

Point cloud error compensation method for stereo structured light 3D reconstruction system
-
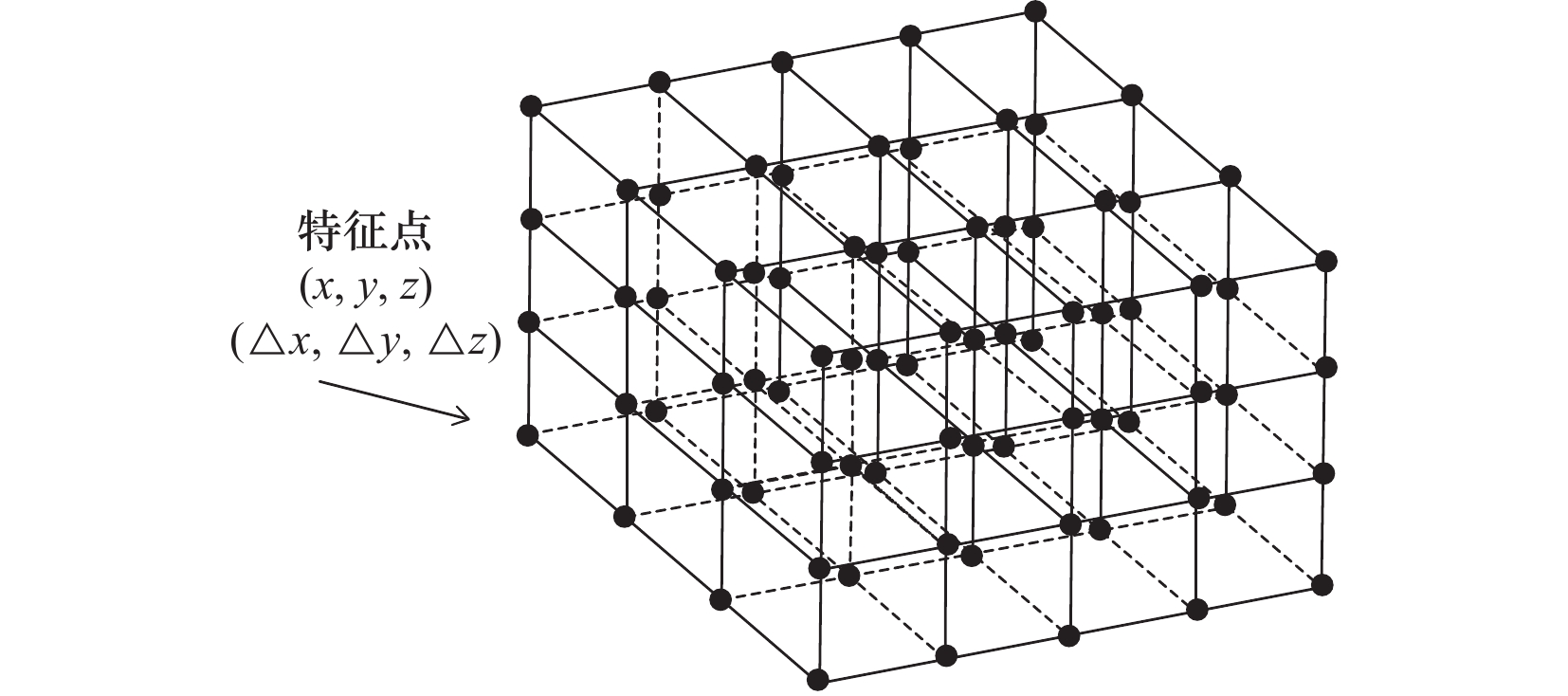
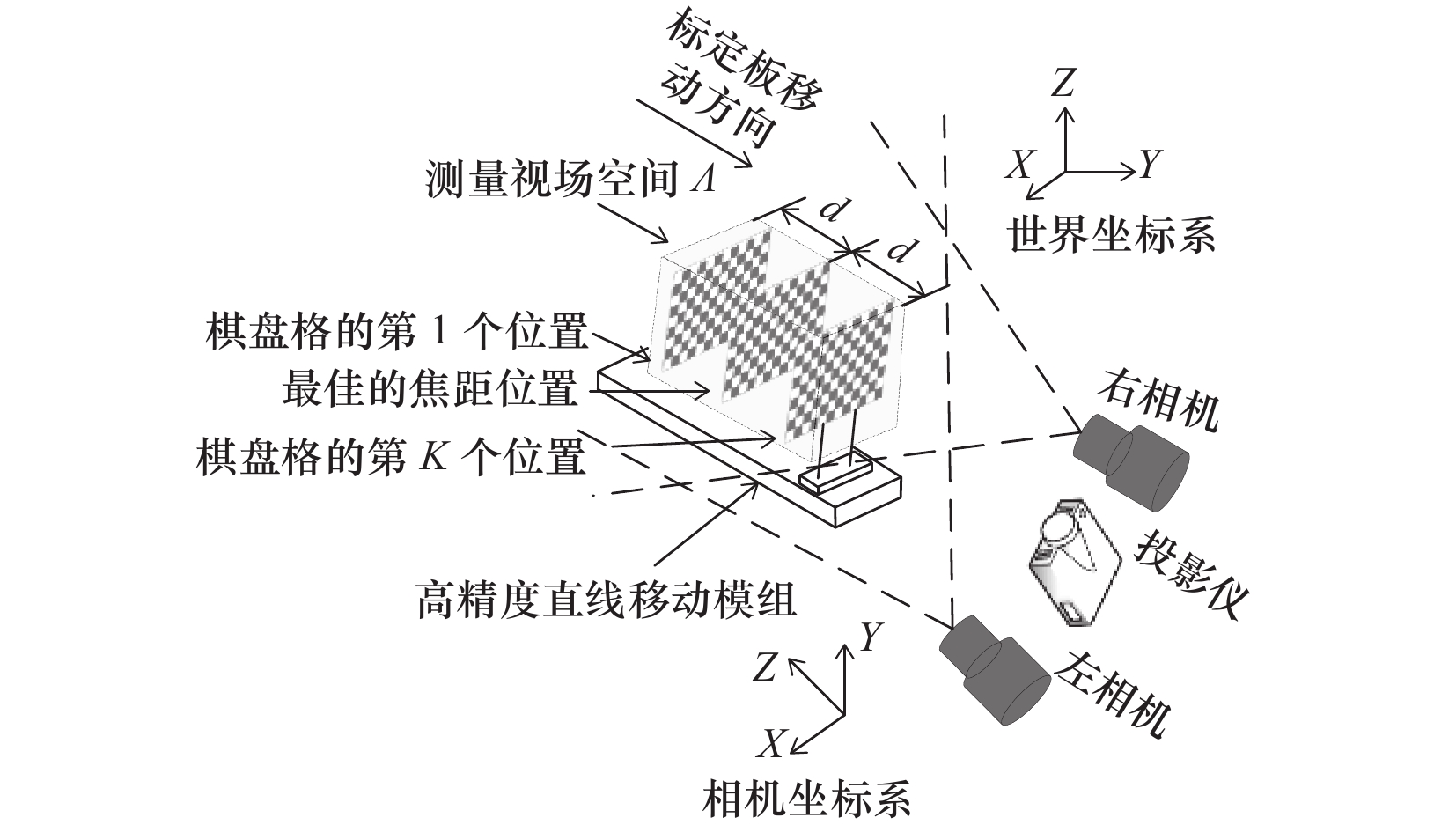
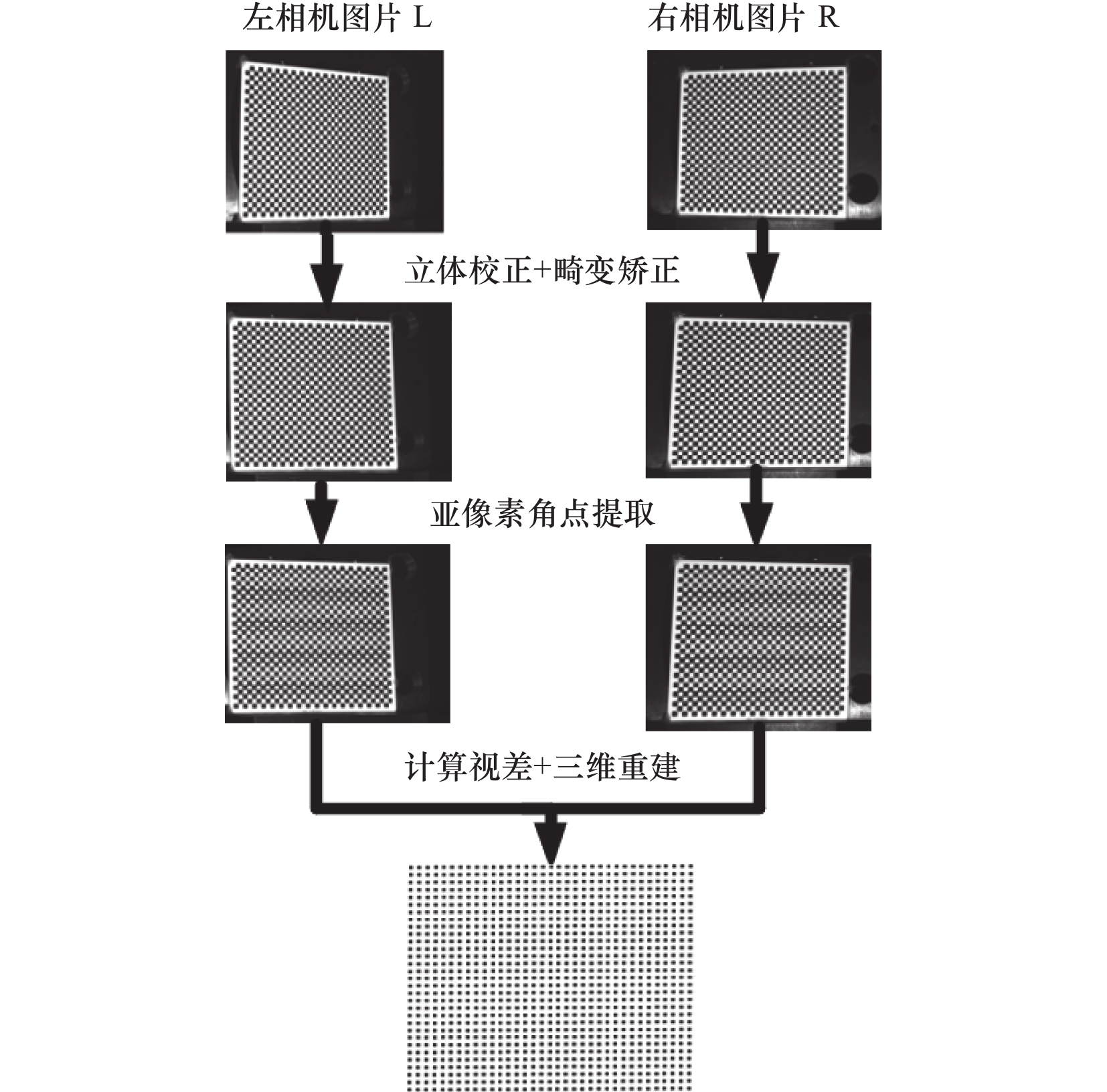
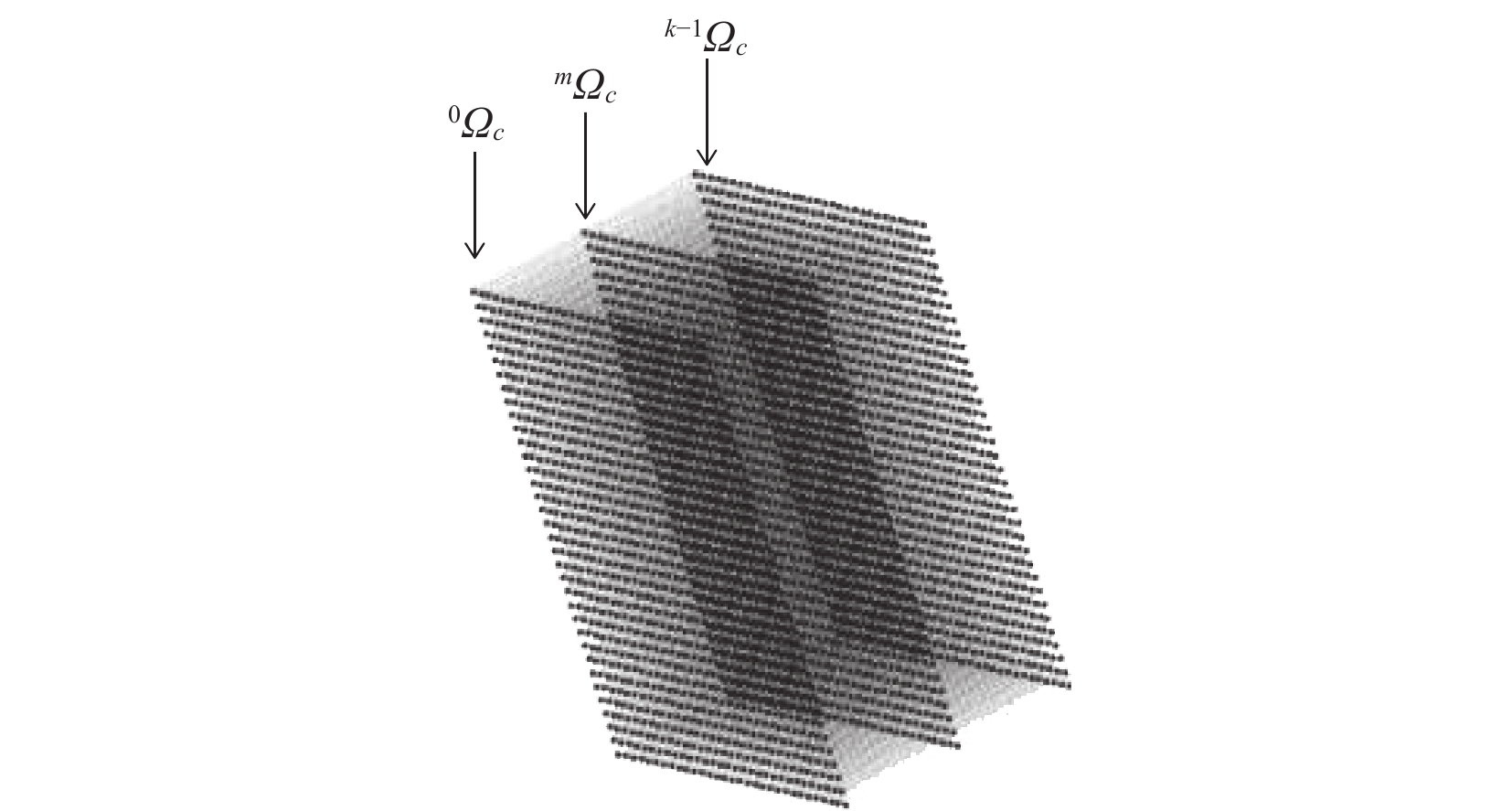
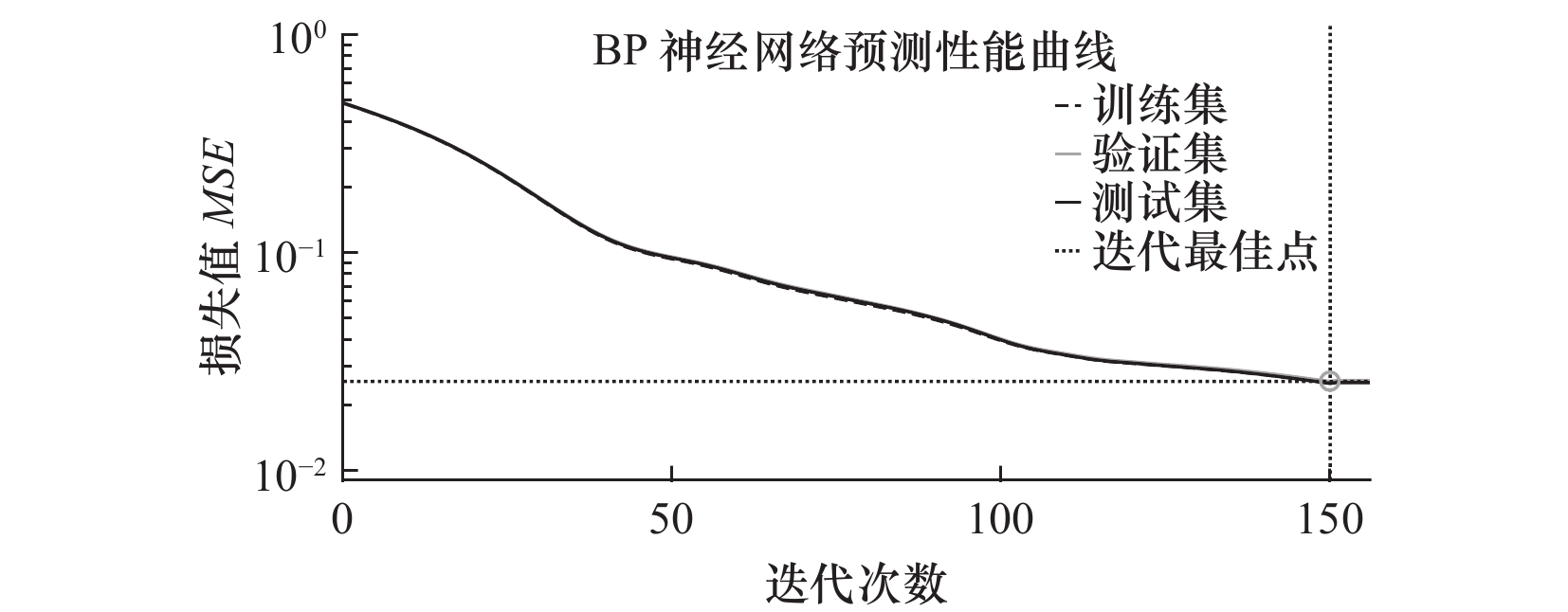
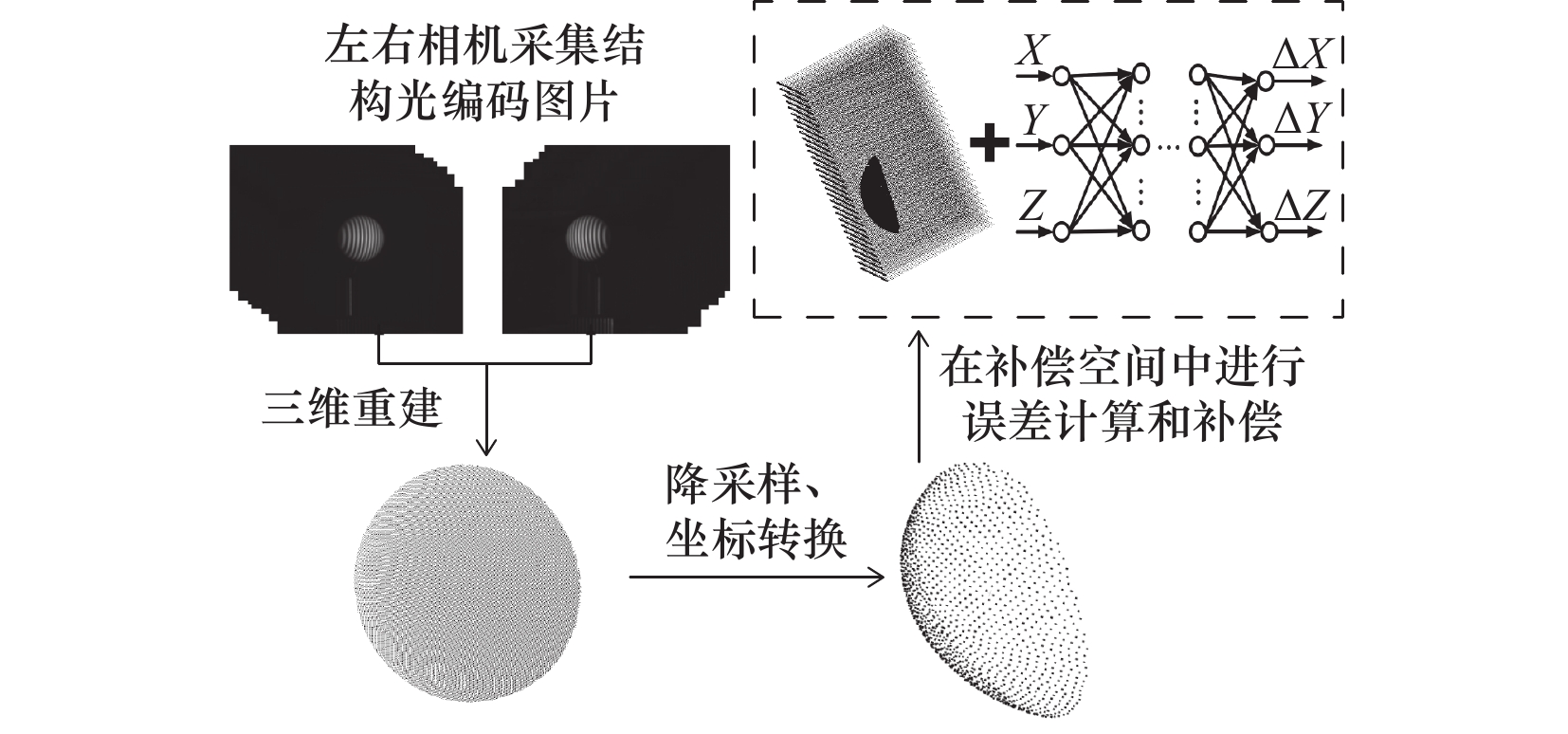
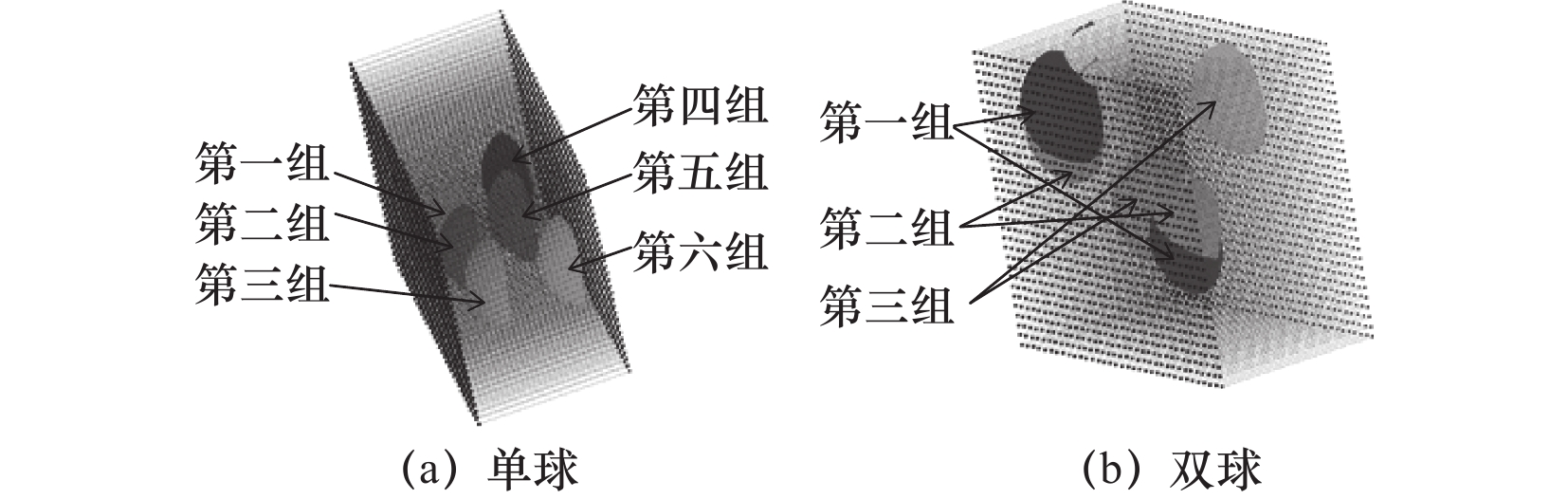
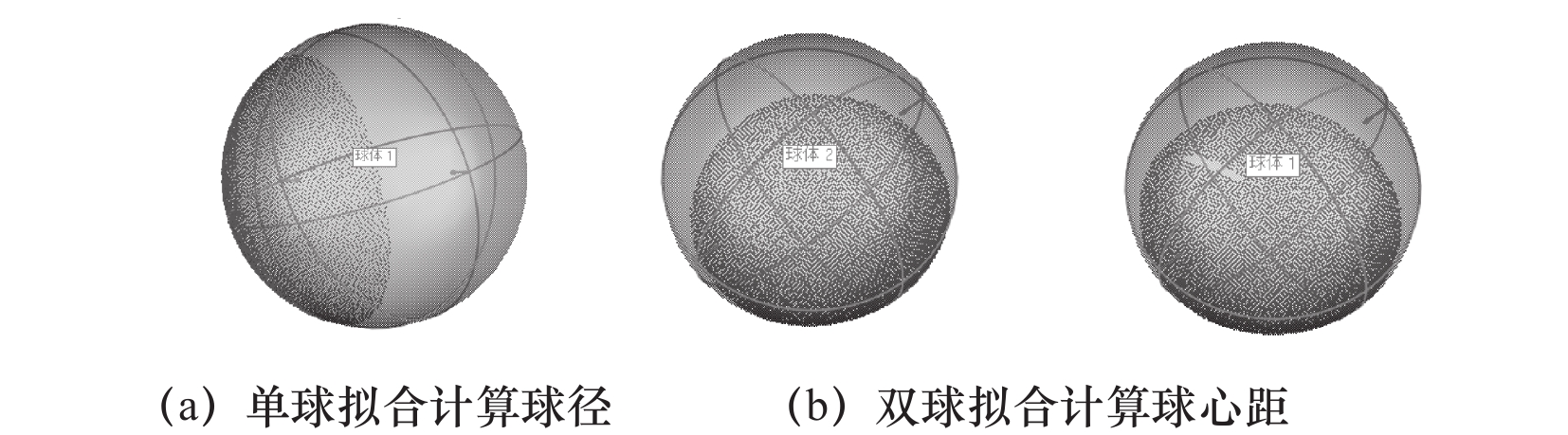
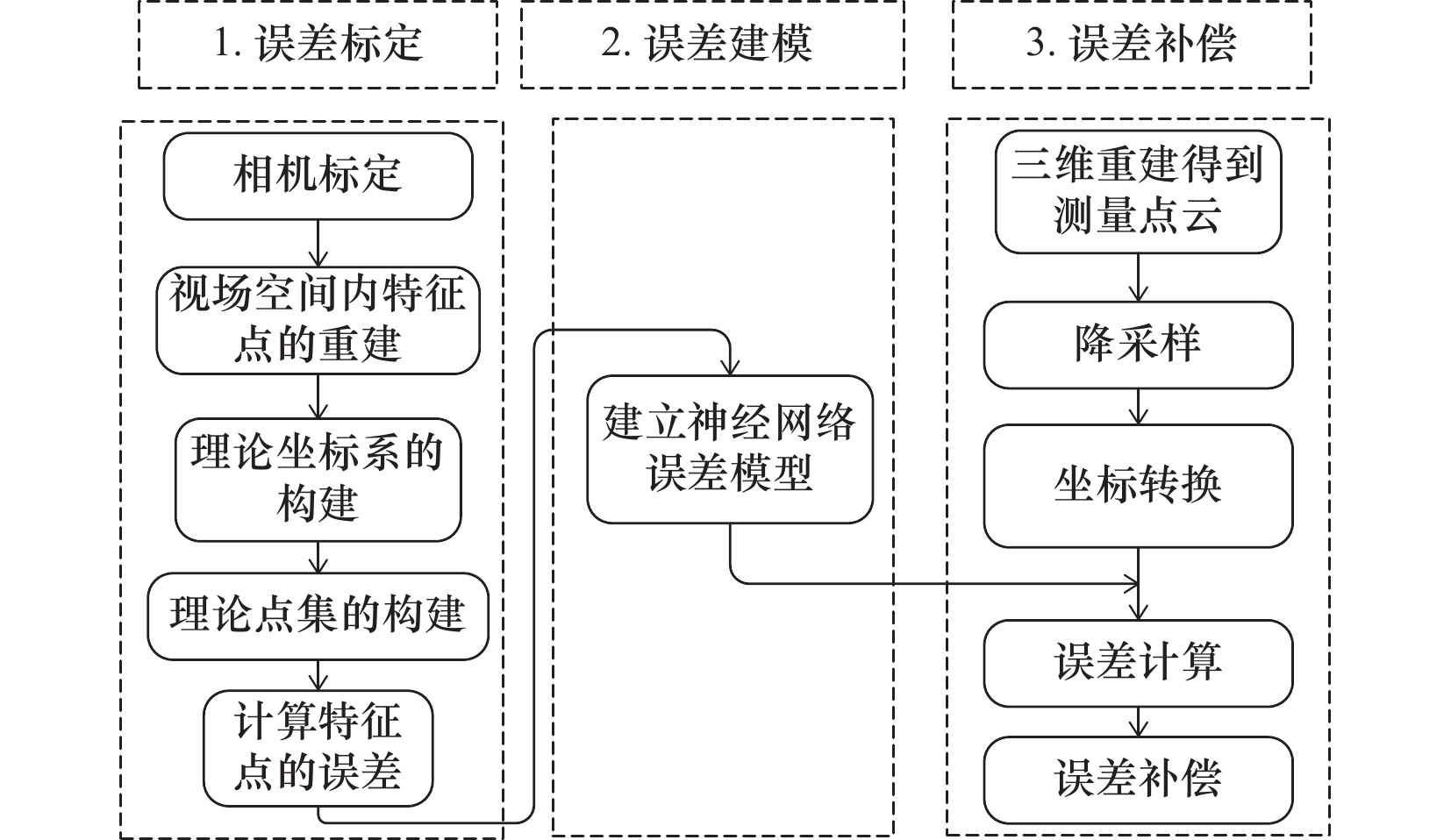
摘要: 为了提高立体视觉结构光三维重建系统的精度,提出了一种面向立体视觉结构光三维重建系统的点云误差补偿方法,该方法分为误差标定、误差建模和误差补偿三部分。首先,提出一种新的误差标定方法,将立体视觉结构光系统的测量空间划分为离散的特征点并标定了整个空间内特征点的误差;然后,提出了基于神经网络的误差建模方法,建立起该空间的误差模型;最后,提出了适用于立体视觉结构光系统的点云误差补偿方法,将建立的误差模型用于误差补偿。实验表明文章提出的误差补偿方法平均减少了51.96%的直径误差和14.16%的球心距误差,精度提升效果明显。从而,验证了该算法的有效性和可行性。Abstract: In order to improve the accuracy of stereo structured light 3D reconstruction system, a point cloud error compensation method is proposed. The method is divided into three parts: error calibration, error modeling and error compensation. Firstly, a new error calibration method is proposed, which divides the measurement space of stereo vision structured light system into discrete feature points, and calibrates the error of feature points in the whole space. Secondly, the error modeling method based on neural network is proposed, and the error model of this space is established. Finally, a point cloud error compensation method suitable for stereo vision structured light system is proposed. After experiments, it is proved that the proposed error compensation method reduces the diameter error by 51.96% and the sphere center distance error by 14.16%, respectively. The effectiveness and feasibility of this algorithm are also verified.
-
Key words:
- stereo structured vision /
- error compensation /
- 3D reconstruction
-
表 1 参数列表
相机 分辨率 1 280×1 024 投影仪 分辨率 1 920×1 080 计算机 系统 Windows 64 CPU i7-9750H 内存/G 16 直线电机 重复定位精度/μm 0.3 标定板 格子大小/mm 3 尺寸精度/μm 1 格子数量 35×31  下载: 导出CSV
下载: 导出CSV
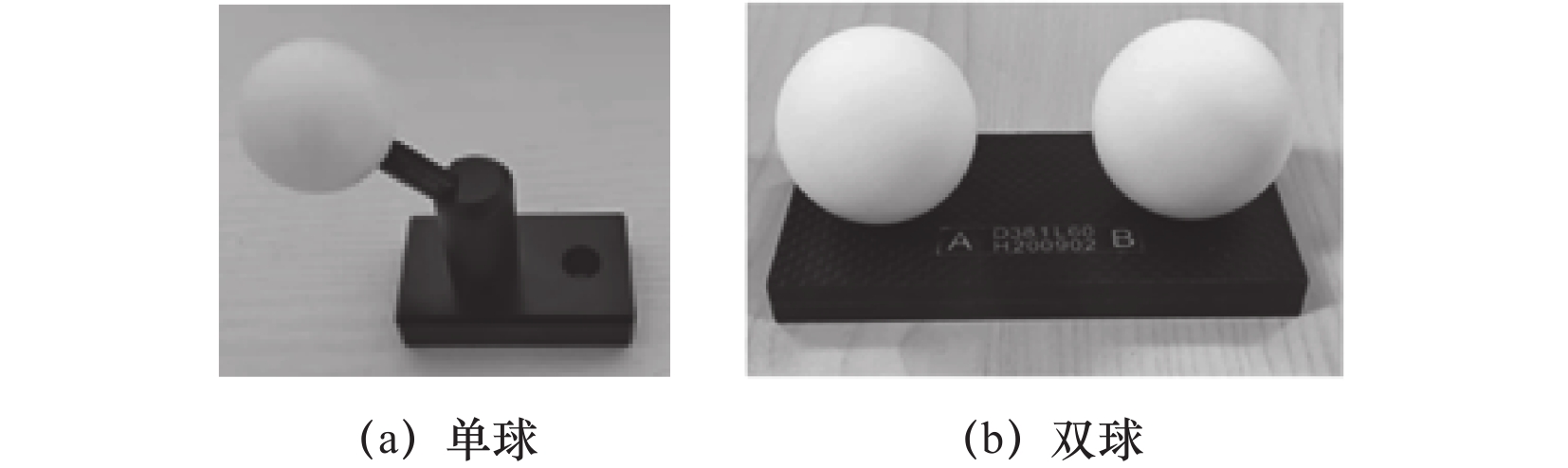
表 2 误差补偿前后的球直径误差对比
序号 误差补
偿前球
直径/mm误差补
偿后球
直径/mm误差补偿
前绝对
误差/mm误差补偿
后绝对
误差/mm补偿后误
差减少
率/(%)1 38.129 8 38.116 3 0.025 2 0.011 7 53.57 2 38.136 7 38.124 5 0.032 1 0.019 9 38.01 3 38.123 9 38.112 4 0.019 3 0.007 8 59.59 4 38.137 9 38.123 4 0.033 3 0.018 8 43.54 5 38.138 5 38.122 7 0.033 4 0.018 1 45.81 6 38.141 1 38.115 1 0.036 5 0.010 5 71.23
下载: 导出CSV
表 3 误差补偿前后的球心距误差对比
序号 误差补
偿前球
心距/mm误差补
偿后球
心距/mm误差补偿
前绝对
误差/mm误差补偿
后绝对
误差/mm补偿后误
差减少
率/(%)1 59.969 9 59.976 9 0.038 3 0.031 3 18.28 2 60.000 1 60.000 8 0.008 1 0.007 4 8.64 3 59.975 6 59.981 0 0.032 6 0.027 15.56
下载: 导出CSV
-
[1] He W, Zhong K, Li Z, et al. Accurate calibration method for blade 3D shape metrology system integrated by fringe projection profilometry and conoscopic holography[J]. Optics and Lasers in Engineering, 2018, 110: 253-261. doi: 10.1016/j.optlaseng.2018.06.012 [2] Liu J, Liang J, Xiao Z, et al. Development of a large-scale 3D digitizing system for cultural heritage documentation[C]. In 2010 IEEE International Conference on Mechatronics and Automation, ICMA 2010: 1587-1592. [3] Han X, Huang P. Combined stereovision and phase shifting method: a new approach for 3D shape measurement[J]. Proceedings of SPIE - The International Society for Optical Engineering, 2009, 7389(1): 73893C-73893C-8. [4] Gai S, Da F, Dai X. A novel dual-camera calibration method for 3D optical measurement[J]. Optics and Lasers in Engineering, 2018, 104: 126-134. doi: 10.1016/j.optlaseng.2017.09.025 [5] 卞玉霞, 刘学军, 王美珍, 等. 双目视觉三维点云重建的误差度量模型[J]. 测绘通报, 2017(11): 64-67. [6] Zuo C, Feng S, Huang L, et al. Phase shifting algorithms for fringe projection profilometry: A review[J]. Optics and Lasers in Engineering, 2018, 109: 23-59. doi: 10.1016/j.optlaseng.2018.04.019 [7] Zhang Z. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334. doi: 10.1109/34.888718 [8] Cui Y, Zhou F, Wang Y, et al. Precise calibration of binocular vision system used for vision measurement[J]. Optics Express, 2014, 22(8): 9134. doi: 10.1364/OE.22.009134 [9] Bräuer-Burchardt C, Möller M, Munkelt C, et al. On the accuracy of point correspondence methods in three-dimensional measurement systems using fringe projection[J]. Optical Engineering, 2013, 52(6): 63601. doi: 10.1117/1.OE.52.6.063601 [10] Fooladgar F, Samavi S, Soroushmehr S M R, et al. Geometrical analysis of localization error in stereo vision systems[J]. IEEE Sensors Journal, 2013, 13(11): 4236-4246. doi: 10.1109/JSEN.2013.2264480 [11] Sankowski W, Włodarczyk M, Kacperski D, et al. Estimation of measurement uncertainty in stereo vision system[J]. Image and Vision Computing, 2017, 61: 70-81. doi: 10.1016/j.imavis.2017.02.005 [12] Isa M A, Sims-Waterhouse D, Piano S, et al. Volumetric error modelling of a stereo vision system for error correction in photogrammetric three-dimensional coordinate metrology[J]. Precision Engineering, 2020, 64: 188-199. doi: 10.1016/j.precisioneng.2020.04.010 [13] 纪学军. 数控机床热误差建模及补偿研究[J]. 制造技术与机床, 2017(12): 115-120. [14] 刘宏伟, 陈吉红, 向华. 机床丝杠热误差的测量与补偿研究[J]. 制造技术与机床, 2018(3): 154-156. [15] 张万军, 张峰, 张景轩, 等. 多轴联动的机床交叉耦合轮廓误差补偿技术[J]. 制造技术与机床, 2018(6): 154-159. [16] 向华, 余金舫, 王超, 等. 基于神经网络的机床误差数据拟合与预测方法[J]. 组合机床与自动化加工技术, 2019(12): 44-47. [17] 何剑汇. 基于双目结构光的工件点云构建与多视角配准方法研究[D]. 济南: 山东大学, 2021. [18] Schnabel R, Wahl R, Klein R. Efficient RANSAC for point-cloud shape detection[J]. Computer Graphics Forum, 2007, 26(2): 214-226. doi: 10.1111/j.1467-8659.2007.01016.x [19] 朱德海. 点云库PCL学习教程[M]. 北京: 北京航空航天大学出版社, 2012. -

 下载:
下载:






 点击查看大图
点击查看大图
图(21) / 表(3)
计量
- 文章访问数: 71
- HTML全文浏览量: 13
- PDF下载量: 13
- 被引次数: 0


