

Research on the robot’s compliant force control device
-
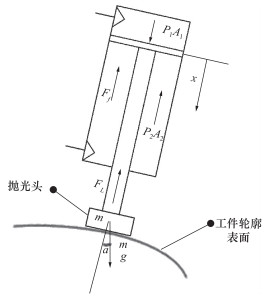
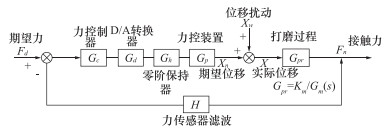
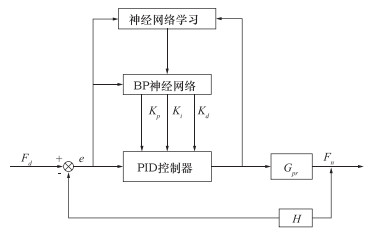
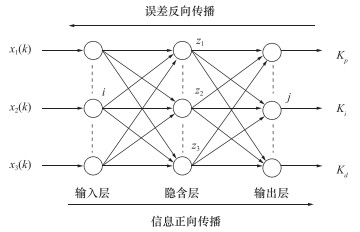
摘要: 机器人自动化抛光过程中, 工具与工件间的接触力控制尤为重要。基于主动柔顺控制的原理, 提出了面向工业机器人的柔顺力控装置及控制方法。进行了系统的结构设计和动力学建模, 基于BP神经网络PID算法, 设计了该柔顺力控装置的自适应控制策略。最后进行力控跟踪实验, 实验结果表明, 柔顺力控装置能够保证打磨过程中工件与工具之间的接触力恒定, 进而提高表面加工质量。Abstract: The control of the contact force between the tool and the workpiece is particularly important in the robot's automated polishing and grinding process. Based on the principle of active compliance control, this paper proposes a compliance force control device and control method for industrial robots. The structural design and dynamic modeling of the system are carried out. Based on the BP neural network PID algorithm, the adaptive control strategy of the compliant force control device is designed. Finally, the force control tracking experiment is carried out. The experimental results show that the compliance force control device can ensure the constant contact force between the workpiece and the tool during the grinding process, thereby improving the surface processing quality.
-
表 1 主要参数
参数 数值 A1/m2 7.854 0×10-5 A2/m2 6.597 3×10-5 m/kg 1.618 Km/(N/mm) 87.6 Ωn/(rad/s) 2π(15) ζ 0.07 η 0.5 α 0.04  下载: 导出CSV
下载: 导出CSV
-
[1] 欧阳生, 孔德洋. 工业4.0时代中国制造业新出路——《精益智能制造》推荐阅读[J]. 中国机械工程, 2018, 29(16): 2010-2015. doi: 10.3969/j.issn.1004-132X.2018.16.018 [2] Birkgan S E, Bachurin V I. Computer simulation of the two-stage ion polishing of a silicon surface[J]. Surface Investigation, X-Ray, Synchrotron and Neutron Techniques, 2014, 8(3): 524-529. doi: 10.1134/S1027451014030252 [3] 王田苗, 陶永. 我国工业机器人技术现状与产业化发展战略[J]. 机械工程学报, 2014, 50(9): 1-13. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201409001.htm [4] 刘金娥, 杨开. 全自动定量包装机的PLC控制系统[J]. 中国新技术新产品, 2016(1): 3. doi: 10.3969/j.issn.1673-9957.2016.01.002 [5] Yu T B, Zhang X, Xu X L, et al. Researches on virtual machining simulation of flexible manufacturing cell based on KUKA robot[J]. Key Engineering Materials, 2014, 621: 499-504. doi: 10.4028/www.scientific.net/KEM.621.499 [6] Huang W, Xu J, Zhu D, et al. Semi-active vibration control using a Magneto Rheological (MR) damper with particle swarm optimization[J]. Arabian Journal for Science and Engineering, 2015, 40(3): 747-762. doi: 10.1007/s13369-015-1574-4 [7] 张庆伟, 韩利利, 徐方, 等. 基于打磨机器人的力/位混合控制策略研究[J]. 化工自动化及仪表, 2012, 39(7): 884-887. doi: 10.3969/j.issn.1000-3932.2012.07.013 [8] Zhang X, Cabaravdic M, Kneupner K, et al. Real-time simulation of robot controlled belt grinding processes of sculptured surfaces[J]. International Journal of Advanced Robotic Systems, 2004, 1(2): 109-114. doi: 10.5772/5627 [9] 曹琪, 王皓, 余觉. 基于电磁变刚度的力控制装置研究[J]. 机械设计与研究, 2020, 36(3): 170-175. https://www.cnki.com.cn/Article/CJFDTOTAL-JSYY202003033.htm [10] 朱贺轩, 赵勇, 余觉, 等. 面向打磨力控制的电磁柔顺单元控制策略仿真分析[J]. 机械设计与研究, 2019, 35(4): 20-25. https://www.cnki.com.cn/Article/CJFDTOTAL-JSYY201904009.htm [11] 丁毓峰, 付巍巍. 工业机器人模具抛光方法研究及仿真[J]. 机械设计与研究, 2017, 33(4): 131-135. https://www.cnki.com.cn/Article/CJFDTOTAL-JSYY201704035.htm [12] De Queiroz M S, Hu J, Dawson D M, et al. Adaptive position/force control of robot manipulators without velocity measurements: theory and experimentation[J]. IEEE Trans Syst Man Cybern B Cybern, 1997, 27(5): 796-809. doi: 10.1109/3477.623233 [13] Kiguchi K, Fukuda T. Position/force control of robot manipulators for geometrically unknown objects using fuzzy neural networks[J]. IEEE Transactions on Industrial Electronics, 2000, 47(3): 641-649. doi: 10.1109/41.847905 [14] M. T M. Compliance and force control for computer controlled manipulators[J]. IEEE Transactions on Systems, Man, and Cybernetics, 1981, 11(6): 418-432. https://ieeexplore.ieee.org/document/4308708 [15] Ohishi K, Miyazaki M, Fujita M, et al. Hybrid control of robot manipulator without force sensor - sciencedirect[J]. IFAC Proceedings Volumes, 1993, 26(2): 991-996. doi: 10.1016/S1474-6670(17)48619-8 [16] Tian F, Lv C, Li Z, et al. Modeling and control of robotic automatic polishing for curved surfaces[J]. CIRP Journal of Manufacturing Science and Technology, 2016, 14: 55-64. doi: 10.1016/j.cirpj.2016.05.010 [17] Zhao X, Hu Y, Hagiwara I. Shape optimization to improve energy absorption ability of cylindrical thin-walled origami structure[J]. Journal of Computational Science and Technology, 2011, 5(3): 148-162. doi: 10.1299/jcst.5.148 [18] Brecher C, Tuecks R, Zunke R, et al. Development of a force controlled orbital polishing head for free form surface finishing[J]. Production Engineering, 2010, 4(2-3): 269-277. doi: 10.1007/s11740-010-0221-x [19] Liao L, Xi F J, Liu K. Adaptive control of pressure tracking for polishing process[J]. Journal of Manufacturing Science and Engineering-Transactions of the ASME, 2010, 132(1). https://asmedigitalcollection.asme.org/manufacturingscience/article/132/1/011015/468538/Adaptive-Control-of-Pressure-Tracking-for [20] Güvenç L, Srinivasan K. Force controller design and evaluation for robot-assisted die and mould polishing[J]. Mechanical Systems and Signal Processing, 1995, 9(1): 31-49. doi: 10.1006/mssp.1995.0003 [21] 闫浩安, 李建冬. 基于改进神经网络PID的永磁同步电机控制研究[J]. 现代防御技术, 2021, 49(4): 43-48. https://www.cnki.com.cn/Article/CJFDTOTAL-XDFJ202104008.htm [22] 张学燕, 高培金, 刘勇. BP神经网络PID控制器在工业控制系统中的研究与仿真[J]. 自动化技术与应用, 2010, 29(5): 9-12. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDHJ201005004.htm [23] 张玲玲. 基于BP神经网络PID控制的风电叶片静力加载系统[J]. 煤炭加工与综合利用, 2021(2): 88-91. https://www.cnki.com.cn/Article/CJFDTOTAL-MTJG202102024.htm [24] 黄昆. 基于神经网络PID的盲区危险目标自动避碰系统研究[J]. 汽车文摘, 2021(7): 50-58. https://www.cnki.com.cn/Article/CJFDTOTAL-QCWZ202107013.htm [25] 李锋, 张桂堂, 梁辉. 基于神经网络PID的温湿度控制系统设计[J]. 计算机与数字工程, 2021, 49(6): 1097-1101. doi: 10.3969/j.issn.1672-9722.2021.06.012 [26] 赵志鑫, 苏东海. 基于神经网络PID控制的自动装配平台电液位置伺服系统[J]. 机械工程师, 2021(9): 55-56, 59. https://www.cnki.com.cn/Article/CJFDTOTAL-JXGU202109018.htm [27] 王敬志, 任开春, 胡斌. 基于BP神经网络整定的PID控制[J]. 工业控制计算机, 2011, 24(3): 72-73. https://www.cnki.com.cn/Article/CJFDTOTAL-GYKJ201103039.htm -

 下载:
下载:

 点击查看大图
点击查看大图
图(9) / 表(1)
计量
- 文章访问数: 258
- HTML全文浏览量: 23
- PDF下载量: 39
- 被引次数: 0


