

Mathematical modeling and simulation optimization of three-axis linkage steering mechanism based on Newton-Euler method
-
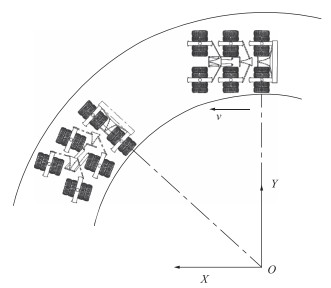
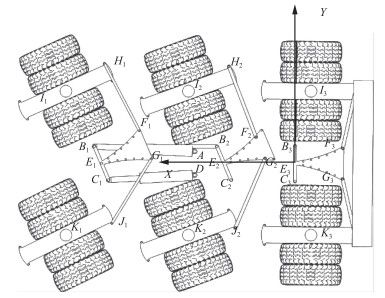
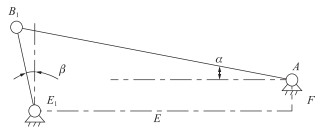
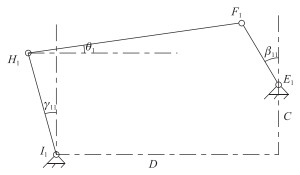
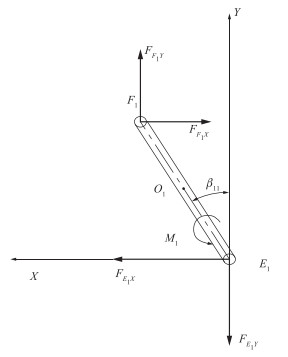
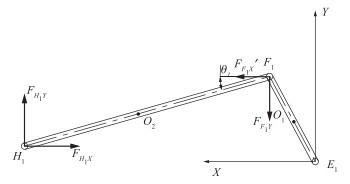
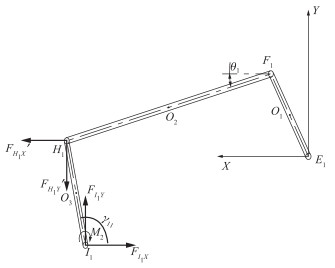
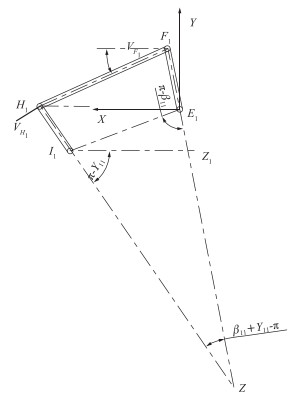
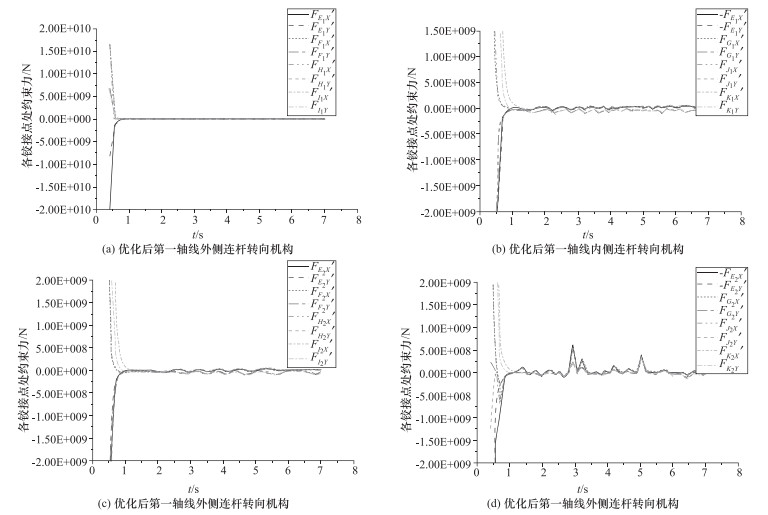
摘要: 针对三轴线车转向过程中存在的转向精度不高的问题,借助牛顿-欧拉法在多体建模上的优势,建立了三轴线连杆转向机构的数学模型,推导出转向机构的位置、角速度和受力方程,利用MATLAB软件与Adams软件搭建运动学模型和动力学模型,通过Simulink与Adams的联合仿真对三轴线连杆转向机构的关键点位进行仿真优化。仿真结果表明,经过优化后三轴线连杆转向机构的转向精度得到提高,转角误差降到2.2°以下,且各铰接点位受力更加稳定, 提高了转向稳定性。Abstract: Aiming at the problem of low steering accuracy in the steering process of three-axis vehicle, with the help of the advantages of Newton-Euler method in multi-body modeling, the mathematical model of three-axis linkage steering mechanism is established, the position, angular velocity and force equations of the mechanism are derived, and the kinematic model and dynamic model are established by using MATLAB software and ADAMS software, The key points of the three-axis linkage steering mechanism are simulated and optimized through the joint simulation of Simulink and Adams. The simulation results show that after optimization, the steering accuracy of the three-axis linkage steering mechanism is improved, the angle error is reduced to less than 2.2 °, and the force on each articulated point is more stable, which improves the steering stability.
-
Key words:
- axis car /
- linkage steering /
- modeling /
- simulation /
- model optimization
-
表 1 Adams模型点位表
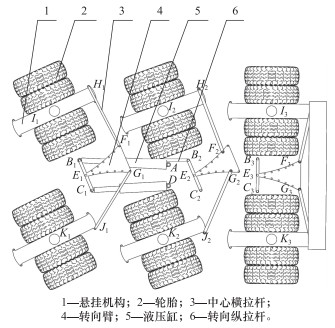
点位 x坐标 y坐标 第一轴线中点 0 0 E1点 450 0 I1点 0 910 H1点 588 1 030 K1点 0 -910 J1点 588 -1 030 第二轴线中点 1 550 0 E2点 2 000 0 B2点 2 000 230 J2点 1 550 910 K2点 1 550 -910 H2点 2 138 1 030 K2点 2 138 -1 030 点位 x坐标 y坐标 第三轴线中点 3 100 0 I3点 3 100 910 E3点 3 550 0 B3点 3 550 230 I3点 3 688 1 030 J3点 3 688 -1 030 K3点 3 100 -910 B1点 450 230  下载: 导出CSV
下载: 导出CSV
表 3 转向臂上的孔位优化后数据
点位 x坐标 y坐标 优化后F1点 903.48 175.05 优化后G1点 1 000.0 -150.64 优化后F2点 2 295.78 75.55 优化后G2点 2 409.88 -75.45
下载: 导出CSV
-
[1] 李伟, 郑柱, 曹轩豪, 等. 车辆质心侧偏角估计及其稳定性控制研究[J]. 重庆交通大学学报: 自然科学版, 2021. https://kns.cnki.net/kcms/detail/50.1190.U.20210116.1350.002.html [2] 陈修龙, 陈天祥. 机械原理课程设计中机器人机构的动力学建模与仿真[J]. 实验室研究与探索, 2021, 40(2): 109-114. https://www.cnki.com.cn/Article/CJFDTOTAL-SYSY202102023.htm [3] Bentz W, Hoang T, Bayasgalen E. Complete 3-D dynamic coverage in energy-constrained multi-UAV sensor network[J]. Autonomous Robots, 2017(11): 1-27. [4] 吴璞, 王宗彦, 何晓, 等. 基于螺旋理论的高速并联机器人动力学分析[J]. 机械传动, 2021, 45(5): 101-106, 132. https://www.cnki.com.cn/Article/CJFDTOTAL-JXCD202105015.htm [5] 周春国, 华涛, 宋泽森, 等. 重载车辆多轴Watt-Ⅱ型转向机构的尺寸综合[J]. 机械设计, 2020, 37(S1): 44-47. https://www.cnki.com.cn/Article/CJFDTOTAL-JXSJ2020S1011.htm [6] 陈国强, 周红鹏, 黄俊杰, 等. 考虑关节摩擦的3-PRS并联机构动力学建模研究[J]. 农业机械学报, 2021, 52(8): 416-426. https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX202108043.htm [7] 王殿君, 关似玉, 陈亚, 等. 六自由度搬运机器人动力学分析及仿真[J]. 机械设计与制造, 2017(1): 25-29. https://www.cnki.com.cn/Article/CJFDTOTAL-JSYZ201701007.htm [8] 王冰冰, 李美求, 罗竞波, 等. 卡登圆行星机构动力学分析[J]. 食品与机械, 2019, 35(10): 79-82. https://www.cnki.com.cn/Article/CJFDTOTAL-SPJX201910018.htm [9] 杨文斌, 李晶, 付莎莎. 基于凯恩法三柱塞式乳化液泵连杆惯性力的研究[J]. 西安工程大学学报, 2019, 33(6): 649-654. https://www.cnki.com.cn/Article/CJFDTOTAL-XBFZ201906012.htm [10] 郭秦阳, 施光林, 王冬梅. 电-液混合驱动的步态模拟系统中非固定Stewart平台的逆动力学分析[J]. 机床与液压, 2019, 47(9): 1-7. https://www.cnki.com.cn/Article/CJFDTOTAL-JCYY201909001.htm [11] Aheri S, Kazemi R, Tabatabai M. Analysis and optimization of vehicle steering system[C]. SAE International Congress and Exposition, 1998, 11(13): 132-138. [12] 陆海英, 张成铭, 郭艳秋, 等. 基于阿克曼原理的三轴车辆全轮转向最优控制[J]. 广西大学学报: 自然科学版, 2020, 45(3): 558-568. https://www.cnki.com.cn/Article/CJFDTOTAL-GXKZ202003009.htm [13] 王志福, 王阳, 白金, 等. 分布式驱动车辆动力学建模与稳定性研究[J]. 实验室研究与探索, 2021, 40(6): 111-118, 163. https://www.cnki.com.cn/Article/CJFDTOTAL-SYSY202106024.htm [14] 蒋晨迪, 王增伟, 史熙. 基于ADAMS和Simulink的自动扶梯附加制动器联合仿真[J]. 机械设计与研究, 2020, 36(3): 226-230, 233. https://www.cnki.com.cn/Article/CJFDTOTAL-JSYY202003043.htm [15] 赵君伟, 裘群海, 司世才, 等. 三自由度工业机器平台机电液一体化仿真[J]. 机床与液压, 2020, 48(7): 156-161. https://www.cnki.com.cn/Article/CJFDTOTAL-JCYY202007037.htm [16] 卢衷正, 戈振扬, 丁巍. 四足除草机器人的ADAMS与MATLAB联合仿真[J]. 机械科学与技术, 2016, 35(3): 375-380. https://www.cnki.com.cn/Article/CJFDTOTAL-JXKX201603010.htm -

 下载:
下载:

 点击查看大图
点击查看大图
图(14) / 表(3)
计量
- 文章访问数: 46
- HTML全文浏览量: 18
- PDF下载量: 33
- 被引次数: 0


