

Configuration design and branch chain stiffness analysis of 4-URU fully compliant parallel mechanism
-
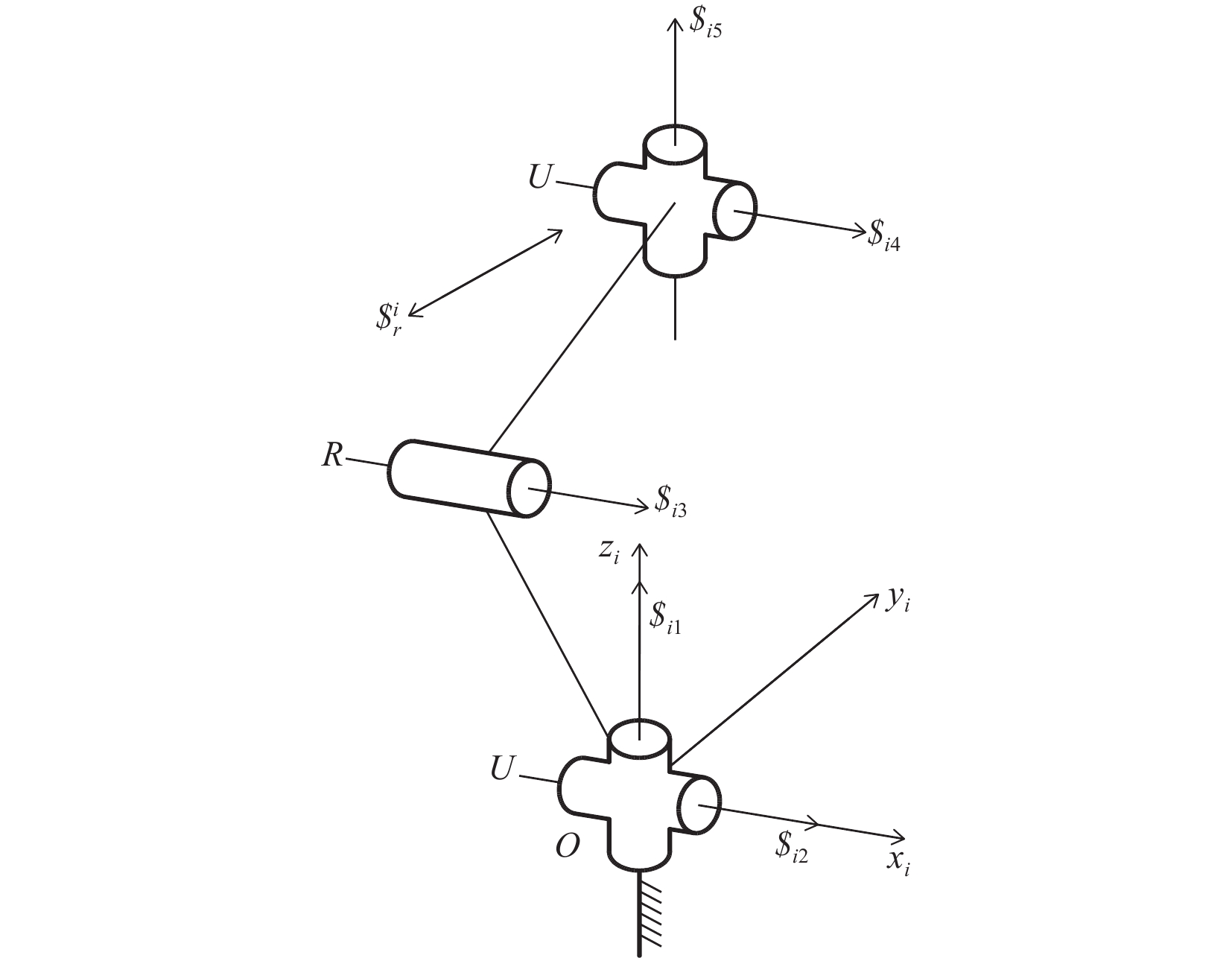
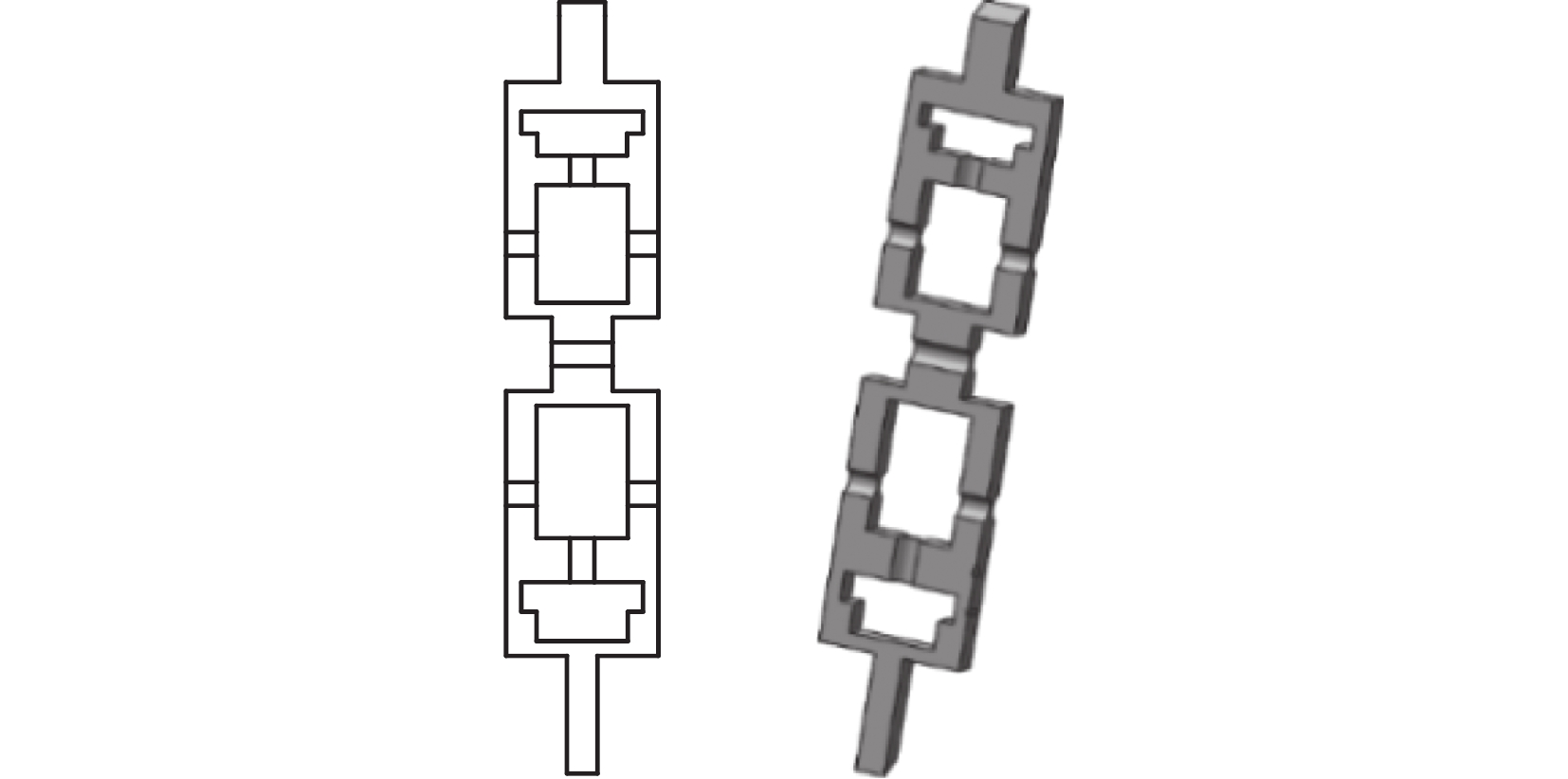
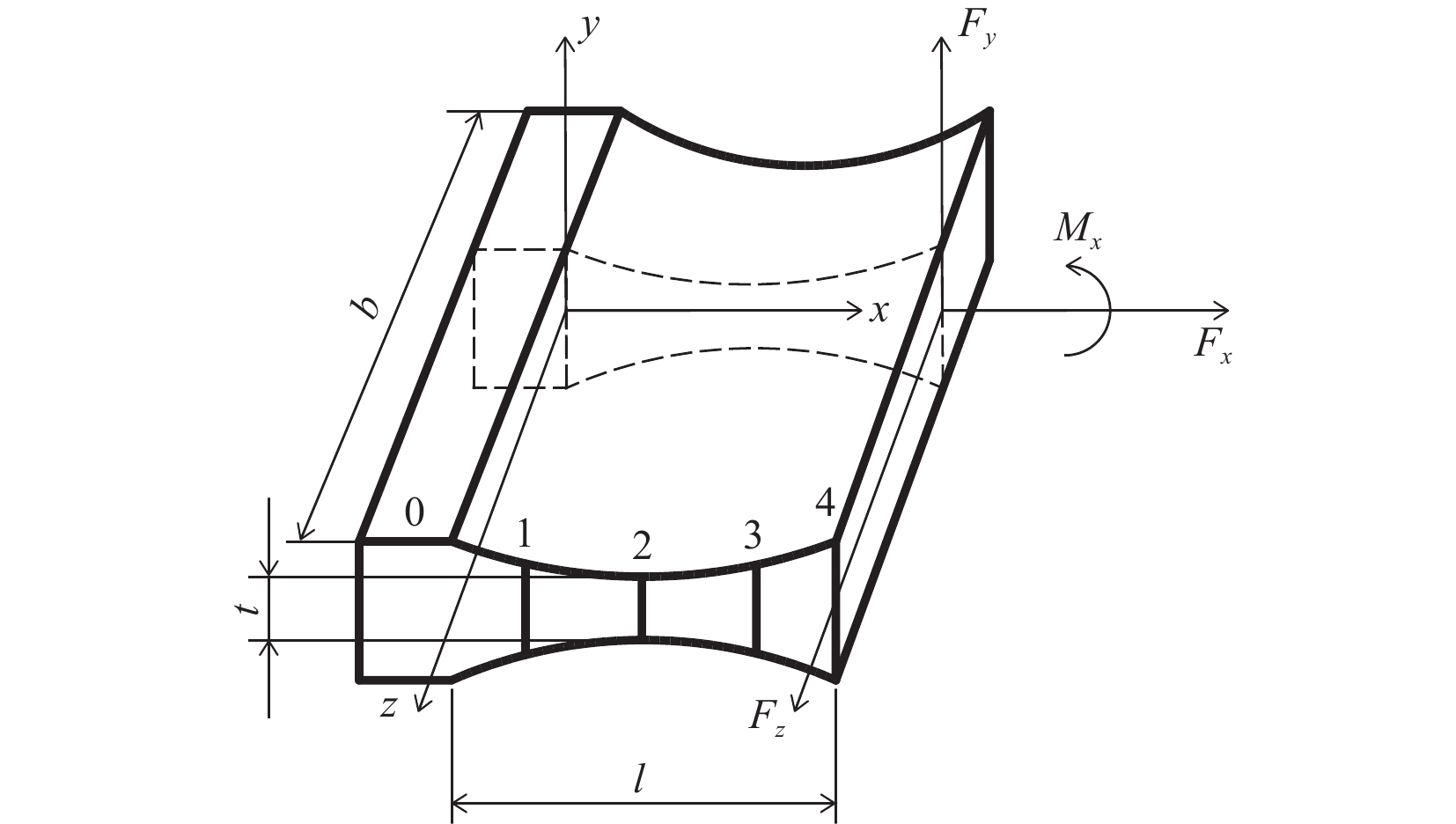
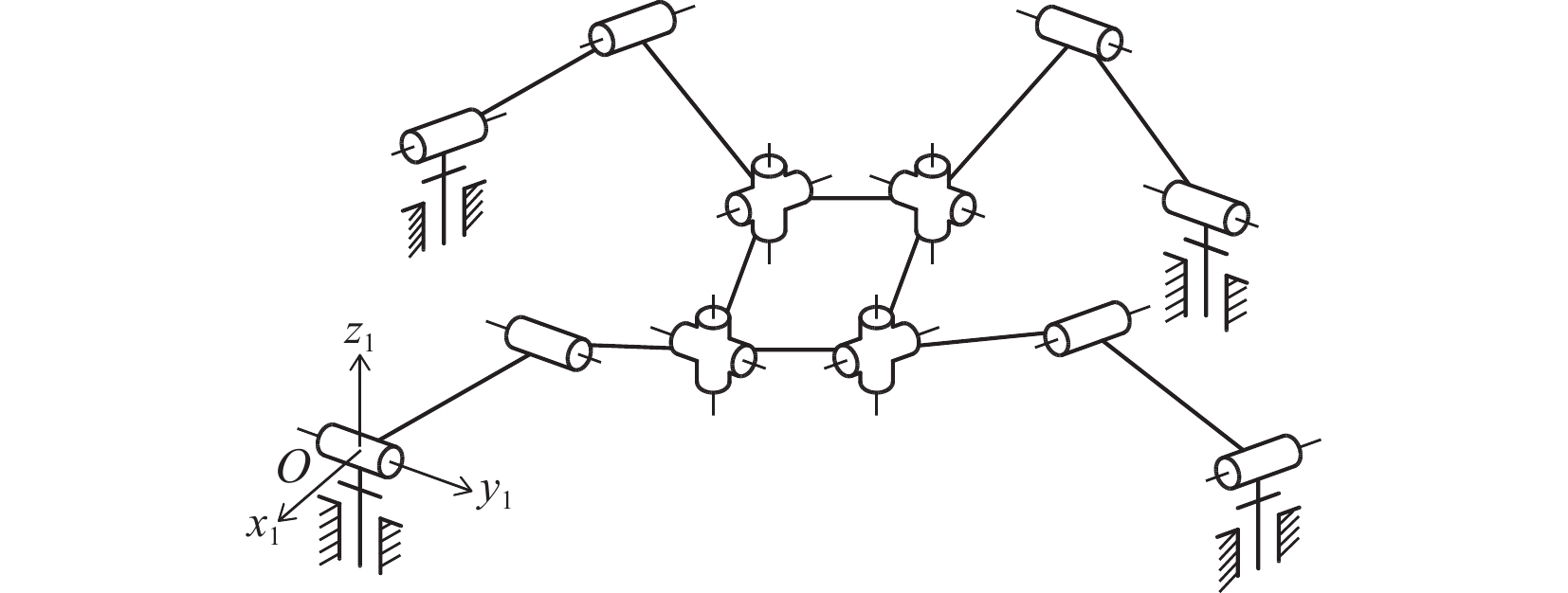
摘要: 针对4-URU型柔性并联机构,提出了一种对支链刚度的新型求解方法,应用软件仿真结果验证该方法的有效性。首先,利用螺旋理论对4-URU刚性并联机构进行自由度分析,采用柔性铰链替换法设计相应的柔性并联机构。基于柔性铰链刚度矩阵,利用转换矩阵法求得支链的铰链刚度矩阵,利用有限元理论分别求得支链各柔性杆刚度,通过线性叠加求得支链的总刚度矩阵,最后利用MATLAB进行理论计算,得到支链在X、Y、Z方向产生的变形量。并用ANSYS软件对模型进行仿真分析,结果表明,理论计算与仿真结果基本一致。验证了该方法求解支链刚度的有效性,为利用该方法求解整个柔性并联机构的刚度提供理论依据,为研究柔性并联定位平台的精度提供了帮助。Abstract: A new method for solving the branch chain stiffness of 4-URU type flexible parallel mechanism was proposed, and the effectiveness of the method was verified by software simulation results. Firstly, the degree of freedom of the 4-URU rigid parallel mechanism was analyzed by using the screw theory, and the corresponding flexible parallel mechanism was designed by using the flexible hinge replacement method. Based on the flexible hinge stiffness matrix, the hinge stiffness matrix of the branch chain was obtained by the transformation matrix method, the stiffness of each flexible rod of the branch chain was obtained by the finite element theory, and the total stiffness matrix of the branch chain was obtained by linear superposition. Finally, the deformation of the branch chain in the X, Y and Z directions was obtained by theoretical calculation with MATLAB. The model is simulated and analyzed by ANSYS software, and the results show that the theoretical calculation is basically consistent with the simulation results. Effectiveness of the method to solve the stiffness of branch chain is verified, which provides a theoretical basis for solving the stiffness of the whole flexible parallel mechanism by using the method, and helps to study the precision of the flexible parallel positioning platform.
-
[1] Cyril Quennouelle, Clément Gosselin. Kinematostatic modeling of compliant parallel mechanisms[J]. Meccanica, 2011, 46: 155-169. doi: 10.1007/s11012-010-9408-7 [2] Kee-Bong Choi, Jae Jong Lee, Gee Hong Kim, et al. A compliant parallel mechanism with flexure-based joint chains for two translations[J]. International Journal of Precision Engineering and Manufacturing, 2012, 13(9): 1625-1632. doi: 10.1007/s12541-012-0213-1 [3] 高峰. 机构学研究现状与发展趋势的思考[J]. 机械工程学报, 2005, 41(8): 3-17. doi: 10.3321/j.issn:0577-6686.2005.08.002 [4] 王雯静, 余跃庆, 王华伟. 柔顺机构国内外研究现状分析[J]. 机械设计, 2007(6): 1-4. doi: 10.3969/j.issn.1001-2354.2007.06.001 [5] 康利君, 李瑞琴. 一种新型柔顺机构设计方法的研究[J]. 机械设计与制造, 2013(3): 7-10. doi: 10.3969/j.issn.1001-3997.2013.03.003 [6] Wang R , Wu H , Wang H, et al. Design and stiffness modeling of a four-degree-of-freedom nanopositioning stage based on six-branched-chain compliant parallel mechanisms[J]. The Review of Scientific Instruments, 2020, 91(6): 065002. doi: 10.1063/5.0008905 [7] Yu Hongtao, Zhang Chi, Yang Bao, et al. The design and kinetostatic modeling of 3PPR planar compliant parallel mechanism based on compliance matrix method[J]. The Review of Scientific Instruments, 2019, 90(4): 045102. doi: 10.1063/1.5080252 [8] 吴小川. 新型六自由度柔顺并联机构研究[D]. 西安: 西安电子科技大学, 2019. [9] 孙慧. 3-RPC定位机构结构设计[J]. 机械设计与制造, 2018(6): 192-195. doi: 10.3969/j.issn.1001-3997.2018.06.051 [10] 黄真, 赵永生, 赵铁石. 高等空间机构学[M]. 北京: 高教出版社, 2006: 125-131. [11] 杨启志, 马履中, 郭宗和, 等. 全柔性并联机器人支链静刚度矩阵的建立[J]. 中国机械工程, 2008, 19(10): 1156-1159. doi: 10.3321/j.issn:1004-132X.2008.10.006 [12] 杨启志, 尹小琴, 马履中, 等. 数值法建立单向柔性铰链的刚度矩阵[J]. 农业机械学报, 2005(1): 104-107. doi: 10.3969/j.issn.1000-1298.2005.01.028 [13] 李培. 空间四自由度全柔顺并联机构精密定位平台的刚度分析[D]. 赣州: 江西理工大学, 2013: 19-21. -

 下载:
下载:




 点击查看大图
点击查看大图
图(7)
计量
- 文章访问数: 155
- HTML全文浏览量: 24
- PDF下载量: 36
- 被引次数: 0


