

Research on teaching of rehabilitation robot arm based on variable admittance and compliant strategy
-
摘要: 针对康复机械臂在康复示教过程中随动效果不佳的问题,设计了在关节空间内结合力矩微分项的导纳控制器,并利用双曲正切函数设计了改进的变导纳控制策略。在Adams与MATLAB/Simulink联合仿真平台上进行了示教仿真,并搭建了实物示教试验平台进行了验证。结果表明,该变导纳控制器能够较好地实现示教功能,同时降低了轨迹跟随误差及人机交互力矩的大小,提高随动效果,示教重复性高。Abstract: Aiming at the problem of poor follow-up effect of the rehabilitation robot arm in the rehabilitation teaching process, an admittance controller combining the torque differential term in the joint space is designed, and an improved variable admittance control strategy is designed in combination with the hyperbolic tangent function. The teaching simulation was carried out on the Adams and MATLAB/Simulink joint simulation platform, and a physical teaching experiment platform was built for verification. The results show that the variable admittance controller can better realize the teaching function, while reducing the trajectory following error and the size of the human-computer interaction torque, improving the follow-up effect, and the teaching repeatability.
-
表 1 机械臂标准DH参数表
Joint(j) ${\alpha _i}/{\text{rad}}$ ${a_i}/{\text{m}}$ ${d_i}/{\text{m}}$ ${\theta _i}/{\text{rad}}$ 1 $ - {{\text{π }} \mathord{\left/ {\vphantom {{\text{π }} 3}} \right. } 3}$ 0 0 ${\theta _1}$ 2 $ - {{\text{π }} \mathord{\left/ {\vphantom {{\text{π }} 3}} \right. } 3}$ 0 0 ${\theta _2}$ 3 0 0.246 0 ${\theta _3}$ 4 0 0.464 0 ${\theta _4}$  下载: 导出CSV
下载: 导出CSV
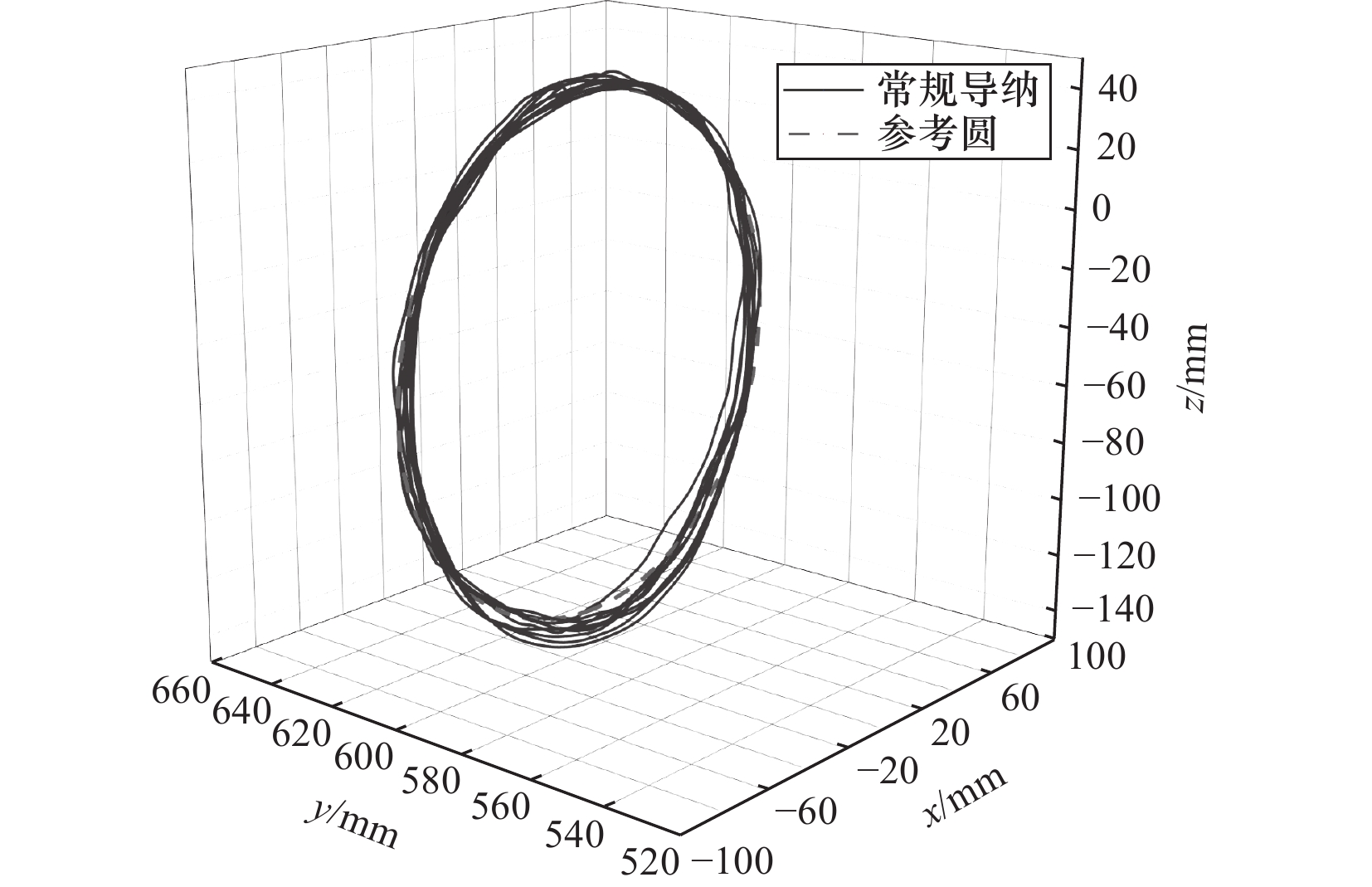
表 2 仿真实验误差分析
mm 误差绝对值 常规导纳 改进导纳 改进变导纳 x向最大值 6.218 9 7.228 0 7.513 2 x向平均值 3.130 6 2.071 2 1.537 7 y向最大值 2.627 6 1.296 9 1.230 8 y向平均值 0.938 7 0.434 3 0.351 5 z向最大值 6.331 7 3.815 1 4.545 8 z向平均值 2.474 6 1.272 8 0.974 3
下载: 导出CSV
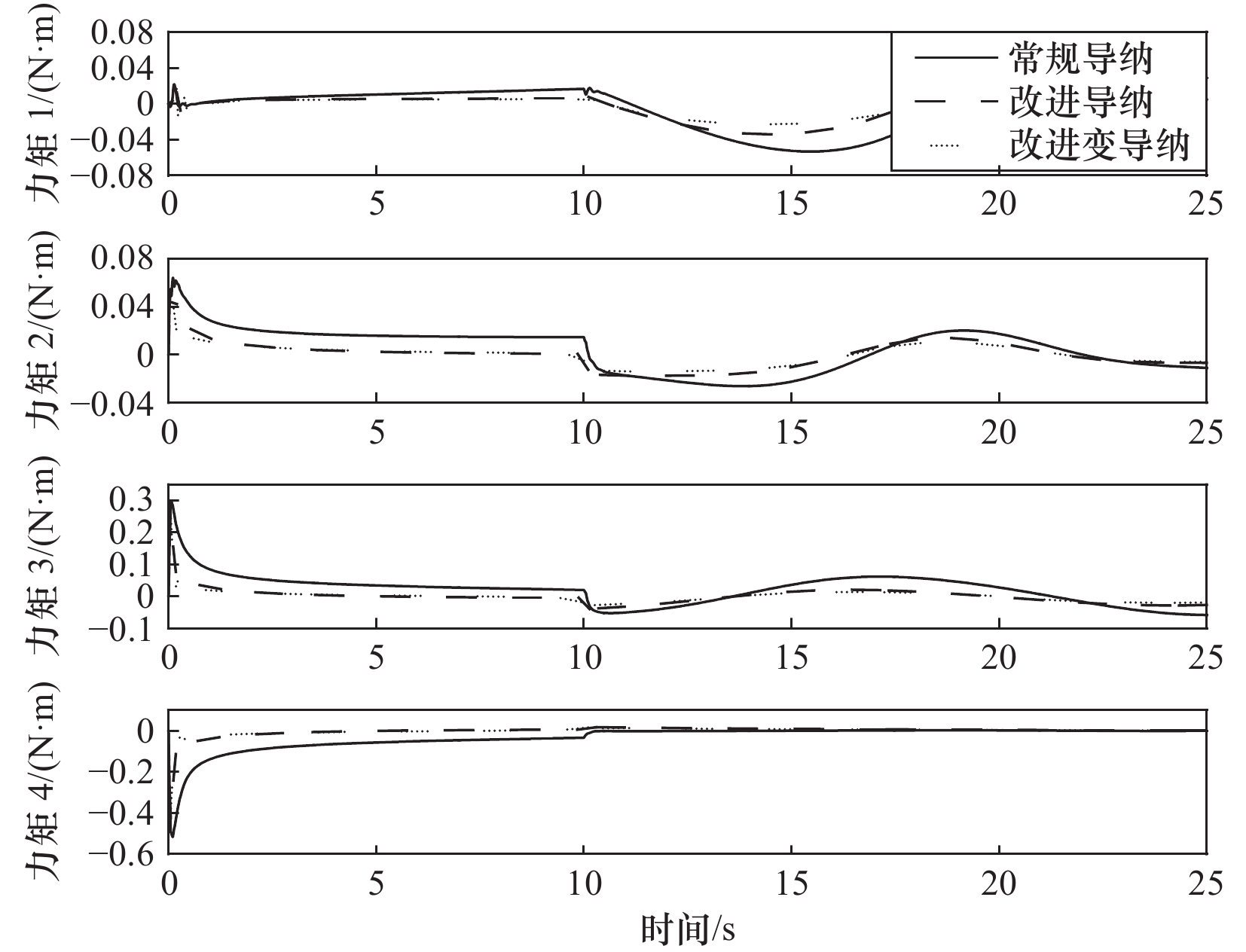
表 3 仿真实验人机交互力矩分析
N·m 力矩绝对值 常规导纳 改进导纳 改进变导纳 关节1最大值 0.070 2 0.050 6 0.038 4 关节1平均值 0.031 7 0.016 1 0.012 4 关节2最大值 0.064 4 0.051 9 0.043 1 关节2平均值 0.015 8 0.010 9 0.008 8 关节3最大值 0.299 4 0.273 9 0.266 5 关节3平均值 0.041 1 0.026 3 0.019 7 关节4最大值 0.518 0 0.436 0 0.416 1 关节4平均值 0.031 7 0.016 1 0.012 4
下载: 导出CSV
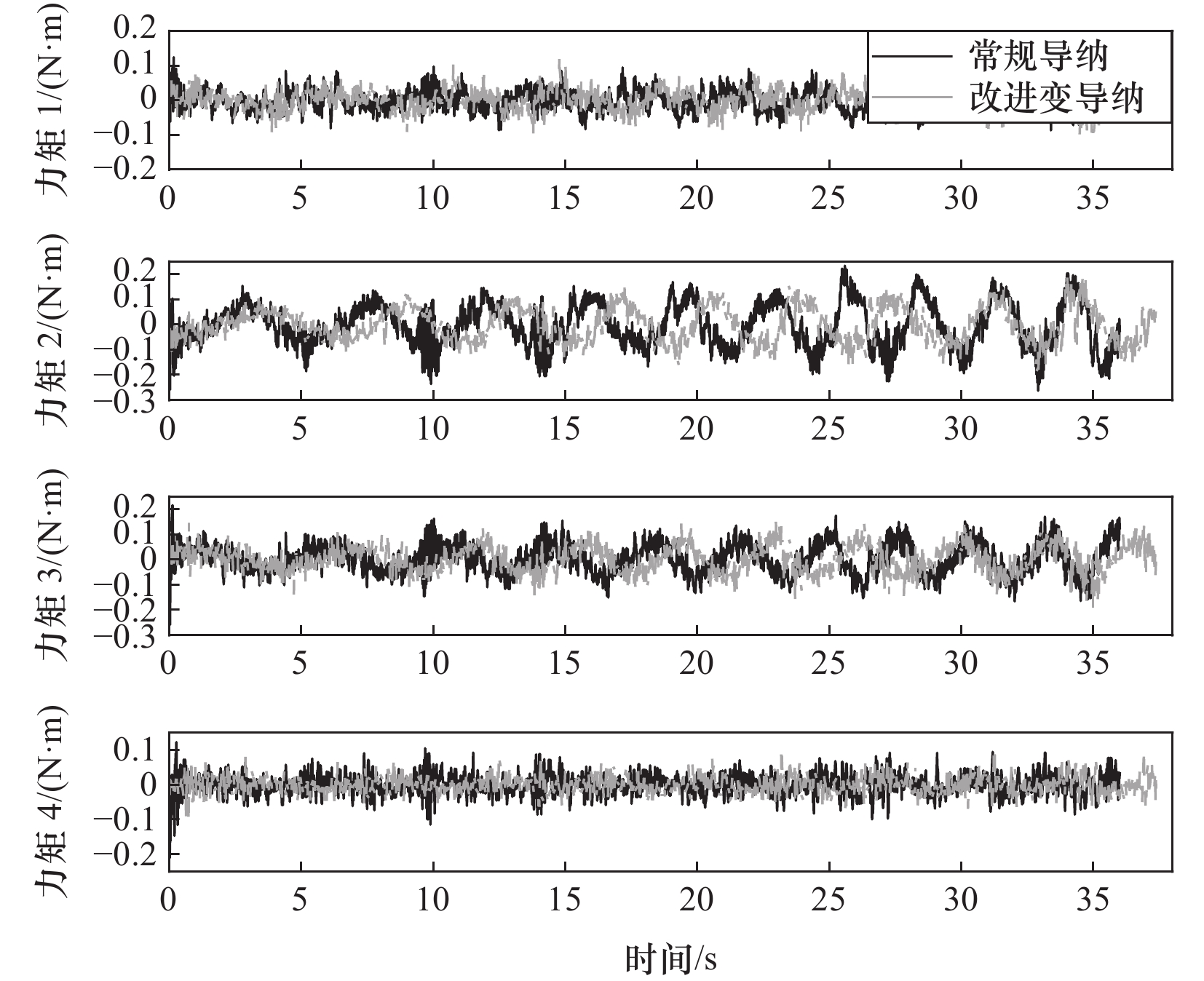
表 5 实物试验人机交互力矩绝对值分析
N·m 关节交互力矩绝对值 示教方法 最大值 标准差 平均值 1 常规导纳 0.073 9 0.014 3 0.019 5 改进变导纳 0.073 3 0.013 5 0.018 6 2 常规导纳 0.195 8 0.040 4 0.068 3 改进变导纳 0.149 4 0.031 0 0.054 1 3 常规导纳 0.149 6 0.027 3 0.042 0 改进变导纳 0.105 2 0.023 0 0.037 8 4 常规导纳 0.153 2 0.010 3 0.011 7 改进变导纳 0.056 0 0.009 0 0.010 9
下载: 导出CSV
-
[1] 李振光, 伍期专. 卒中预警研究的现状与展望[J]. 中国卒中杂志, 2008(11): 791-797. doi: 10.3969/j.issn.1673-5765.2008.11.002 [2] 张通. 中国脑卒中康复治疗指南(2011完全版)[J]. 中国医学前沿杂志:电子版, 2012, 4(6): 55-76. [3] 郭庆军, 李佩芳. 脑卒中后平衡障碍的康复治疗进展[J]. 中医药临床杂志, 2012, 24(6): 569-571. [4] 赵小磊, 林木松, 李齐, 等. 基于加速度传感器的下肢康复机器人示教训练[J]. 传感技术学报, 2016, 29(10): 1596-1601. doi: 10.3969/j.issn.1004-1699.2016.10.021 [5] Kulic D, Ott C, Lee D, et al. Incremental learning of full body motion primitives and their sequencing through human motion observation[J]. The International Journal of Robotics Research, 2011, 31(3): 330-345. [6] 张浩萍. 基于双目视觉的康复机器人轨迹规划[D]. 沈阳: 东北大学, 2014. [7] Hogan N. Impedance control: an approach to manipulation[J]. Journal of Dynamic Systems, Measurement and Control, 1985: 8-16. [8] 郭冰菁. 柔性下肢步态康复训练机器人人机共融理论研究[D]. 洛阳: 河南科技大学, 2019. [9] Abu-Dakka F J, Saveriano M. Variable impedance control and learning - A review[J]. Frontiers in Robotics and AI, 2020, 7: 590681. doi: 10.3389/frobt.2020.590681 [10] 付兴, 徐海波, 李月,等. 基于导纳控制的喷涂机器人直接示教方法研究[J]. 现代制造工程, 2020(12): 49-54,82. [11] 吴青聪, 王兴松, 吴洪涛, 等. 上肢康复外骨骼机器人的模糊滑模导纳控制[J]. 机器人, 2018, 40(4): 457-465. [12] 赫向阳. 七自由度仿人机械臂直接示教方法研究[D]. 武汉: 华中科技大学, 2017. [13] 杜志江, 王伟, 闫志远, 等. 基于模糊强化学习的微创外科手术机械臂人机交互方法[J]. 机器人, 2017, 39(3): 363-370. [14] 王飞, 晁智强, 张传清, 等. 机器人手臂运动轨迹跟踪变导纳控制仿真[J]. 计算机仿真, 2018, 35(12): 280-285. doi: 10.3969/j.issn.1006-9348.2018.12.066 -

 下载:
下载:






 点击查看大图
点击查看大图

图(18) / 表(5)
计量
- 文章访问数: 66
- HTML全文浏览量: 26
- PDF下载量: 42
- 被引次数: 0


