

Research on tracking and grinding control of inner wall spiral weld seam in super long cylinder section
-
摘要:
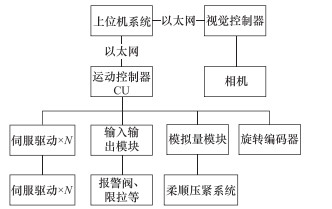
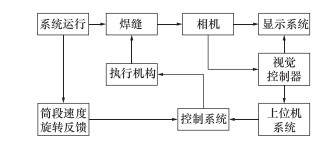
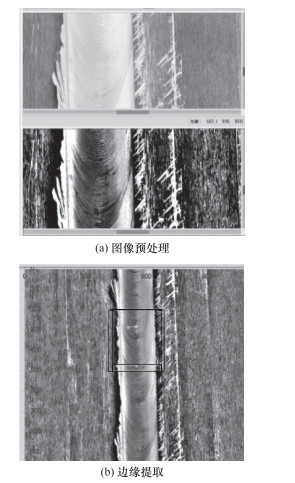
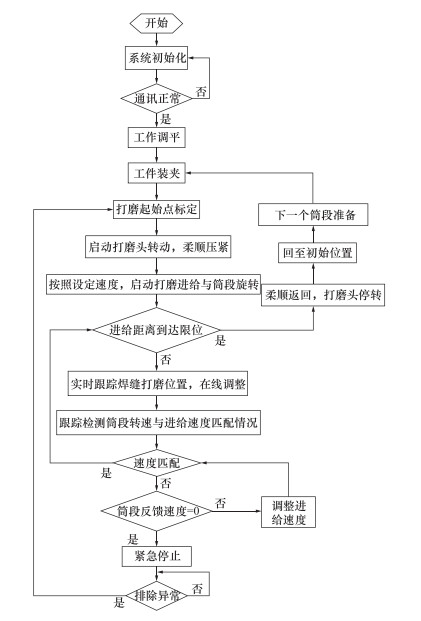
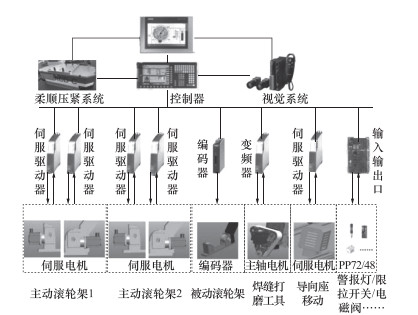
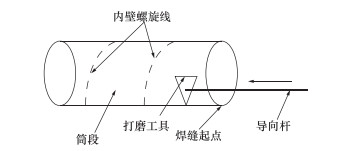
针对超长筒段内壁螺旋焊缝的打磨需求,设计了一种高精度内壁螺旋线焊缝打磨控制方法,通过速度反馈匹配、视觉图像补偿等多重手段,建立了实时跟踪检测机制,解决了螺旋线焊缝跟踪不同步的问题,实现了焊缝的精确打磨加工。通过实验验证了此控制方法的可行性,采用西门子的控制系统、伺服驱动器、编码器和视觉图像系统,结合机械结构系统,包括滚轮架、柔顺打磨工具、电机及行走轨道等,搭建全闭环软硬件控制系统平台,经过调试验证,通过图像系统实时监控和实际打磨效果的结合,验证了此方法应用于内壁螺旋线打磨的有效性,实现了精确跟踪打磨。
Abstract:According to the grinding requirements of inner wall spiral weld of super long cylinder section, one kind of high-precision inner wall spiral weld grinding control method is designed. Through multiple means such as speed feedback matching and visual image compensation, a real-time tracking and detection mechanism is established, the problem of asynchronous tracking of spiral weld is solved, and the accurate grinding of weld is realized. The feasibility of this control method is verified by experiments. A full closed-loop software and hardware control system platform is built by using Siemens control system, servo driver, encoder and visual image system, combined with mechanical structure system, including roller frame, compliant grinding tool, motor and walking track. After debugging and verification, through the combination of real-time monitoring of image system and actual grinding effect, the effectiveness of this method applied to inner wall spiral grinding is verified, and accurate tracking grinding is realized.
-
Key words:
- spiral weld of inner wall /
- weld tracking /
- visual inspection /
- speed matching
-
表 1 硬件配置列表
名称 型号 控制系统 828D PPU281.3 主动滚轮架电机 1FK7063 进给电机 1FK7083 旋转编码器 6FX2001 输入输出模块 PP72/48  下载: 导出CSV
下载: 导出CSV
表 2 相机配置列表
名称 参数 黑白相机/像素 400万 镜头/mm 16 安装距离/mm 323 分辨率(X)/(μm/像素) 73.2 分辨率(Y)/(μm/像素) 73.2 视野范围/(mm×mm) 150×150
下载: 导出CSV
表 3 打磨砂带配置列表
名称 参数 砂带宽度/mm 60 砂带目数 80、120、150 砂带材料 堆积氧化铝 打磨压力/N -200~250 砂带电机旋转速度/(mm/s) 1 000~1 500 打磨前进速度/(mm/s) 0~200
下载: 导出CSV
-
[1] 王悦. 低温环境中S F6/N 2混合气体绝缘特性的研究[D]. 哈尔滨: 哈尔滨工业大学, 2016. [2] 胡振海, 计然, 陈显东, 等. 一种木皮缺陷视觉识别与自动打磨工作站: 中国, CN208614535U[P]. 2019-03-19. [3] 田国富, 徐远. 基于机器视觉的毛坯件磨削轨迹识别研究[J]. 制造技术与机床, 2019(9): 20-25. https://www.cnki.com.cn/Article/CJFDTOTAL-ZJYC201909004.htm [4] 周强. 基于被动视觉传感的焊接路径获取与轨迹规划[D]. 长沙: 中南大学, 2013. [5] 林明盛. 焊接路径的视觉识别与机器人轨迹规划[D]. 广州: 广东工业大学, 2016. [6] 吴艳凤. 一种机器人视觉检测智能化压铸件毛坯打磨装置: 中国, CN211439314U[P]. 2020-09-08. [7] 刘伟, 童慧芬, 郑森伟, 等. 一种基于视觉的铸件打磨装置: 中国, CN209425182U[P]. 2019-09-24. [8] 范俊峰, 景奉水, 方灶军. 基于视觉传感的焊缝跟踪技术研究现状和发展趋势[J]. 热加工工艺, 2017(5): 14-18, 22. https://www.cnki.com.cn/Article/CJFDTOTAL-SJGY201705003.htm [9] 王小刚, 王中任, 刘德政, 等. 全位置管道焊接的纯滞后激光视觉跟踪技术[J]. 机床与液压, 2020, 48(4): 23-28. https://www.cnki.com.cn/Article/CJFDTOTAL-JCYY202004006.htm [10] 林大钧. 计算机工程图形算法及应用[M]. 上海: 华东理工大学出版社, 2006. [11] 钱晨, 邬舟平, 范振昌, 等. 内壁螺旋线焊缝打磨控制方法及装置: CN108032147B[P]. 2019-10-25. [12] 项辉宇, 刘倩倩, 韩宝安, 等. 基于HALCON的单目视觉系统冲压件的几何特征检测[J]. 制造业自动化, 2014, 36(12): 48-50, 63. doi: 10.3969/j.issn.1009-0134.2014.12.012 [13] 李云峰, 赵熹华. 基于图像处理铜包铝线缆TIG焊焊缝自动跟踪方法[J]. 焊接, 2008(2): 43-46, 71. https://www.cnki.com.cn/Article/CJFDTOTAL-HAJA200802017.htm [14] 陈艳, 张新运, 范振昌, 等. 超长, 大口径铝合金管内壁打磨, 平头倒棱装置及方法: 中国, CN108000158A[P]. 2018-05-08. [15] 曾强, 田怀文, 汤瑞清. 基于CAD的双轴双通道孔群加工自动编程系统的开发[J]. 机械研究与应用, 2017, 30(2): 146-149. https://www.cnki.com.cn/Article/CJFDTOTAL-JXYJ201702046.htm -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 29
- HTML全文浏览量: 12
- PDF下载量: 10
- 被引次数: 0


