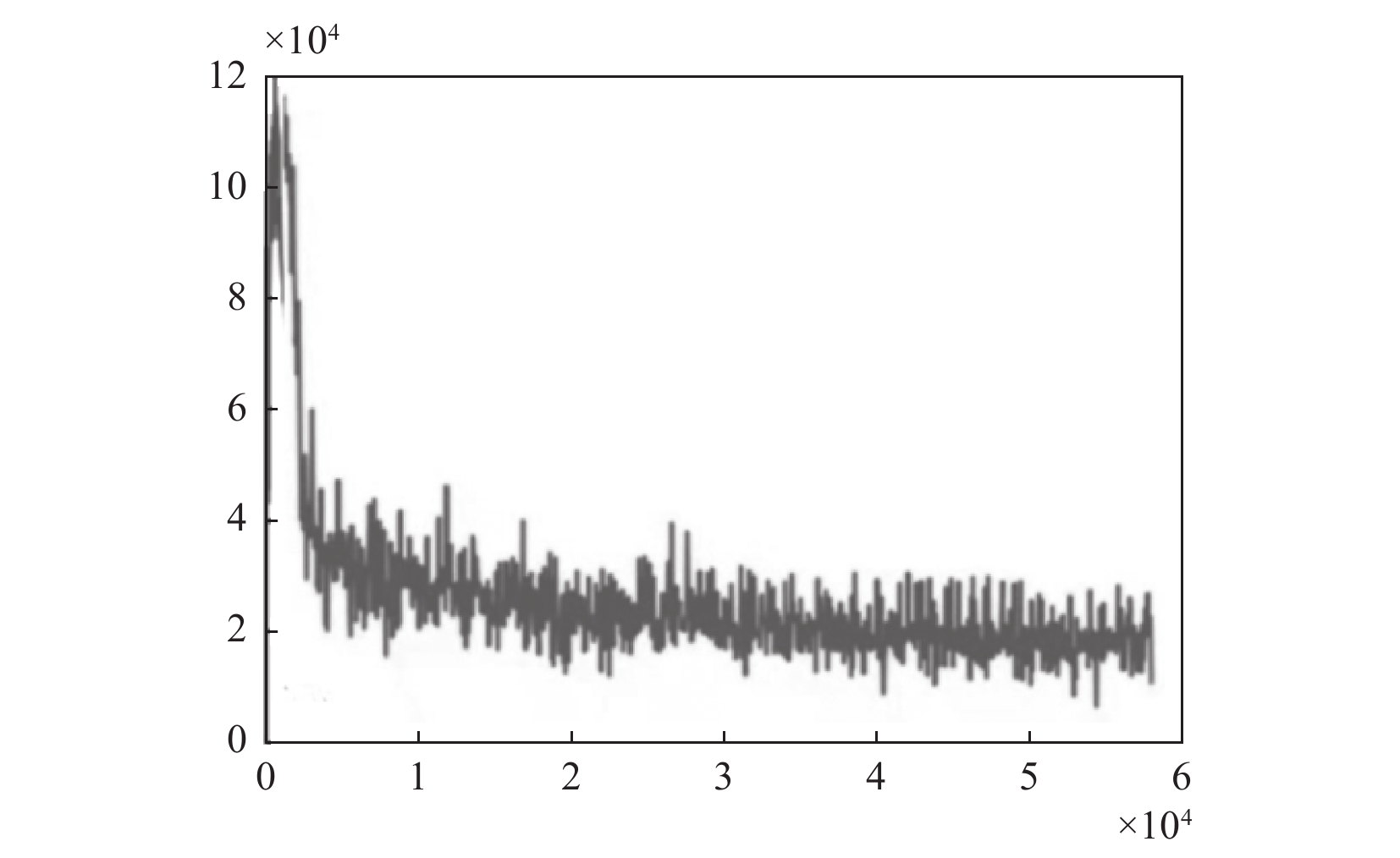
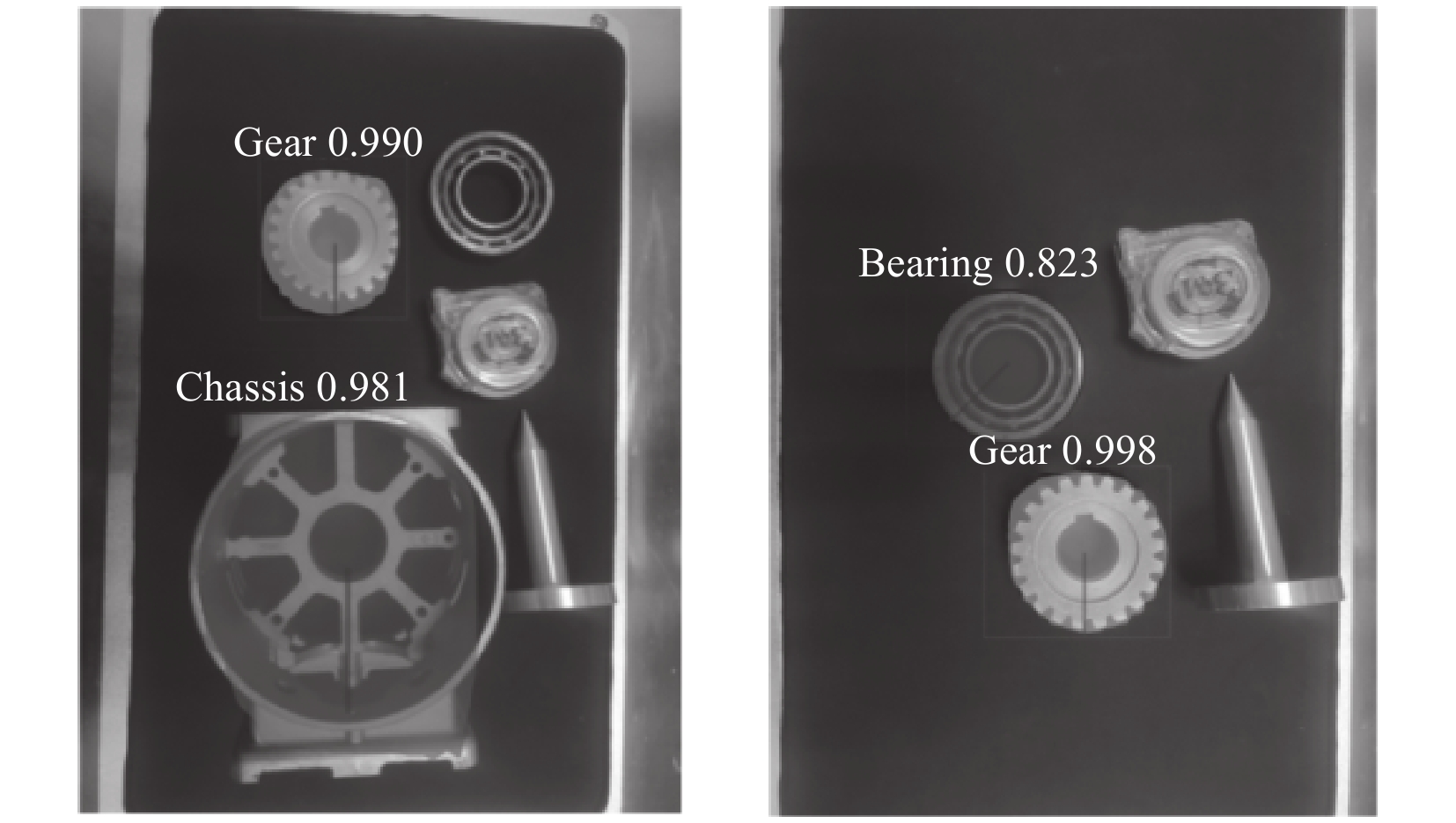
摘要: 针对工业中存在的散乱堆叠零件抓取回收困难的问题,提出了一种基于Mask R-CNN的改进目标检测算法。首先通过在特征提取网络中融入平衡特征金字塔思想,改进了损失函数并在网络模型的输出层增加抓取角度预测分支,结合深度相机参数化表示零件抓取问题,最后通过该方法建立数据集进行了网络训练实现了对机器人目标检测方法的优化,验证了该算法的可行性。Abstract: Aiming at the difficulty of grabbing and recycling scattered stacked parts in the industry, this paper proposes an improved target detection algorithm based on Mask R-CNN. First, by integrating the idea of balanced feature pyramid into the feature extraction network, the loss function is improved and the grasping angle prediction branch is added to the output layer of the network model, Parameterized representation of parts grasping problem combined with depth camera, Finally, the data set is established by this method for network training to realize the optimization of the robot target detection method, which verifies the feasibility of the algorithm.
-
Key words:
- target detection /
- feature extraction network /
- pyramid network
-
表 1 实验配置
配置名称 配置型号 CPU Intel®CoreTMi7-8700 GPU NVIDIA GeForce GTX 1070 操作系统 Windows 10 深度学习框架 Tensorflow  下载: 导出CSV
下载: 导出CSV
-
[1] 魏坤. 机械臂混杂场景动态路径规划与多目标识别研究[D]. 哈尔滨: 哈尔滨工业大学, 2019. [2] 曹文武. 基于RGB-D视觉识别的机器人抓取规划研究[D]. 哈尔滨: 哈尔滨工业大学, 2018. [3] Redmon J, Angelova A. Real-time grasp detection using convolutional neural networks[J]. IEEE International Conference on Robotics and Automation (ICRA), 2015: 1316-1322. [4] 侯俊杰. 深度学习目标检测算法中不平衡问题的研究[D]. 秦皇岛: 燕山大学, 2021. [5] Zheng Z H, Wang P , Liu W , et al. Distance-IoU loss: faster and better learning for bounding box regression[C]. AAAI Conference on Artificial Intelligence, 2020, 34(7): 12993-13000. [6] Redmon J, Farhadi A. YOLOv3: an incremental improvement[J]. 2015 IEEE International Conference on Robotics and Automation (ICRA), 2015: 1316-1322. [7] 孙晓璇, 张磊, 李健. 目标检测数据集半自动生成技术研究[J]. 计算机系统应用, 2019, 28(10): 8-14. doi: 10.15888/j.cnki.csa.007101 [8] 吴睿曦, 肖秦琨. 基于深度网络和数据增强的多物体图像识别[J]. 国外电子测量技术, 2019, 38(5): 86-90. doi: 10.19652/j.cnki.femt.1801314 [9] 王保敏, 王睿, 阮进军, 等. 基于TensorFlow的深度神经网络优化方法研究[J]. 兰州文理学院学报:自然科学版, 2021, 35(6): 71-74,94. [10] 王功鹏, 段萌, 牛常勇. 基于卷积神经网络的随机梯度下降算法[J]. 计算机工程与设计, 2018, 39(2): 441-445,462. doi: 10.16208/j.issn1000-7024.2018.02.026 -

 下载:
下载:






 点击查看大图
点击查看大图

图(14) / 表(2)
计量
- 文章访问数: 60
- HTML全文浏览量: 10
- PDF下载量: 15
- 被引次数: 0


