

Design and analysis of fixed tapping robot based on RPP series mechanism
-
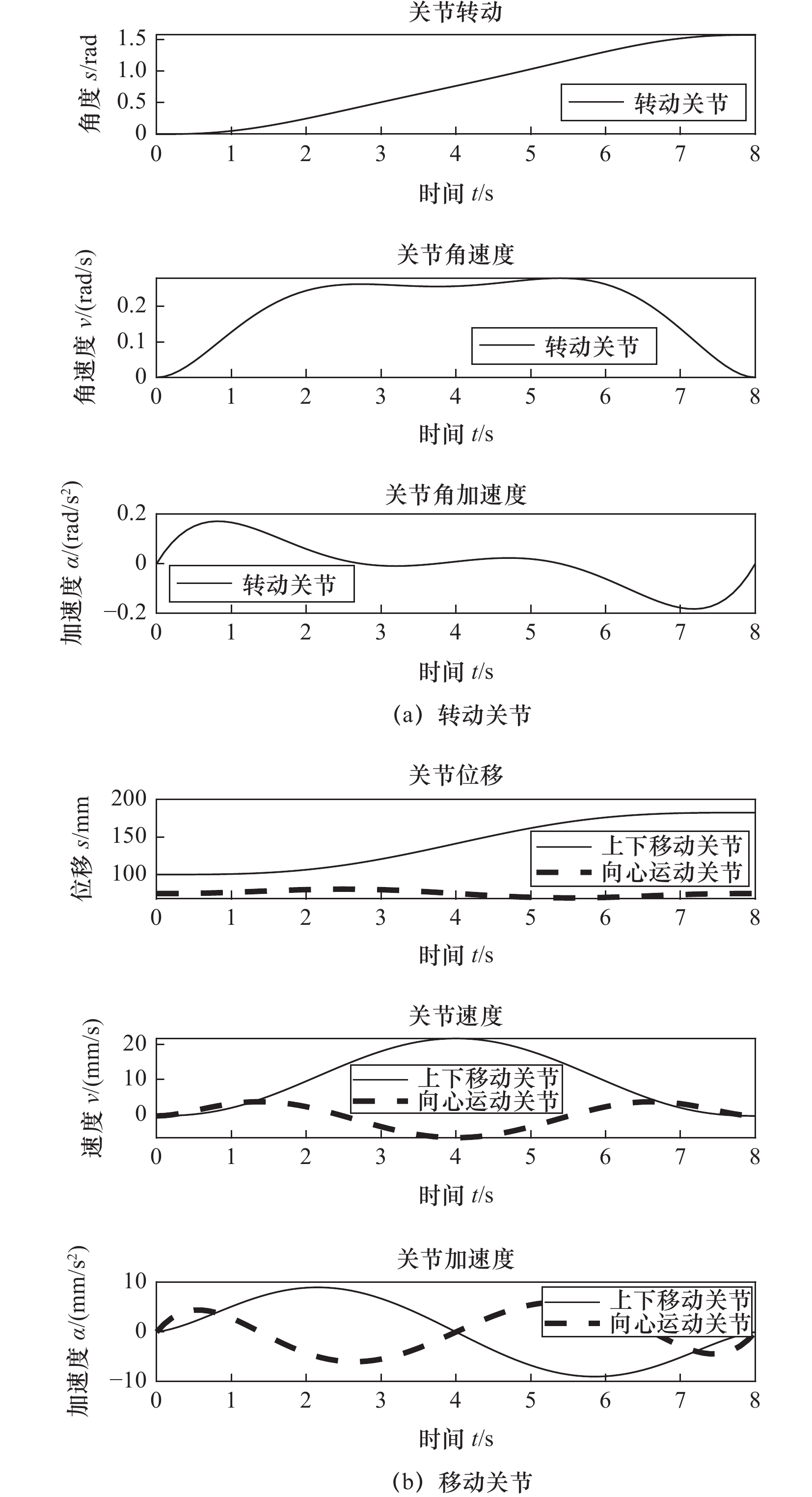
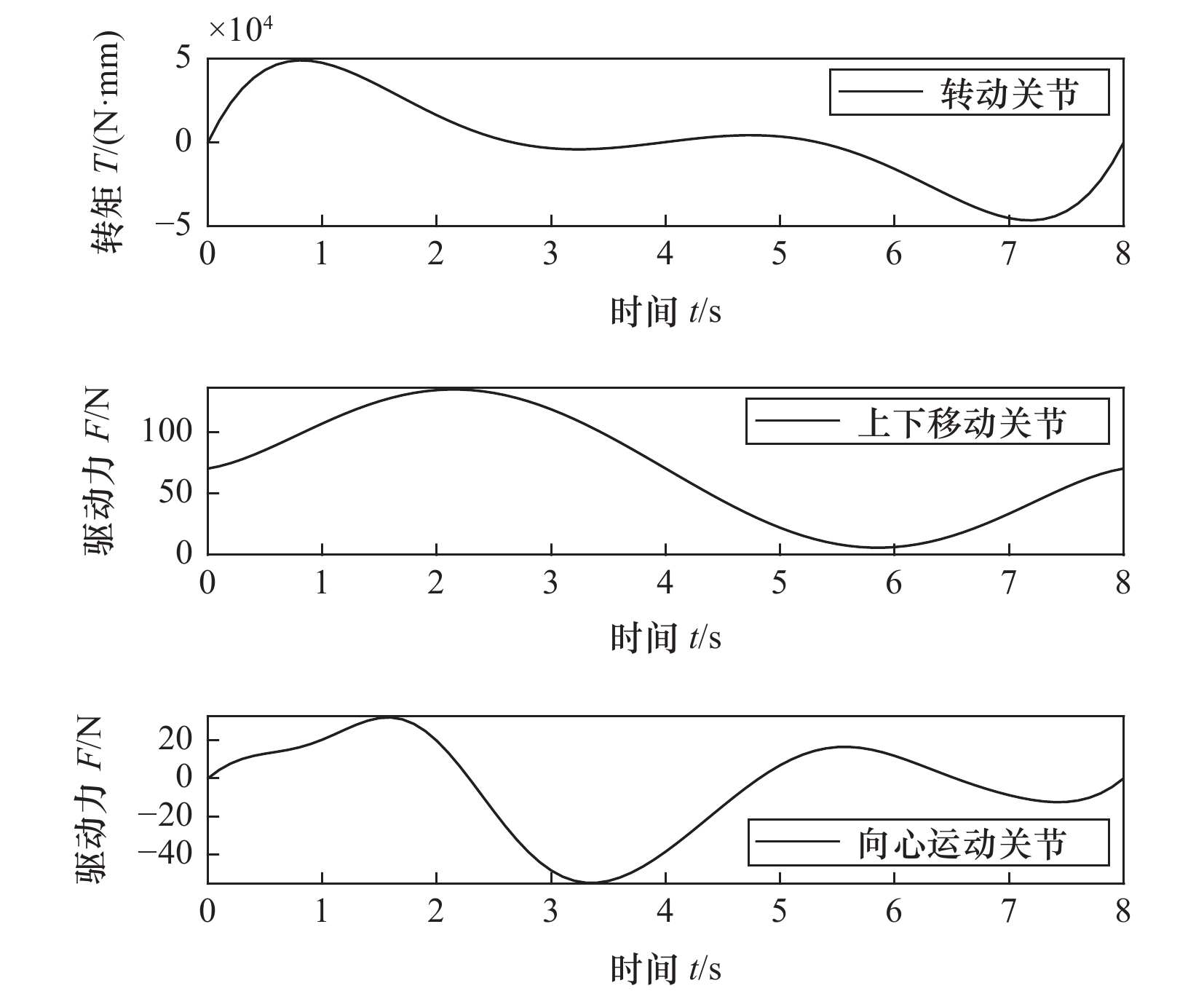
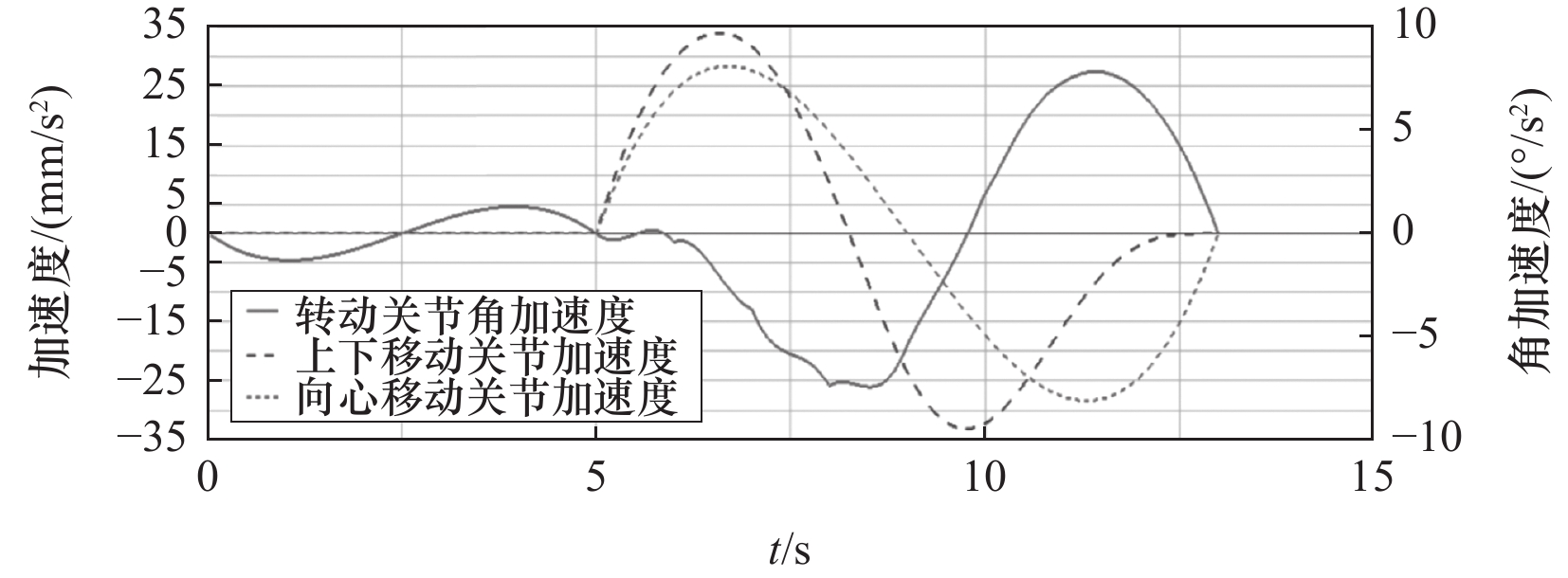
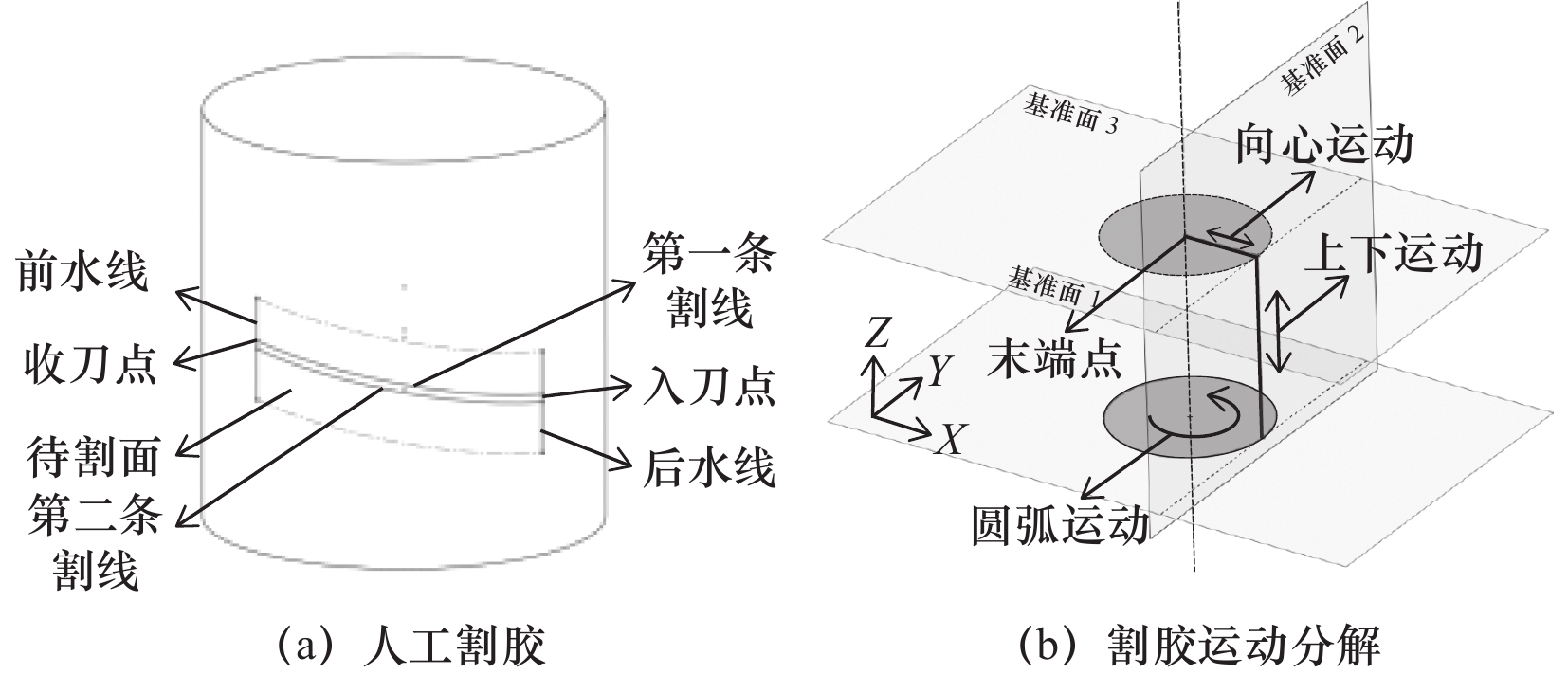
摘要: 针对人工割胶劳动强度大、技术要求高和作业效率低等问题,设计了一种具有三自由度的新型固定式割胶机。通过等效法将该机构等效为RPP模型,分别利用D-H坐标法、蒙特卡洛数值分析法和Lagrange动力学方法对机构进行运动学及动力学分析。通过仿真验证该割胶机的运行状况。结果表明:新型固定式割胶机各关节位置、速度、加速度、转矩和驱动力随时间变化呈平滑曲线,并且可实现预计轨迹。Abstract: Aiming at the problems of high labor intensity, high technical requirements and low operation efficiency of manual rubber tapping, a new fixed rubber tapping machine with three degrees of freedom is designed. The device is equivalent to the RPP model, the kinematics and the dynamics of the device are analyzed by the D-H coordinate method, the Monte Carlo numerical analysis method and the Lagrange dynamic method respectively. The operation status of the rubber tapping machine is verified by simulation. The results show that the position, speed, acceleration, torque and driving force of each joint of the new fixed rubber tapping machine show a smooth curve with time, and the predicted trajectory can be achieved.
-
Key words:
- fixed tapping robot /
- workspace analysis /
- kinematics /
- dynamics
-

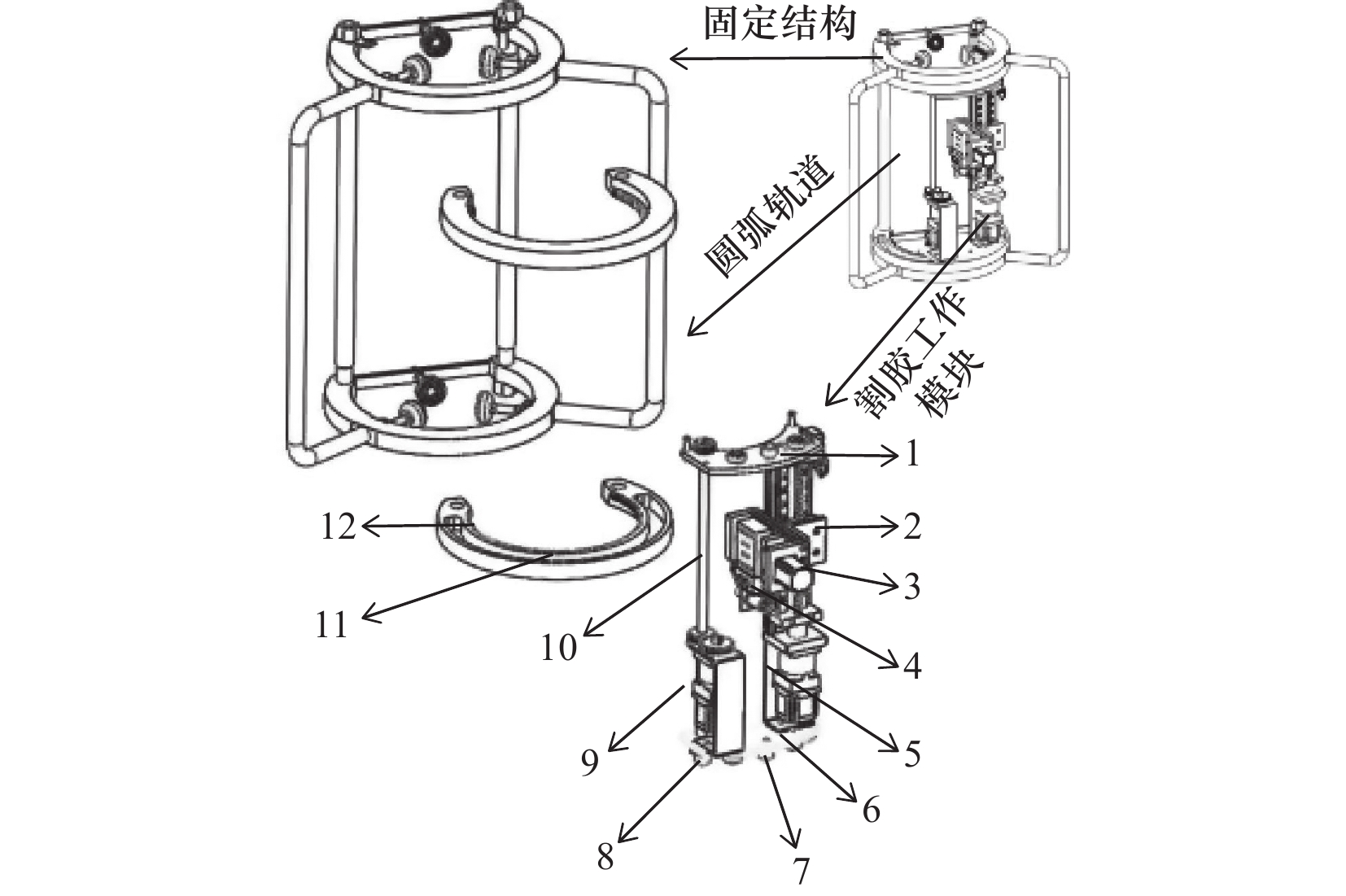
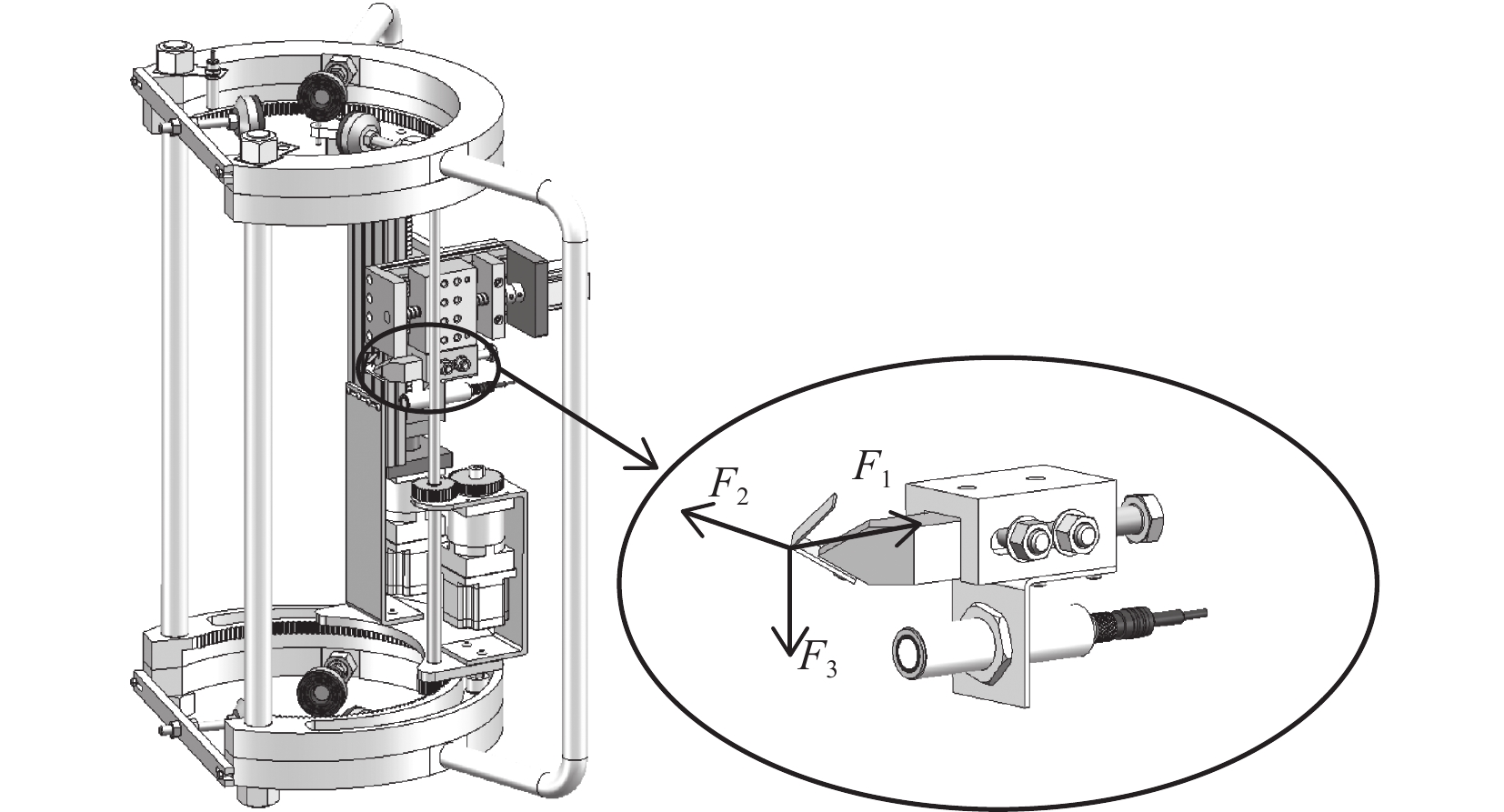
图 2 固定式割胶机
1—上顶板; 2—L型板; 3、5—丝杠传动模块; 4—胶刀模块; 6—下底板; 7—滚轮(上下);8—传动齿轮;9—传动齿轮组; 10—运动转轴; 11—“凹”字型轨道; 12—内齿圈。
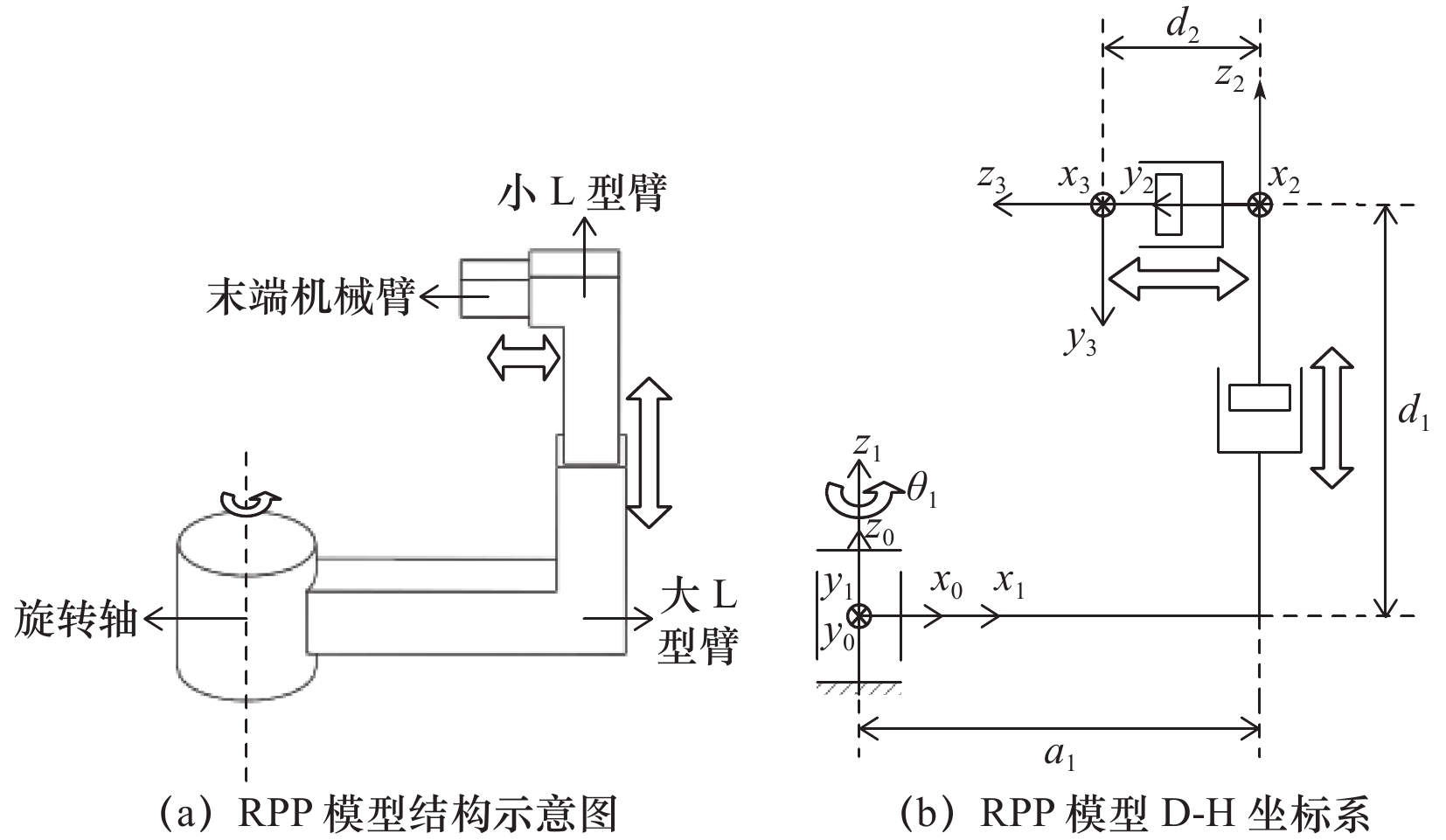
表 1 RPP串联机构D-H参数表
连杆序号
$ \mathit{i} $关节变量
$ {\mathit{\theta }}_{\mathit{i}} $/(°)连杆长度
$ {\mathit{a}}_{{\mathit{i}}-1} $/mm扭角
$ {\mathit{\alpha }}_{\mathit{i}-1} $/(°)偏置
$ {\mathit{d}}_{\mathit{i}} $/mm连杆1 $ \theta $ 0 0 0 连杆2 90 $ l $ 0 $ {h}_{1} $ 连杆3 0 0 −90 $ {h}_{2} $  下载: 导出CSV
下载: 导出CSV
-
[1] 曾霞, 黄华孙. 我国天然橡胶技术发展现状与展望[J]. 中国热带农业, 2021(1): 25-30. [2] 陈圣文, 毛新翠. 世界天然橡胶产业发展研究分析报告[J]. 中国热带农业, 2020(1): 29-34,59. doi: 10.3969/j.issn.1673-0658.2020.01.008 [3] 金华斌, 田维敏, 史敏晶. 我国天然橡胶产业发展概况及现状分析[J]. 热带农业科学, 2017, 37(5): 98-104. [4] 黄华, 魏博, 张迪, 等. 割胶设备发展现状与趋势[J]. 农业工程, 2018, 8(6): 16-20. doi: 10.3969/j.issn.2095-1795.2018.06.004 [5] 钟勇. 海南橡胶种植业发展前景分析[J]. 热带农业科学, 2016, 36(8): 69-75. [6] 曹建华, 张以山, 王玲玲, 等. 天然橡胶便携式采胶机械研究[J]. 中国农机化学报, 2020, 41(8): 20-27. [7] Soumya S J, Vishnu R S, Arjun R N, et al. Design and testing of a semi automatic rubber tree tapping machine (SART)[C]. Agra: 2016 IEEE Region 10 Humanitarian Technology Conference (R10-HTC). IEEE, 2017. [8] 汝绍锋, 李梓豪, 梁栋, 等. 天然橡胶树割胶技术的研究及进展[J]. 中国农机化学报, 2018, 39(2): 27-31. [9] 周航, 张顺路, 翟毅豪, 等. 天然橡胶割胶机器人视觉伺服控制方法与割胶试验[J]. 智慧农业, 2020, 2(4): 56-64. [10] 张春龙, 李德程, 张顺路, 等. 基于激光测距的三坐标联动割胶装置设计与试验[J]. 农业机械学报, 2019, 50(3): 121-127. doi: 10.6041/j.issn.1000-1298.2019.03.012 [11] 许振昆, 吴纪营, 张兴明. 一种割胶机及割胶方法: 中国, CN106034978A [P]. 2016-10-26. [12] 吴米. 全自动橡胶割胶机研制与关键技术研究[D]. 湛江: 广东海洋大学, 2019. [13] 张俊雄, 张顺路, 王大帅, 等. 一种悬挂式割胶装置及机械化割胶方法: 中国, CN107466801A[P]. 2017-12-15 [14] 韩青江. 一种自动割胶机器人: 中国, CN106605571A[P]. 2017-05-03 [15] 魏小弟. 我国割胶生产技术现状和建议[J]. 中国热带农业, 2010(2): 5-7. doi: 10.3969/j.issn.1673-0658.2010.02.003 [16] 南风. 橡胶割胶新技术要点[J]. 农村实用技术, 2013(2): 44-45. [17] 郭彤颖, 安冬. 机器人学及其智能控制[M]. 北京: 人民邮电出版社, 2014 : 213. [18] 高艺, 马国庆, 于正林, 等. 一种六自由度工业机器人运动学分析及三维可视化仿真[J]. 中国机械工程, 2016, 27(13): 1726-1731. doi: 10.3969/j.issn.1004-132X.2016.13.005 [19] 王智杰, 杜宇凡, 杨沫, 等. 基于MATLAB Robotics Toolbox的Dobot机械臂运动规划[J]. 机械研究与应用, 2021, 34(2): 49-51. [20] Antonov A, Glazunov V. Position, velocity, and workspace analysis of a novel 6-DOF parallel manipulator with “piercing” rods[J]. Mechanism and Machine Theory, 2021, 161(3): 104300. [21] Ao J, Xiang Y, Ming C, et al. Kinematics analysis and experiment of a lily picking mechanical arm[J]. The Journal of Engineering, 2018, 2018 (16): 1674-1681. [22] 马丛俊, 赵涛, 向国菲, 等. 基于逆运动学的柔性机械臂末端定位控制[J]. 机械工程学报, 2021, 57(13): 163-171. [23] 王晓磊, 金振林, 李晓丹, 等. 串并混联四足仿生机器人动力学建模与分析[J]. 农业机械学报, 2019, 50(4): 401-412. doi: 10.6041/j.issn.1000-1298.2019.04.046 -

 下载:
下载:

 点击查看大图
点击查看大图
图(8) / 表(1)
计量
- 文章访问数: 72
- HTML全文浏览量: 40
- PDF下载量: 49
- 被引次数: 0


