

Energy-efficient path planning for a single-load AGV executing multiple transport tasks
-
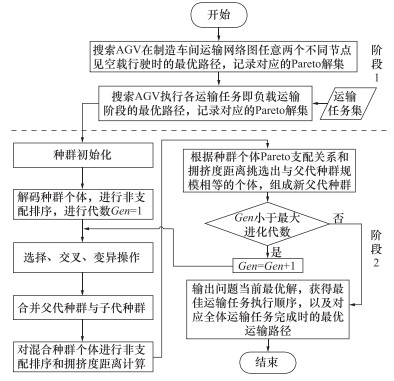
摘要: 节能路径规划已被证明是提高自动导引运输车(automated guided vehicle, AGV)使用过程能效, 促进生产车间节能的一种可行方法。目前从路径规划角度开展的AGV能耗优化研究主要面向单项运输任务, 很少涉及多项运输任务。为此, 以单负载AGV为研究对象, 建立了面向多运输任务, 以运输距离和能耗为优化目标的节能AGV路径规划模型, 进而提出了一种两阶段模型求解方法: 阶段1针对各运输任务关联的负载运输阶段和可能的空载运输阶段进行节能路径规划, 搜索其最优运输路径; 阶段2利用非支配排序遗传算法确定最佳的运输任务执行顺序和各运输阶段的最佳运输路径。最后, 案例研究验证了模型节能效果。Abstract: Energy-efficient path planning has been proved to be a feasible approach to improve the energy efficiency of an automated guided vehicle (AGV) and promote the energy saving of a manufacturing workshop. Current research on AGV energy consumption (EC) optimization from the perspective of path planning mainly focuses on a single transport task, and rarely involves multiple transport tasks. To fill the gap, with a single load AGV as the research object, an energy-efficient AGV path planning model is established, which is oriented to multiple transport tasks and takes transport distance and EC as the optimization objectives. Then, a two-stage solution method is proposed. In the first stage, the energy-efficient AGV path planning is executed for the load transport stage associated with each transport task, and the possible no-load transport stages, to obtain the corresponding optimal paths. In the second stage, the non-dominated sorting genetic algorithm-Ⅱ is adopted to determine the optimal transport task execution order and select the best transport path for each transport stage. Finally, the case study verifies the energy-saving effect of the presented model.
-
表 2 AGV执行各运输任务的最优节能路径
任务序号 路径序号 路径 优化目标 D/m Etotal/kJ 1 1 25→17→16→15→14→13→12→11→19→18→26→35 86.4 5.893 7 2 25→17→16→15→14→13→12→11→19→27→26→35 86.4 5.893 7 3 25→34→48→47→46→45→44→43→35 91.2 5.774 7 2 1 25→17→16→15→14→13→12→11→19→18→26→35 86.4 6.069 4 2 25→17→16→15→14→13→12→11→19→27→26→35 86.4 6.069 4 3 25→34→48→47→46→45→44→43→35 91.2 6.000 1 3 1 9→10→11→12→13→21→32 43 3.017 5 2 9→18→26→27→30→31→32 43 3.017 5 3 9→18→19→27→30→31→32 43 3.017 5 4 1 8→16→15→23→22→21→20 40.2 3.035 2 2 8→16→15→14→13→21→20 40.2 3.035 2 5 1 18→19→11→12→13→14→15→23→28 55.6 4.004 1  下载: 导出CSV
下载: 导出CSV
-
[1] Morteza G. The future of manufacturing industry: a strategic roadmap toward Industry 4.0[J]. Journal of Manufacturing Technology Management, 2018, 29(6): 910-936. doi: 10.1108/JMTM-02-2018-0057 [2] 王秋莲, 李聪波, 刘飞. 一种通用的机械加工系统能量效率评价方法[J]. 计算机集成制造系统, 2017, 23(6): 1320-1325. https://www.cnki.com.cn/Article/CJFDTOTAL-JSJJ201706018.htm [3] Meiβner M, Massalski L. Modeling the electrical power and energy consumption of automated guided vehicles to improve the energy efficiency of production systems[J]. The International Journal of Advanced Manufacturing Technology, 2020, 110(1-2): 481-498. doi: 10.1007/s00170-020-05796-8 [4] Zhang S, Gajpal Y, Appadoo S S, et al. Electric vehicle routing problem with recharging stations for minimizing energy consumption[J]. International Journal of Production Economics, 2018, 203: 404-413. doi: 10.1016/j.ijpe.2018.07.016 [5] 郭亚铭, 武照云, 张中伟, 等. 柔性制造车间单AGV节能路径规划研究[J]. 组合机床与自动化加工技术, 2020(10): 181-184. https://www.cnki.com.cn/Article/CJFDTOTAL-ZHJC202010043.htm [6] 王晨曦. 考虑绿色节能的车间AGV物流规划与调度[D]. 武汉: 武汉纺织大学, 2020. [7] 张中伟, 李俊兰, 吴立辉, 等. 考虑能耗的制造车间单AGV路径规划研究[J]. 制造技术与机床, 2021(3): 118-122. https://www.cnki.com.cn/Article/CJFDTOTAL-ZJYC202103025.htm [8] Deb K, Pratap A, Agarwal S, et al. A fast and elitist multi-objective genetic algorithm: NSGA-Ⅱ[J]. IEEE Transactions on Evolutionary Computation, 2002, 6(2): 182-197. doi: 10.1109/4235.996017 [9] Zhang Z, Wu L, Jia S, et al. Multi-objective parameter optimization to support energy-efficient peck deep-hole drilling processes with twist drills[J]. The International Journal of Advanced Manufacturing Technology, 2020, 106 (11-12): 4913-4932. doi: 10.1007/s00170-020-04967-x [10] Mohemmed A W, Sahoo N C, Geok T K. Solving shortest path problem using particle swarm optimization[J]. Applied Soft Computing, 2008, 8(4): 1643-1653. doi: 10.1016/j.asoc.2008.01.002 -

 下载:
下载:


 点击查看大图
点击查看大图
图(6) / 表(4)
计量
- 文章访问数: 31
- HTML全文浏览量: 32
- PDF下载量: 13
- 被引次数: 0


