

Rolling bearing fault diagnosis based on depth feature extraction and domain-adversarial training of neural networks
-
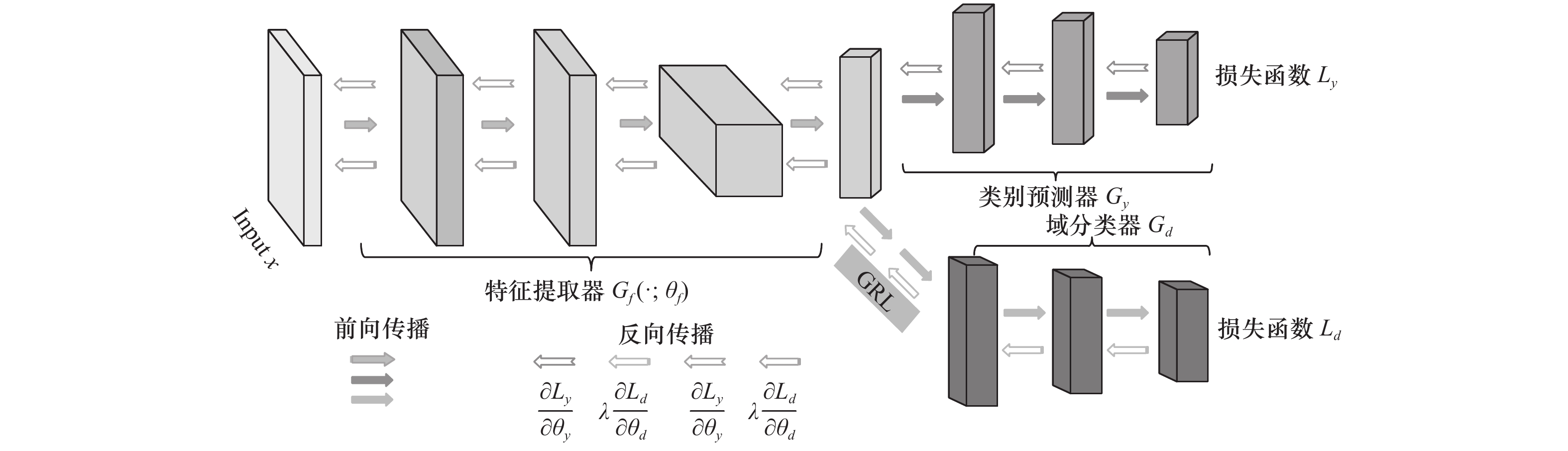
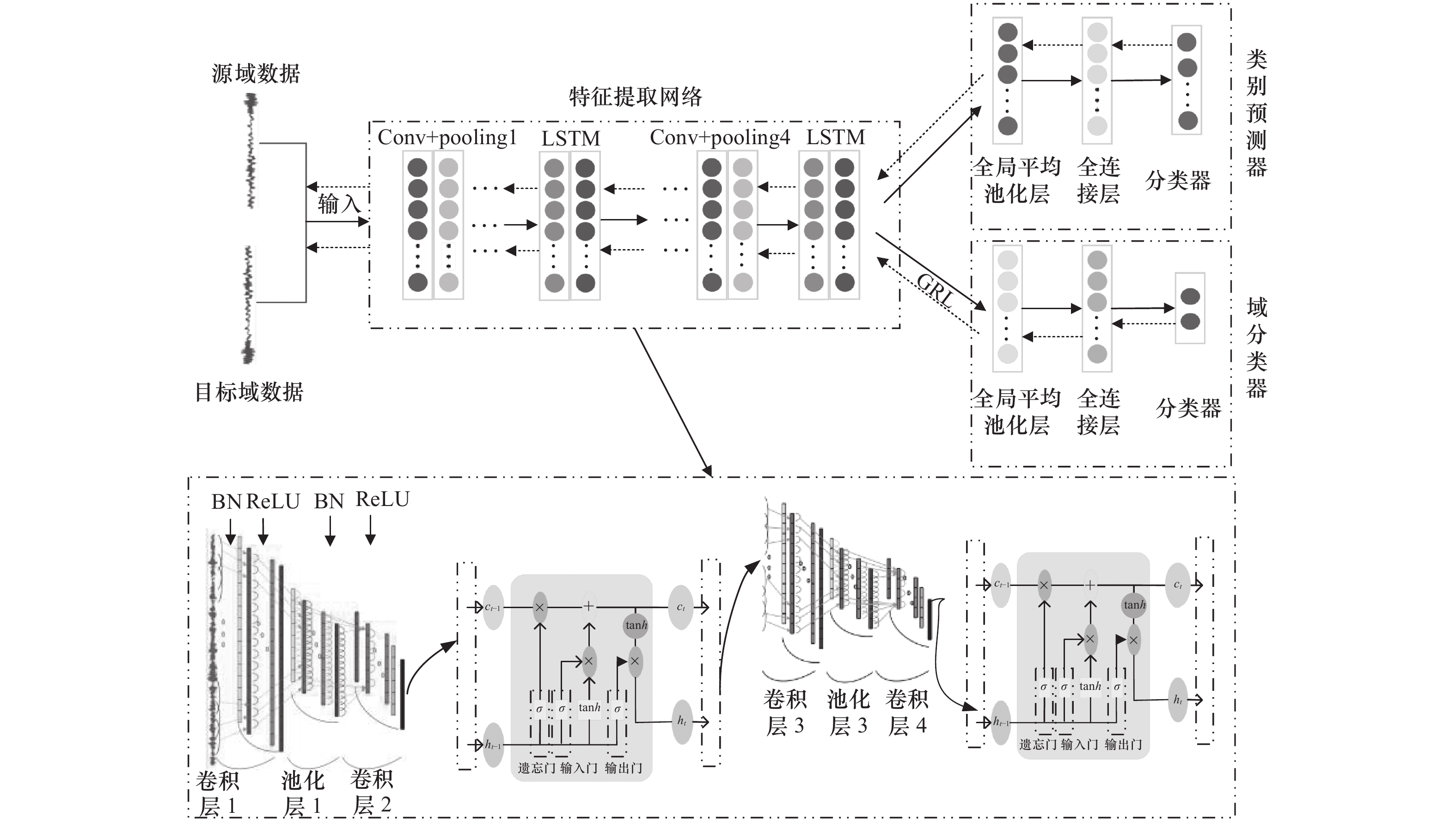
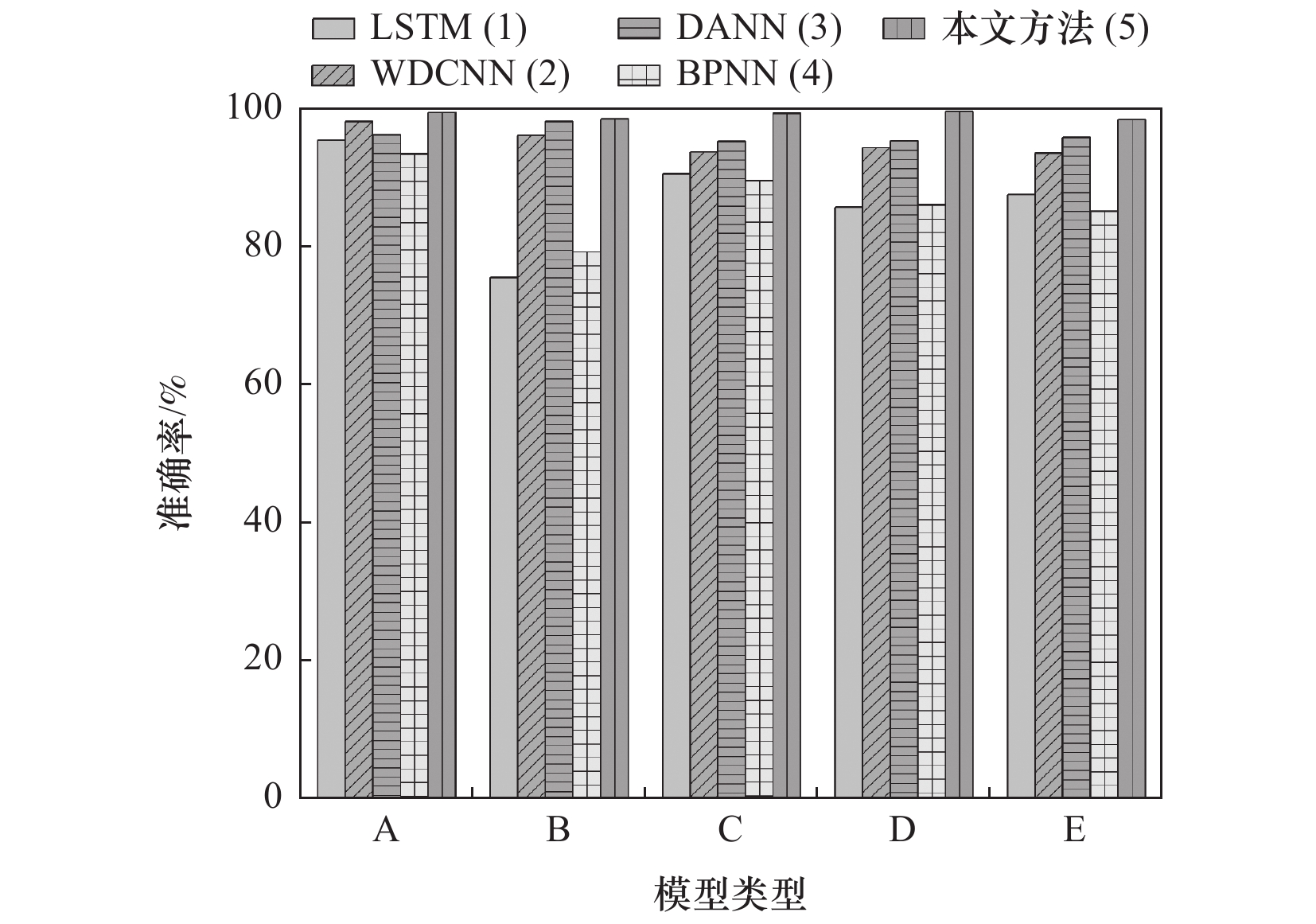
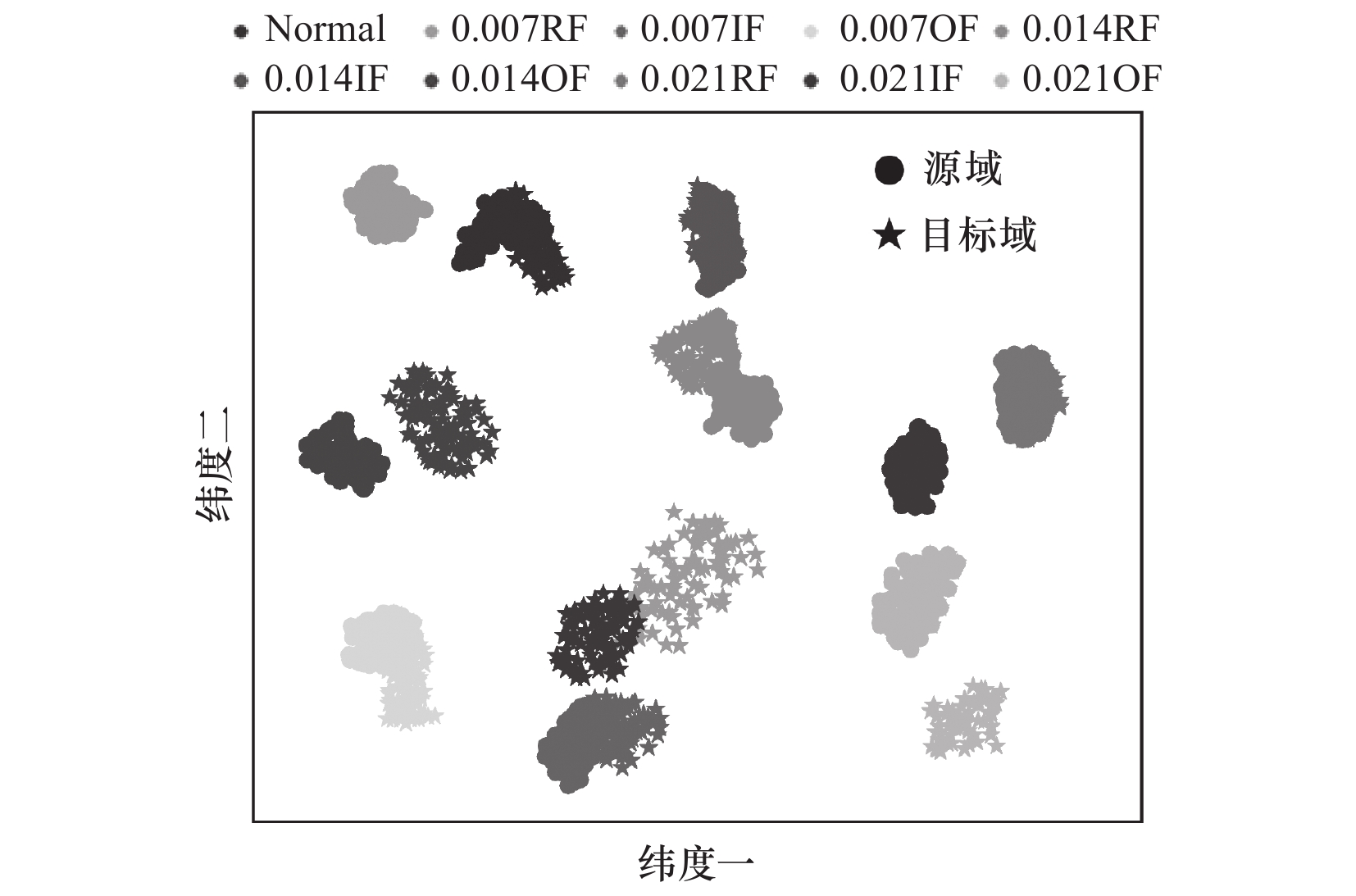
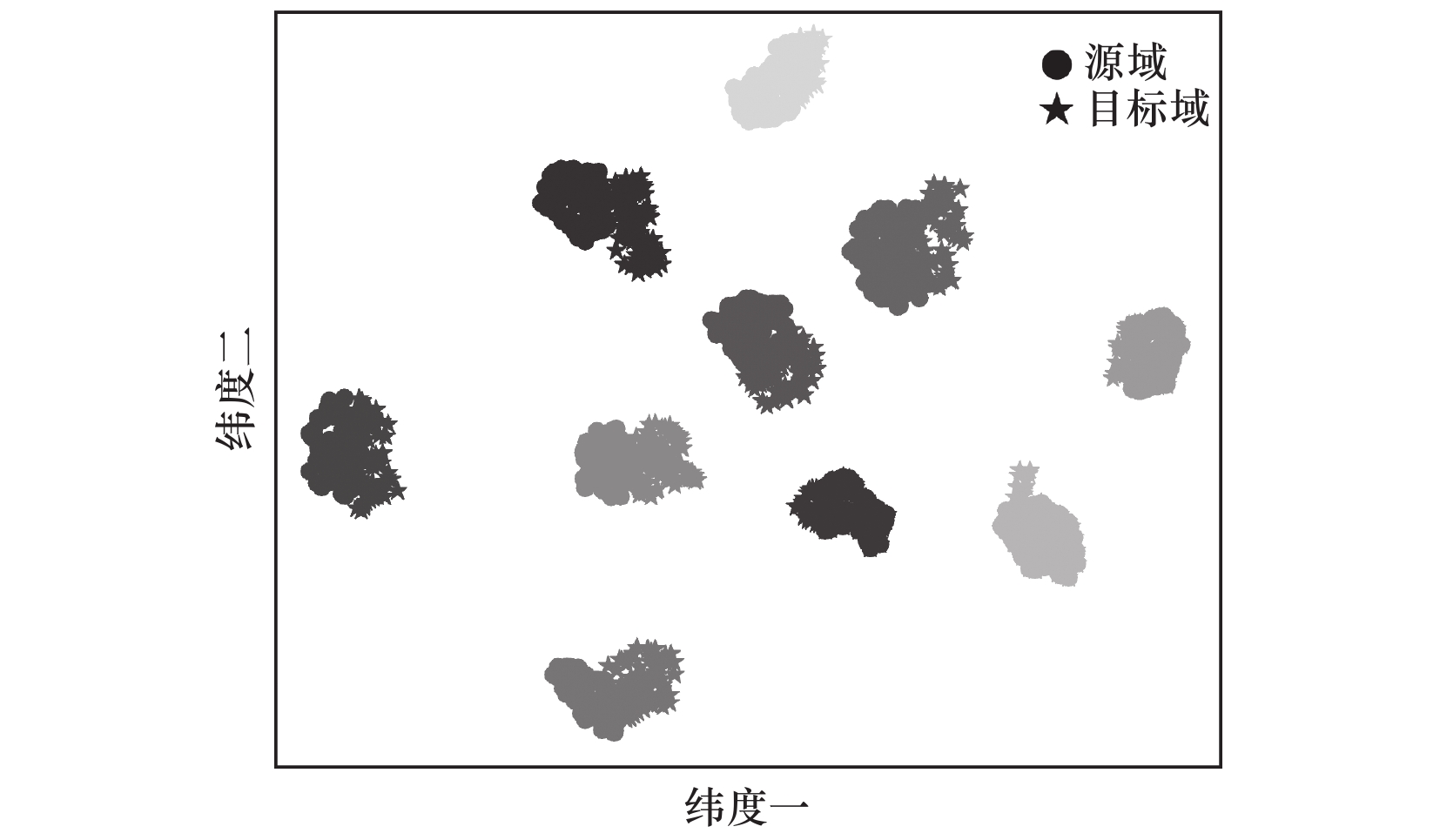
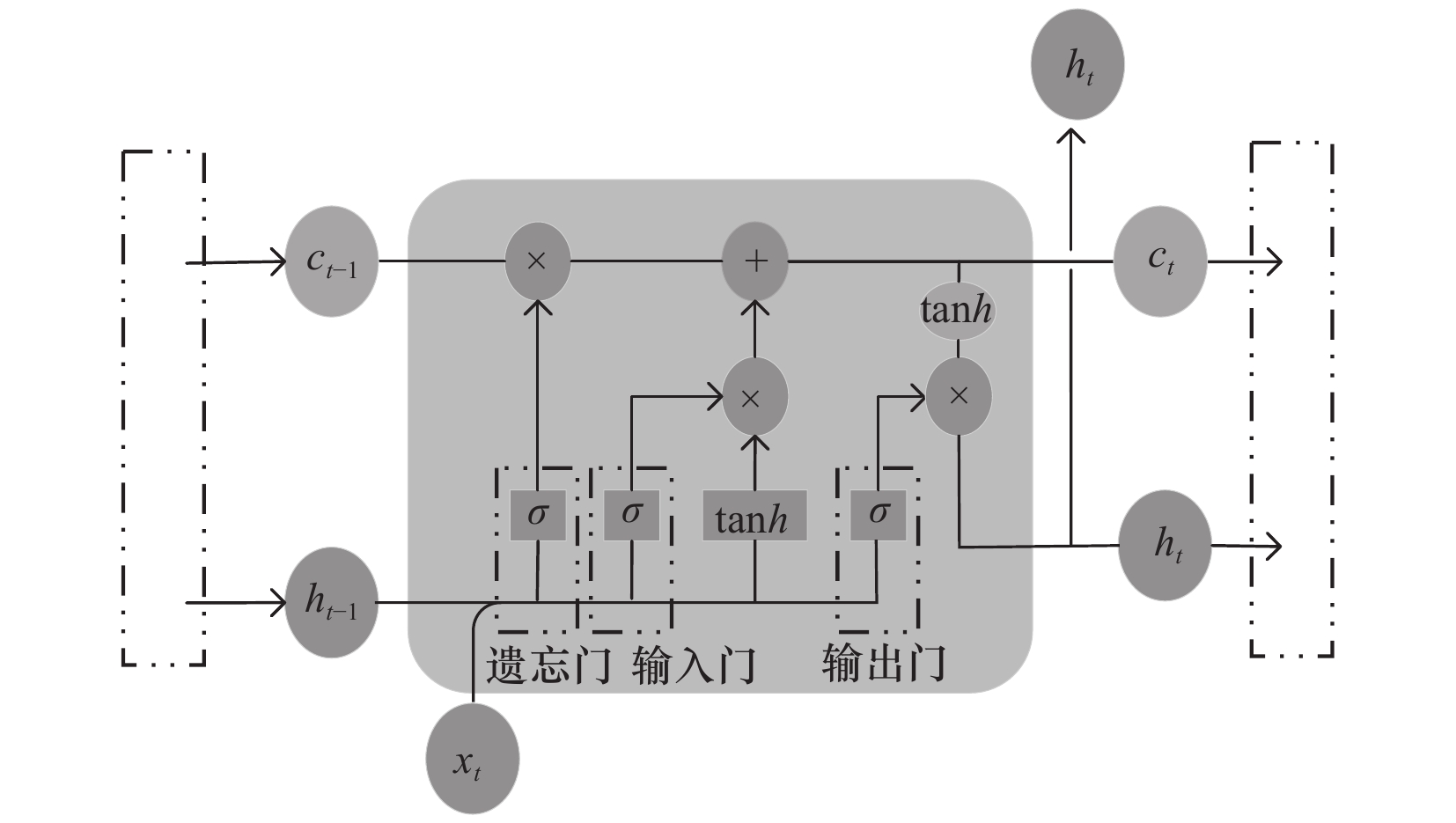
摘要: 实现轴承的智能化诊断是实现旋转设备的智能化诊断的关键。在轴承故障诊断实际情况中存在特征提取不完全、变工况情况下传统的诊断方法效率低的问题。针对这个问题,提出了一种组合方法。在该方法中使用具有宽卷积核的卷积神经网络与长短时记忆网络组合的深度特征提取网络对原始的振动信号进行深层次的特征提取,其次以对抗域适应网络实现源域与目标域间的知识迁移,解决了变工况情况下的跨域诊断能力不理想的问题。并对所提方法进行了验证,实验结果表明,所提方法能够有效地实现对轴承振动信号的深度提取以及识别变工况情况下的轴承故障类型,提高了跨域诊能力。Abstract: Intelligent diagnosis of bearings is the key to the intelligent diagnosis of rotating equipment. Actual bearing fault diagnosis is exposed to problems such as incomplete feature extraction and low efficiency of traditional diagnosis methods under variable working conditions. To solve these problems, a combination method is hereby proposed, and deep-level features of the original vibration signal are extracted using a deep feature extraction network combining a convolutional neural network with a wide convolution kernel and a long-term and short-term memory network. Besides, the knowledge transfer between the source domain and the target domain is realized by a domain-adversarial training of the neural network, which solves the problem of the unfavorable cross-domain diagnosis ability under variable conditions. The hereby proposed method is correspondingly verified, and the experimental results show that the proposed method can effectively extract the bearing vibration signals and identify the bearing fault types under variable working conditions, and improve the cross-domain diagnosis ability.
-
表 1 网络结构参数
编号 网络层 核大小/步长 卷积核数目 1 卷积1 64$ \times $1/16 16 2 池化1 2$ \times $1/2 16 3 卷积2 3$ \times $1/1 32 4 池化2 2$ \times $1/2 32 5 卷积3 3$ \times $1/1 64 6 池化3 2$ \times $1/2 64 7 卷积4 3$ \times $1/1 64 8 池化4 2$ \times $1/2 64  下载: 导出CSV
下载: 导出CSV
表 2 特征提取网络结构参数
编号 网络层 核大小/步长 卷积核数目 1 卷积1 64$ \times $1/16 16 2 池化1 2$ \times $1/2 16 3 卷积2 3$ \times $1/1 32 4 池化2 2$ \times $1/2 32 5 LSTM Units=16 6 卷积3 3$ \times $1/1 64 7 池化3 2$ \times $1/2 64 8 卷积4 3$ \times $1/1 64 9 池化4 2$ \times $1/2 64 10 LSTM Units=16
下载: 导出CSV
-
[1] Hoang D T, Kang H J. A survey on deep learning based bearing fault diagnosis[J]. Neurocomputing, 2019, 335: 327-335. doi: 10.1016/j.neucom.2018.06.078 [2] Lei Y G, Yang B, Jiang X W, et al. Applications of machine learning to machine fault diagnosis: a review and roadmap[J]. Mech. Syst. Sig. Process., 2020, 138: 106587. doi: 10.1016/j.ymssp.2019.106587 [3] 宋霖. 基于CNN的滚动轴承故障诊断方法的研究[D]. 无锡: 江南大学, 2021. [4] Tzeng E, Hoffman J, Zhang N, et al. Deep domain co-nfusion: maximizing for domain invariance [EB/OL]. (2014-12-10). https://arxiv.org/pdf/1412.3474.pdf. [5] Sun B, Saenko K. Deep CORAL: correlation alignment for deep domain adaptation[J]. Computer Vision – ECCV 2016 Workshops: 443–450. [6] Wu Y C, Zhao R Z, Ma H R, et al. Adversarial domain adaptation convolutional neural network for intelligent recognition of bearing faults[J]. Measurement, 2022, 195: 1111501-11115014. [7] Yaroslav G, Evgeniya U, Hana A, et al. Domain-adversarial training of neural networks[J]. Journal of Machine Learning Research, 2015: abs/1505.07818. [8] 张伟. 基于卷积神经网络的轴承故障诊断算法研究[D]. 哈尔滨: 哈尔滨工业大学, 2017. -

 下载:
下载:

 点击查看大图
点击查看大图
图(8) / 表(5)
计量
- 文章访问数: 457
- HTML全文浏览量: 49
- PDF下载量: 91
- 被引次数: 0


