

Workspace analysis and structure optimization of parallel robot
-
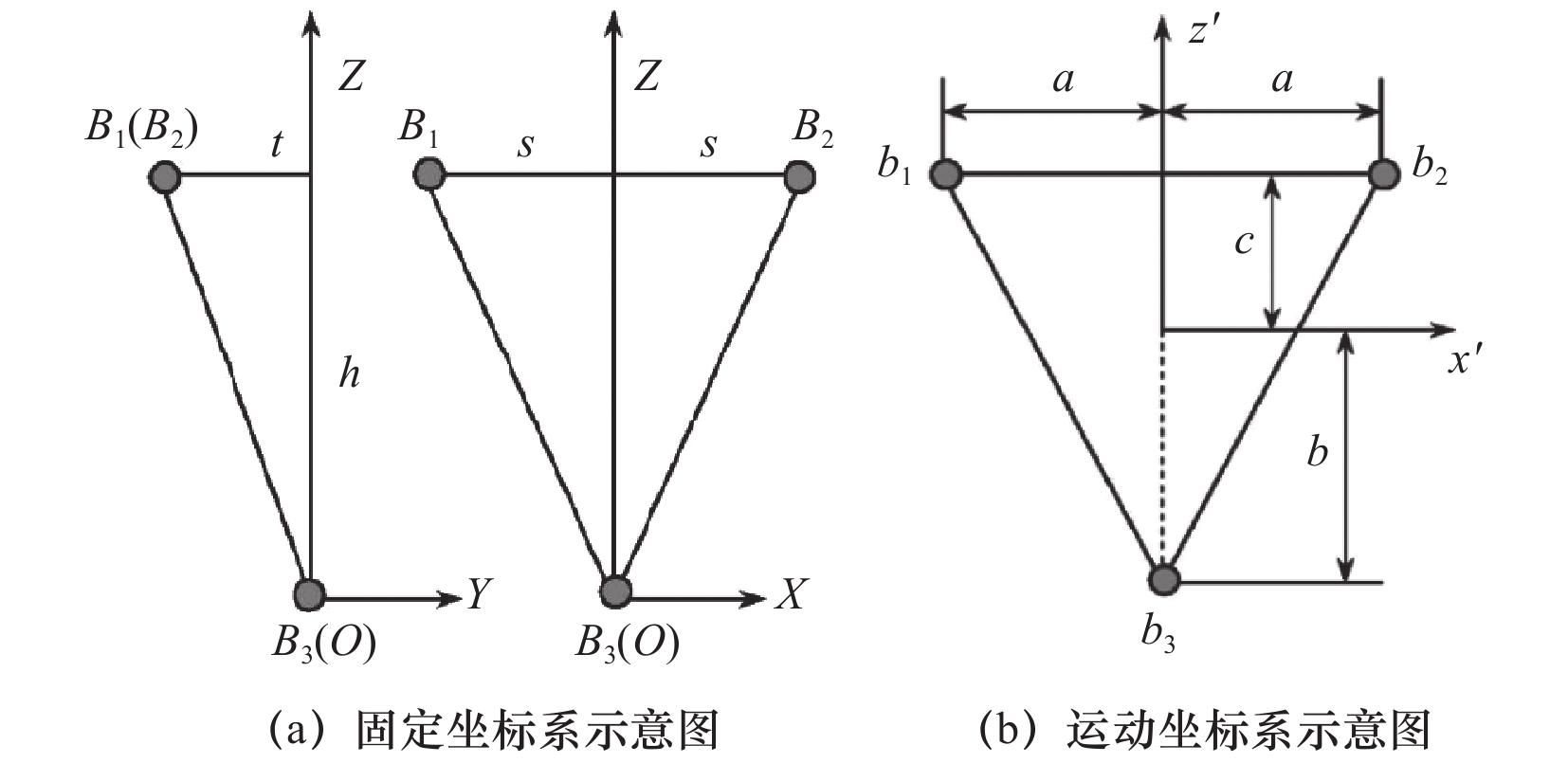
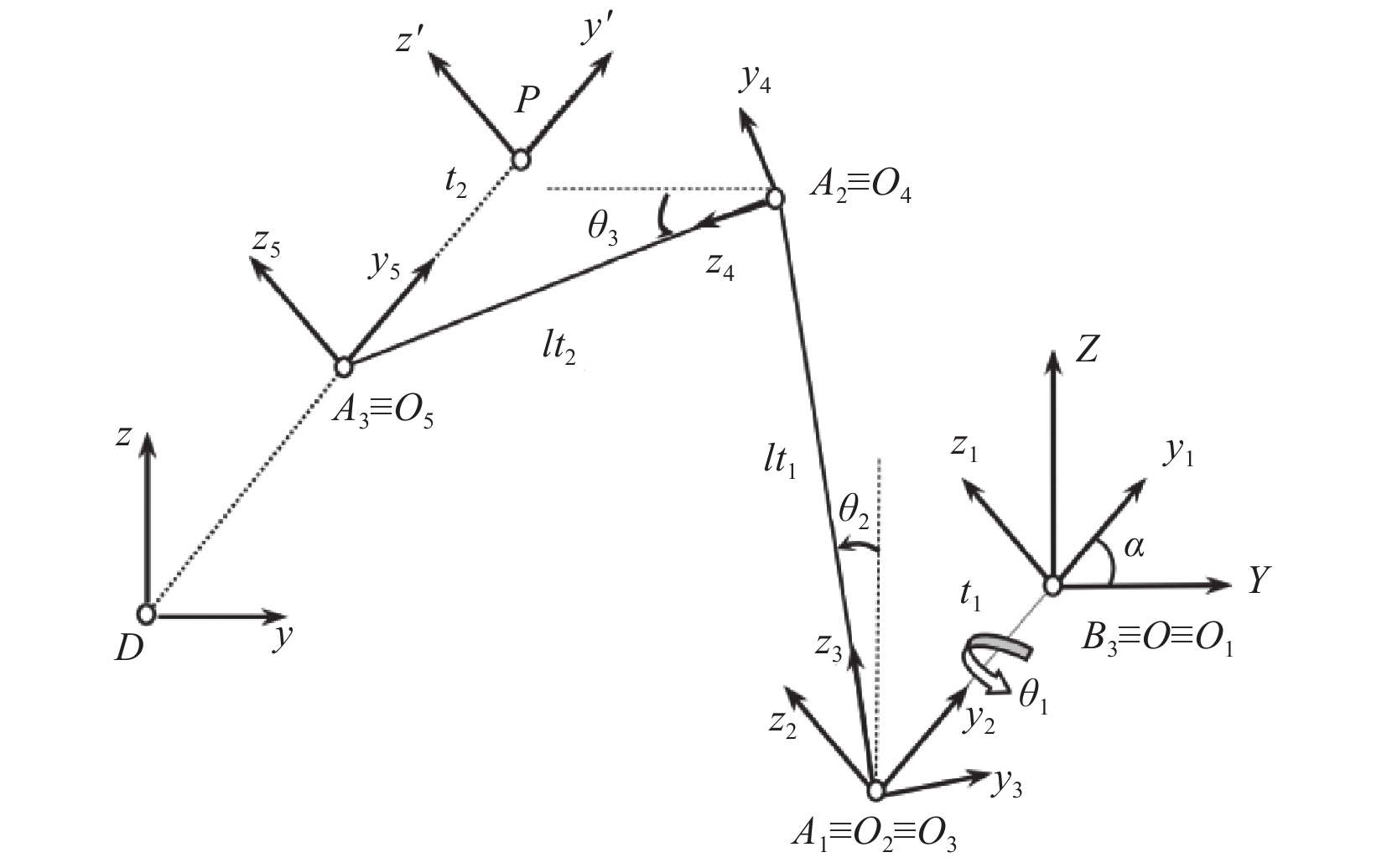
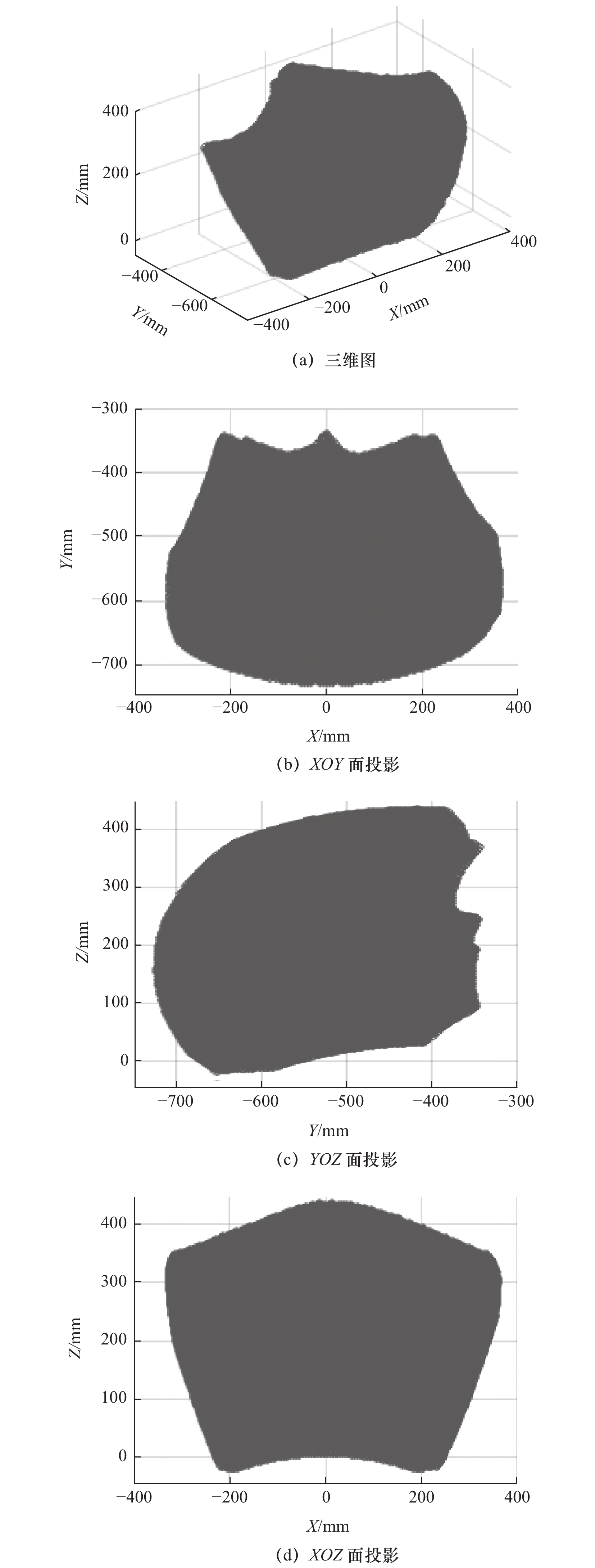
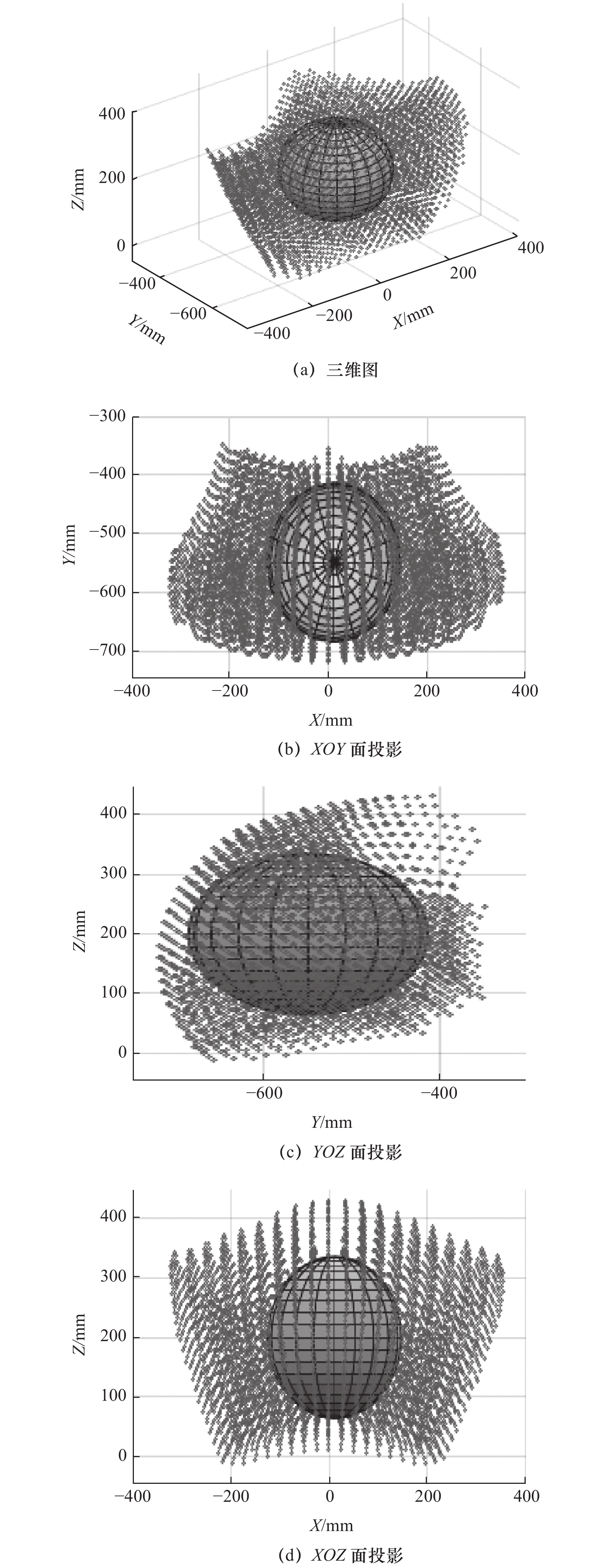
摘要: 以3-TPT并联机器人作为研究对象,建立了并联机构的运动学逆解和约束结构的运动学正解,给出了连杆和铰链极限约束条件的表达式。然后运用数值法获得工作空间点的集合,并根据并联机器人的实际应用环境,确定有效工作空间的定义,最后以有效工作空间体积最大为目标,基于并联机器人的基础结构尺寸,对连杆长度和约束结构转角范围进行优化,结果表明优化后的有效工作空间体积约是初始体积的1.5倍。Abstract: In this paper, 3-TPT parallel robot is taken as the research object, the inverse kinematics solution of the parallel mechanism and the forward kinematics solution of the constraint structure are established, and the expressions of the limit constraints of the connecting rod and hinge are given. Then, the set of workspace points is obtained by numerical method, and the definition of effective workspace is determined according to the actual application environment of parallel robot. Finally, aiming at the maximum volume of effective workspace, the length of connecting rod and the rotation range of restraint structure are optimized based on the basic structure size of parallel robot. The results show that the optimized volume of effective workspace is about 1.5 times of the initial volume.
-
Key words:
- parallel robot /
- constraint structure /
- effective workspace /
- structural optimization
-
表 1 并联机器人初始参数
L1min/mm L1max/mm L2min/mm L2max/mm L3min/mm L3max/mm 300 800 300 800 250 650 θ1min/(°) θ1max/(°) θ2min/(°) θ2max/(°) θ3min/(°) θ3max/(°) −30 30 −15 30 −45 30  下载: 导出CSV
下载: 导出CSV
-
[1] 叶鹏达, 尤晶晶, 仇鑫, 等. 并联机器人运动性能的研究现状及发展趋势[J]. 南京航空航天大学学报, 2020, 52(3): 363-377. doi: 10.16356/j.1005-2615.2020.03.003 [2] 张曙, Heisel U. 并联运动机床[M]. 北京: 机械工业出版社, 2003. [3] 冯志友, 李永刚, 张策, 等. 并联机器人机构运动与动力分析研究现状及展望[J]. 中国机械工程, 2006, 17(9): 979-984. doi: 10.3321/j.issn:1004-132X.2006.09.026 [4] 白萌, 高放, 王宁. 航天装配并联机构的工作空间特点及优化设计[J]. 工程机械, 2021, 52(2): 26-31,7. doi: 10.3969/j.issn.1000-1212.2021.02.007 [5] 何佳唯, 平雪良, 李朝阳, 等. 机器人工作空间求解方法研究及应用[J]. 机械传动, 2015, 39(10): 68-71. doi: 10.16578/j.issn.1004.2539.2015.10.016 [6] 郭本银, 刘钰, 苗亮. 六自由度微动并联机器人工作空间分析[J]. 长春理工大学学报:自然科学版, 2015, 38(4): 1-5. [7] Jiang Q. Singularity-free workspace of parallel robots[J]. Continuum Mechanics and Thermodynamics, 2015: 1-18. [8] 王宁. 少自由度并联机床工作空间及运动性能的研究[D]. 沈阳: 沈阳航空航天大学, 2015: 20-32. [9] 葛雍铭, 沈龙, 刘亮. 六自由度并联机构工作空间实验与研究[J]. 计量与测试技术, 2017, 44(11): 1-3. doi: 10.15988/j.cnki.1004-6941.2017.11.001 [10] Gao Z, Zhang D. Performance analysis mapping, and multi-objective optimization of a hybrid robotic machine tool[J]. IEEE Transactions on Industrial Electronics, 2015, 62(1): 423-433. doi: 10.1109/TIE.2014.2327008 [11] 郭建烨, 赵亮, 蔡光起. 一种并联机床约束机构参数对工作空间的影响分析[J]. 机械与电子, 2008(5): 10-13. [12] 郭建烨, 刘明哲, 史家顺, 等. 基于约束机构的并联机器人工作空间分析及优化[J]. 机械工程与自动化, 2019, 217(6): 31-34. doi: 10.3969/j.issn.1672-6413.2019.06.012 -

 下载:
下载:




 点击查看大图
点击查看大图
图(11) / 表(1)
计量
- 文章访问数: 162
- HTML全文浏览量: 14
- PDF下载量: 31
- 被引次数: 0


