

Collaborative calibration of dual mobile robots based on monocular vision
-
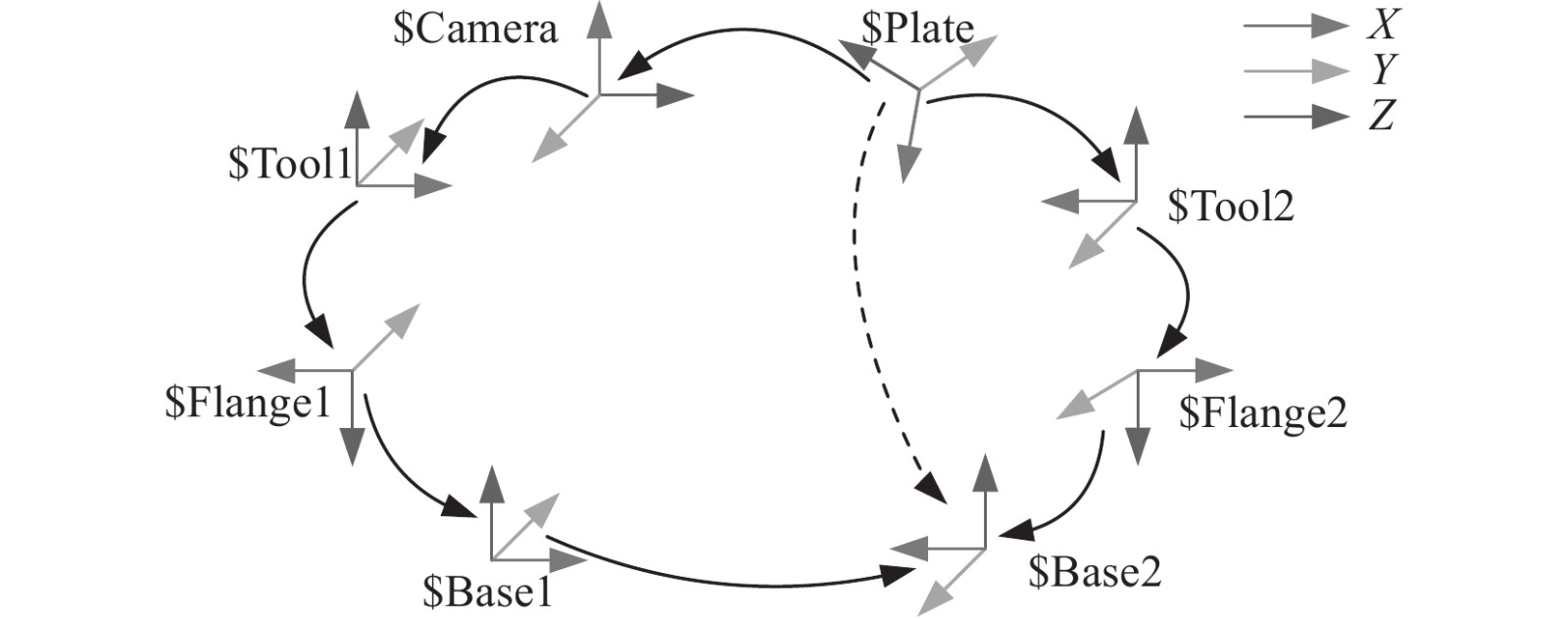
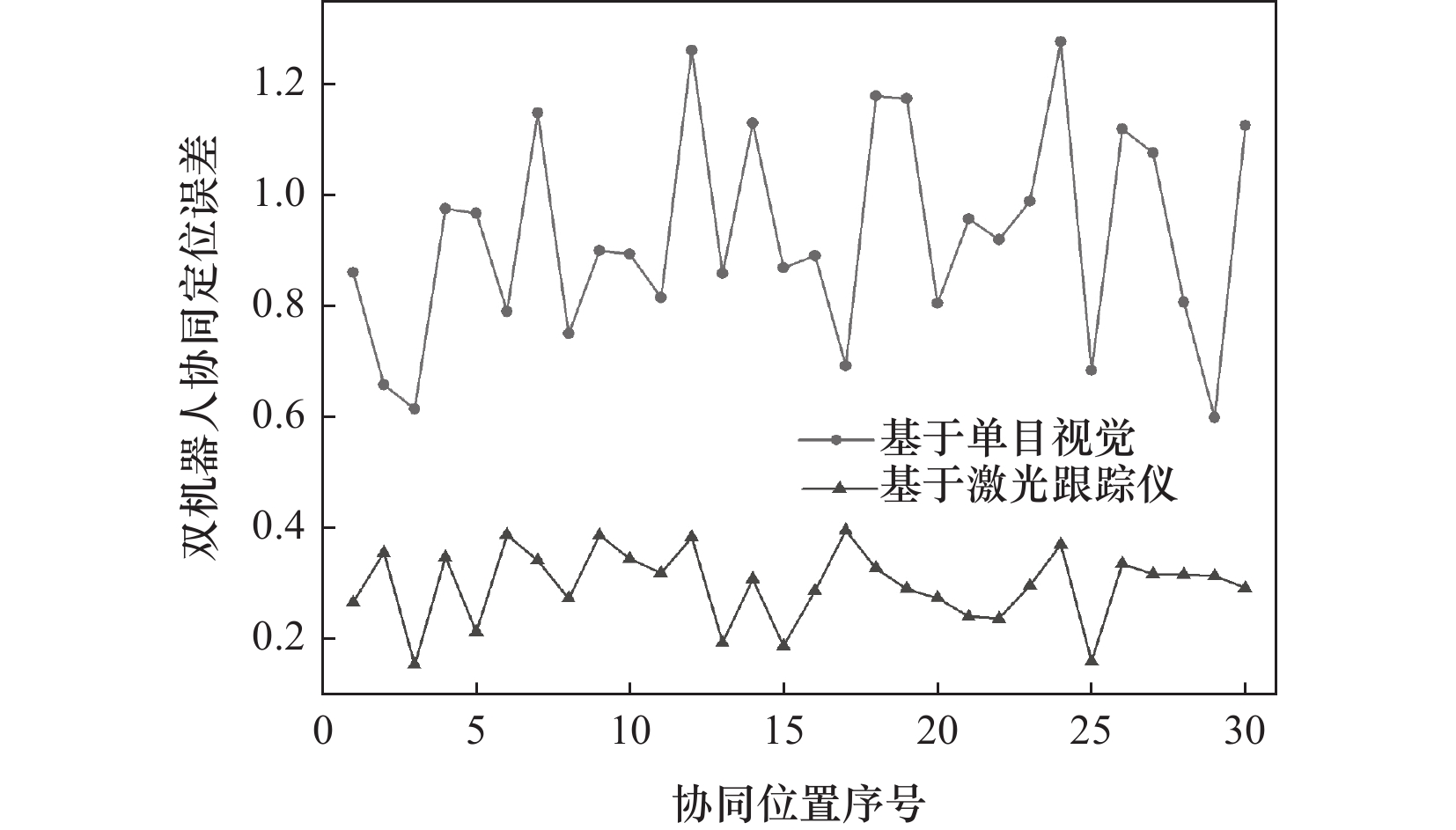
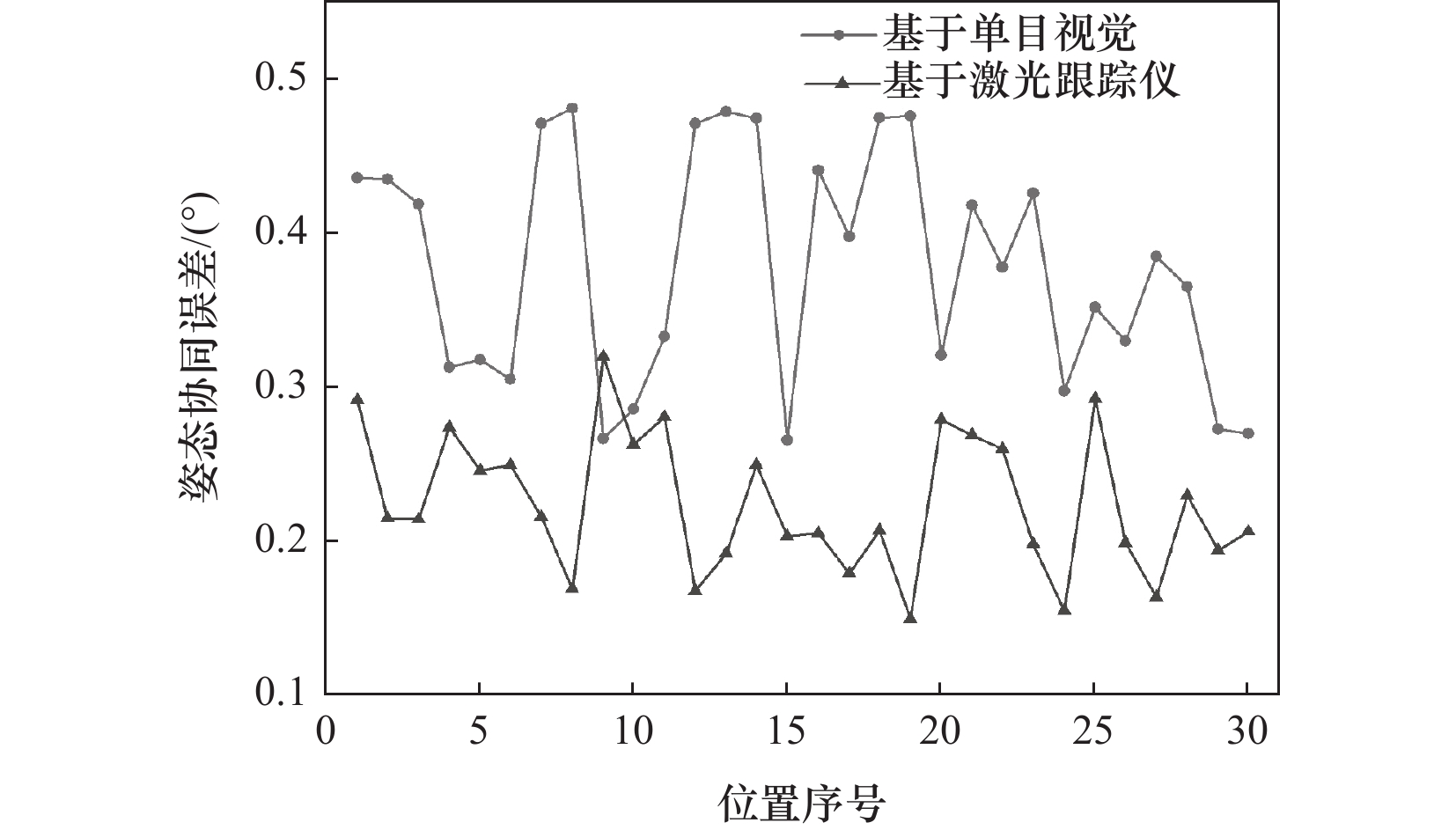
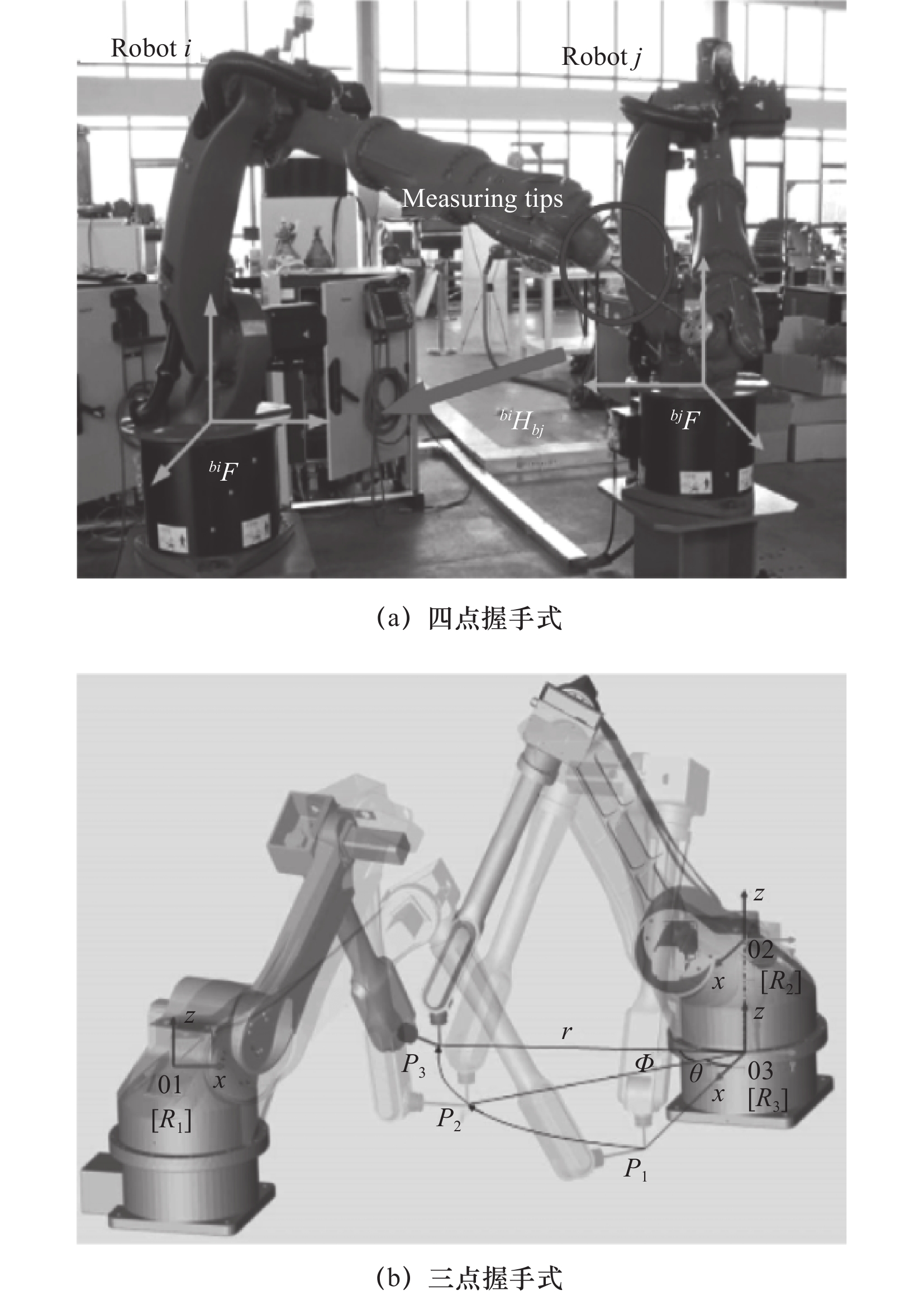
摘要: 由于机器人的基坐标系隐藏在底座内部,导致双机器人基坐标系间位姿关系的测量变得十分困难,而该关系作为机器人离线编程、协同控制的基石,对于多机器人系统的正常工作至关重要。为此提出了基于单目视觉的协同标定方法,利用单目视觉和棋盘格标定板求解双机器人基坐标系间位姿相对关系并使用激光跟踪仪标定法作为对照对双机器人基坐标系关系进行了标定,并通过双机器人位姿协同实验对标定的结果进行验证,最终得到基于单目视觉的协同标定方法所对应的双机器人位置协同误差最大值为1.278 mm,最小值为0.601 mm;姿态协同误差最大值则为0.481°。Abstract: Because the base coordinate system of the robot is hidden inside the base, it is very difficult to measure the pose relationship between the base coordinate system of the two robots. As the cornerstone of offline robot programming and cooperative control, this relationship is very important for the normal work of the multi-robot system. A collaborative calibration method based on monocular vision was proposed to solve the relative relation of pose between the base coordinate systems of the two robots by using monocular vision and checkerboard calibration plate. The laser tracker calibration method was used as a control to calibrate the relationship between the coordinate systems of the two robots, and the calibration results were verified by the cooperative experiment of the two robots' pose. Finally, the maximum and minimum position cooperative error of the two robots corresponding to the collaborative calibration method based on monocular vision was 1.278 mm and 0.601 mm. The maximum attitude synergy error is 0.481°.
-
Key words:
- dual robots /
- base coordinate system calibration /
- monocular vision
-
表 1 实验点的位置
试验点 x/mm y/mm z/mm 1 2 593.91 58.68 1 258.25 2 2 378.84 32.20 1 271.01 3 2 701.37 547.36 882.55 … … … … 30 2 977.98 724.46 1 182.67  下载: 导出CSV
下载: 导出CSV
-
[1] 周东健, 张兴国, 李成浩. 多机器人系统协同作业技术发展近况与前景[J]. 机电技术, 2013(6): 146-150. [2] Gan Y H, Dai X Z. Base frame calibration for coordinated industrial robots[J]. Robotics and Autonomous Systems, 2011, 59(7-8): 563-570. doi: 10.1016/j.robot.2011.04.003 [3] 董东辉. 协作机器人基坐标系标定研究[D]. 南京: 东南大学, 2012. [4] 董东辉, 戴先中, 甘亚辉. 典型安装方式的协作机器人基坐标系标定方法[J]. 工业控制计算机, 2012, 25(7): 46-50. [5] Zhang T, Fan O Y. Offline motion planning and simulation of two-robot welding coordination[J]. Frontiers of Mechanical Engineering, 2012, 7(1): 81-92. doi: 10.1007/s11465-012-0309-4 [6] 向勇, 田威, 洪鹏, 等. 双机器人钻铆系统协同控制与基坐标系标定技术[J]. 航空制造技术, 2016(16): 87-92. [7] Su J B. Base calibration for dual robot system[J]. Control Theory and Applications, 1998, 15(4): 575-582. [8] 韩鸣晓, 邓志祥, 蔡木良, 等. 单目视觉双臂机器人相对位姿的快速标定[J]. 机械设计与研究, 2018, 34(4): 23-26. [9] Arai T, Maeda Y, Kikuchi H, et al. Automated calibration of robot coordinates for reconfigurable assembly systems[J]. CIRP Annals-Manufacturing Technology, 2002, 51(1): 5-8. doi: 10.1016/S0007-8506(07)61454-1 [10] 邓仕超, 梅枫, 高兴宇, 等. 单目机器人手眼标定研究[J]. 组合机床与自动化加工技术, 2021(12): 53-57. [11] Wang G, Li W L, Jiang C, et al. Simultaneous calibration of multicoordinates for a dual-robot system by solving the AXB=YCZ problem[J]. IEEE Transactions on Robotics, 2021, 37(4): 1172-1185. doi: 10.1109/TRO.2020.3043688 [12] 燕浩, 程小虎, 杨正蒙, 等. 基于手眼关系与基坐标关系的协作焊接机器人标定[J]. 机械工程与自动化, 2020(4): 27-30. [13] Wang Z R, Liu Z W, Ma Q L, et al. Vision-based calibration of dual RCM-based robot arms in human-robot collaborative minimally invasive surgery[J]. IEEE Robotics and Automation Letters, 2017, 3(2): 672-679. [14] 周江澔, 刘子龙, 张辰骁, 等. 焊接机器人视觉系统标定方法[J]. 机械设计与制造工程, 2022(3): 47-52. doi: 10.3969/j.issn.2095-509X.2022.03.010 -

 下载:
下载:



 点击查看大图
点击查看大图
图(9) / 表(1)
计量
- 文章访问数: 58
- HTML全文浏览量: 41
- PDF下载量: 24
- 被引次数: 0


