

The position and workspace analysis of (2PSR+PUU)&RP hybrid machine tool
-
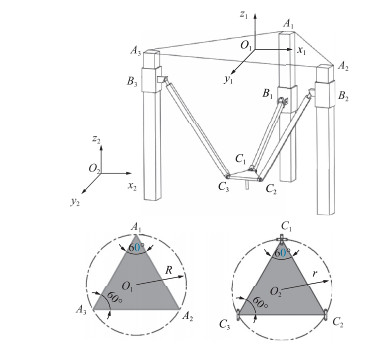
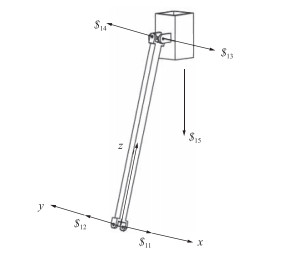
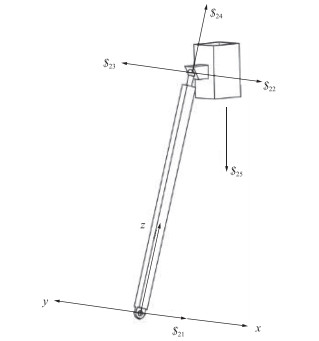
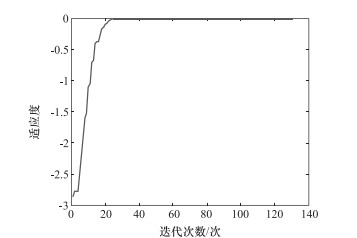
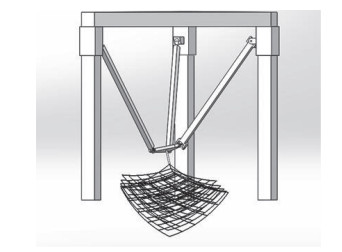
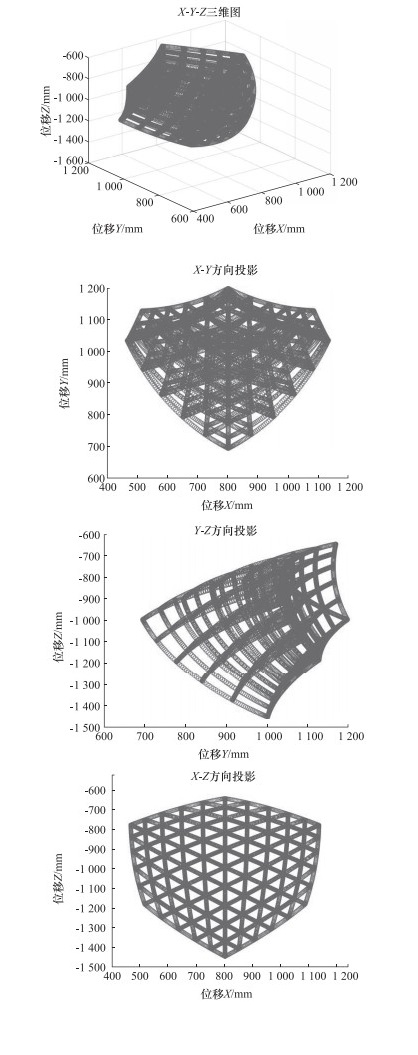
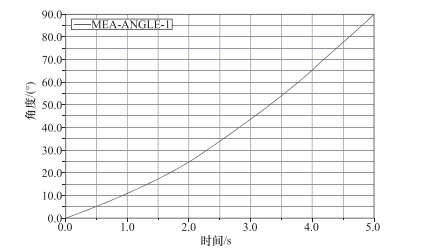
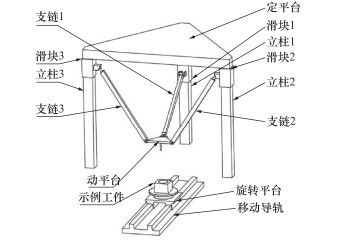
摘要: 针对并联机床摆角小,难以加工复杂曲面零件的缺点,提出一种新型(2PSR+PUU)&RP混联机床的机构构型。首先运用螺旋理论以及修正的K-G公式对机构自由度进行分析计算与验证。运用闭环矢量法对机构进行运动学分析,给出该机构的位置逆解以及基于粒子群算法的正解,确定驱动块和动平台的位姿关系。在SolidWorks软件中采用动静结合法绘制出其工作空间,并利用ADAMS对其摆角进行测算,验证了机构模型的正确性以及机构运动的可实现性。研究表明,混联机床具有3T2R这5个自由度,有较大的工作空间,且其刀具摆角可达(0°~90°),通过刀具的大摆角转动和五轴联动可应用于部分汽轮机,水轮机和航空发动机的叶片和复杂曲面零件的加工。Abstract: A novel (2PSR+PUU) &RP hybrid machine tool was proposed to solve the disadvantages of small swing angle and difficulty in machining complex curved parts.Firstly, the screw theory and modified K-G formula were used to analyze, calculate and verify the degree of freedom of the mechanism.The closed-loop vector method was used to analyze the kinematics of the mechanism, and the inverse solution and the positive solution based on the particle swarm optimization algorithm were given to determine the position and pose relationship between the driving block and the moving platform.In SolidWorks, the working space is drawn by static and static method, and the pendulum angle is calculated by ADAMS, which verifies the correctness of the mechanism model and the realizability of the mechanism motion.The results show that the hybrid machine tool has 3T2R five degrees of freedom, has a large working space, and the tool swing angle can reach (0°~90°), through the large swing angle of the tool rotation and five-axis linkage can be applied to the turbine, hydraulic turbine and aero-engine blade and complex surface parts processing.
-
Key words:
- large angular /
- screw theory /
- inverse position solution /
- particle swarm optimization /
- workspace
-
表 2 粒子群优化算法参数取值
参数 数值 学习因子 2 惯性权重 0.9 空间维数 3 种群规模 50 最大迭代次数 2 000 x取值范围 [-400, 400] z取值范围 [0, 500] α取值范围 [0, 90]  下载: 导出CSV
下载: 导出CSV
表 3 位置正解运算结果
算例 输入 输出 S1 S2 S3 x z α 1 0 10 10 10.397 52.380 44.556 2 10 30 50 10.407 26.667 44.694 3 50 20 30 10.398 60.226 36.407 4 100 20 50 10.295 84.560 39.434 5 150 50 50 10.408 95.412 44.456
下载: 导出CSV
-
[1] 崔宁. 并联机器人机构的创新与应用研究进展[J]. 电子世界, 2020(21): 19-20. https://www.cnki.com.cn/Article/CJFDTOTAL-ELEW202021016.htm [2] Hiwa G, Gholamhasan P, Mohammadreza A. Kinematic design of a novel 4-DOF parallel mechanism for turbine blade machining[J]. The International Journal of Advanced Manufacturing Technology, 2014, 74(5-8): 729-739. doi: 10.1007/s00170-014-6015-0 [3] Harib K H, Sharif U A M M, Hammami A. A hexapod-based machine tool with hybrid structure: Kinematic analysis and trajectory planning[J]. International Journal of Machine Tools and Manufacture, 2006, 47(9): 1426-1432. [4] 孟祥志, 孙奕澎, 黄玮, 等. 新型三腿并联机床的速度及加速度分析[J]. 东北大学学报, 2003(3): 264-267. doi: 10.3321/j.issn:1005-3026.2003.03.016 [5] 许健, 王辉, 倪雁冰, 等. 一种新型五轴联动机床的运动控制研究[J]. 机械设计, 2015, 32(1): 51-56. https://www.cnki.com.cn/Article/CJFDTOTAL-JXSJ201501011.htm [6] 鲁岩, 薄瑞峰, 冯鹏升, 等. 一种大摆角五轴联动混联机床设计及运动学分析[J]. 机械传动, 2016, 40(10): 38-42. https://www.cnki.com.cn/Article/CJFDTOTAL-JXCD201610008.htm [7] 薄瑞峰, 鲁岩, 郭晓南, 等. 一种大摆角五轴联动混联机床并联模块的误差分析[J]. 机械设计与研究, 2019, 35(1): 47-52. https://www.cnki.com.cn/Article/CJFDTOTAL-JSYY201901015.htm [8] 仇鑫, 尤晶晶, 王林康, 等. Stewart衍生型并联机器人的运动雅可比矩阵推导[J]. 机械设计与研究, 2020, 36(6): 79-84. https://www.cnki.com.cn/Article/CJFDTOTAL-JSYY202006016.htm [9] 徐帅, 尤晶晶, 沈惠平, 等. 两种可重构六自由度并联机构的拓扑特性分析[J]. 机械设计与研究, 2020, 36(6): 44-48, 53. https://www.cnki.com.cn/Article/CJFDTOTAL-JSYY202006009.htm [10] 杨应洪, 尹显明. 一种3自由度并联机床的性能分析[J]. 机械设计与制造, 2019(10): 134-139. https://www.cnki.com.cn/Article/CJFDTOTAL-JSYZ201910036.htm [11] 王昊杰, 薛强. 一种三坐标并联动力头——Sprint Z3的运动学逆解及尺度综合[J]. 机床与液压, 2011, 39(17): 53-56. https://www.cnki.com.cn/Article/CJFDTOTAL-JCYY201117016.htm [12] 黄真, 赵永生, 赵铁石. 高等空间机构学[M]. 2版. 北京: 高等教育出版社, 2014: 339-378. -

 下载:
下载:

 点击查看大图
点击查看大图
图(8) / 表(3)
计量
- 文章访问数: 38
- HTML全文浏览量: 16
- PDF下载量: 168
- 被引次数: 0


