

Kinematics simulation of 6R mechanical arm based on MATLAB
-
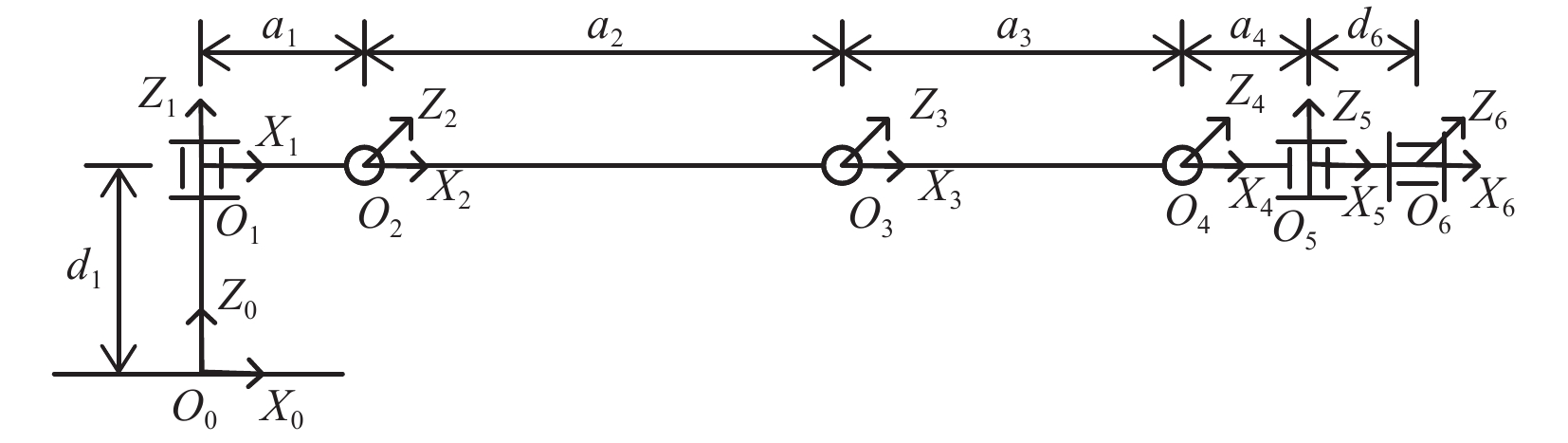
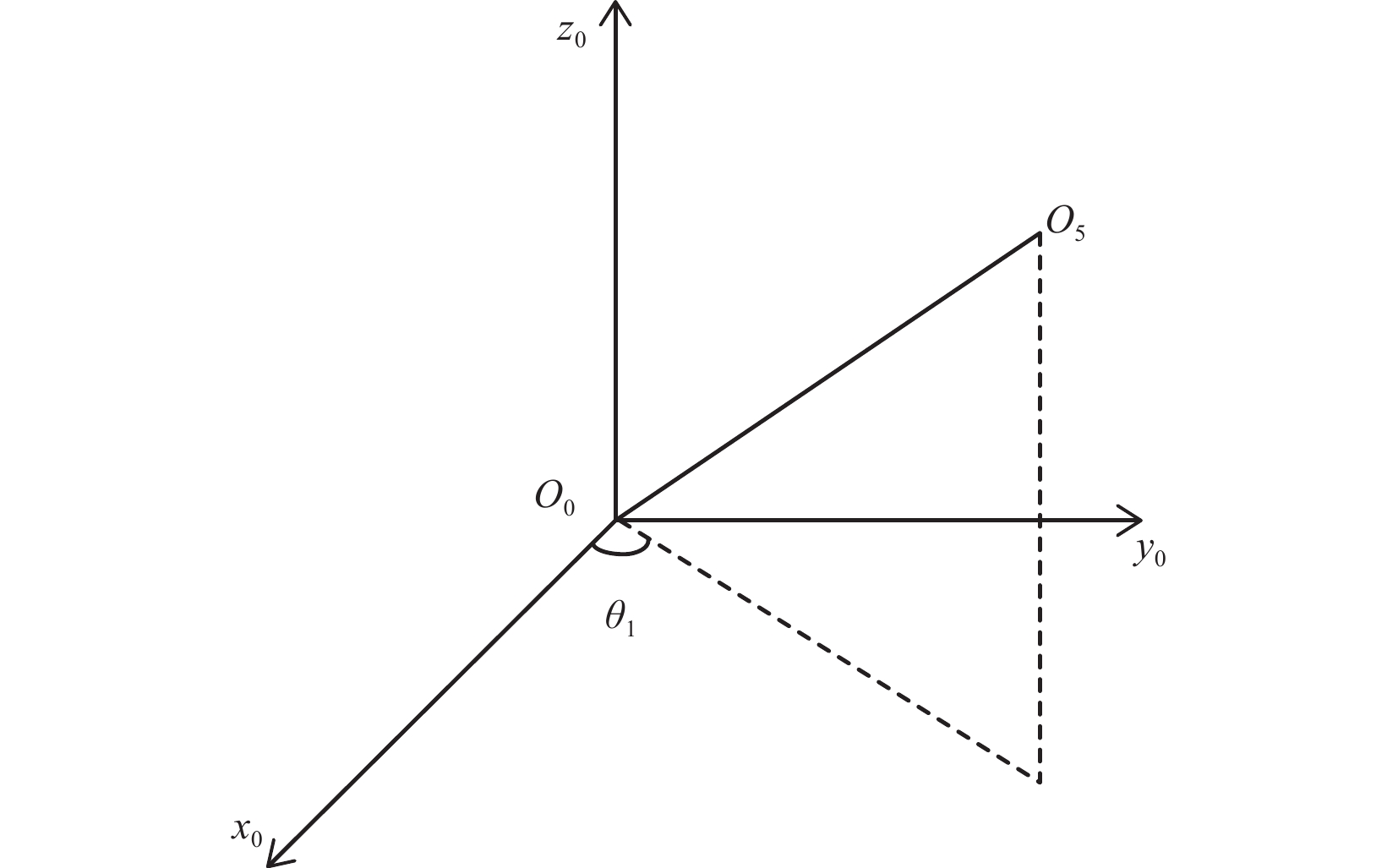
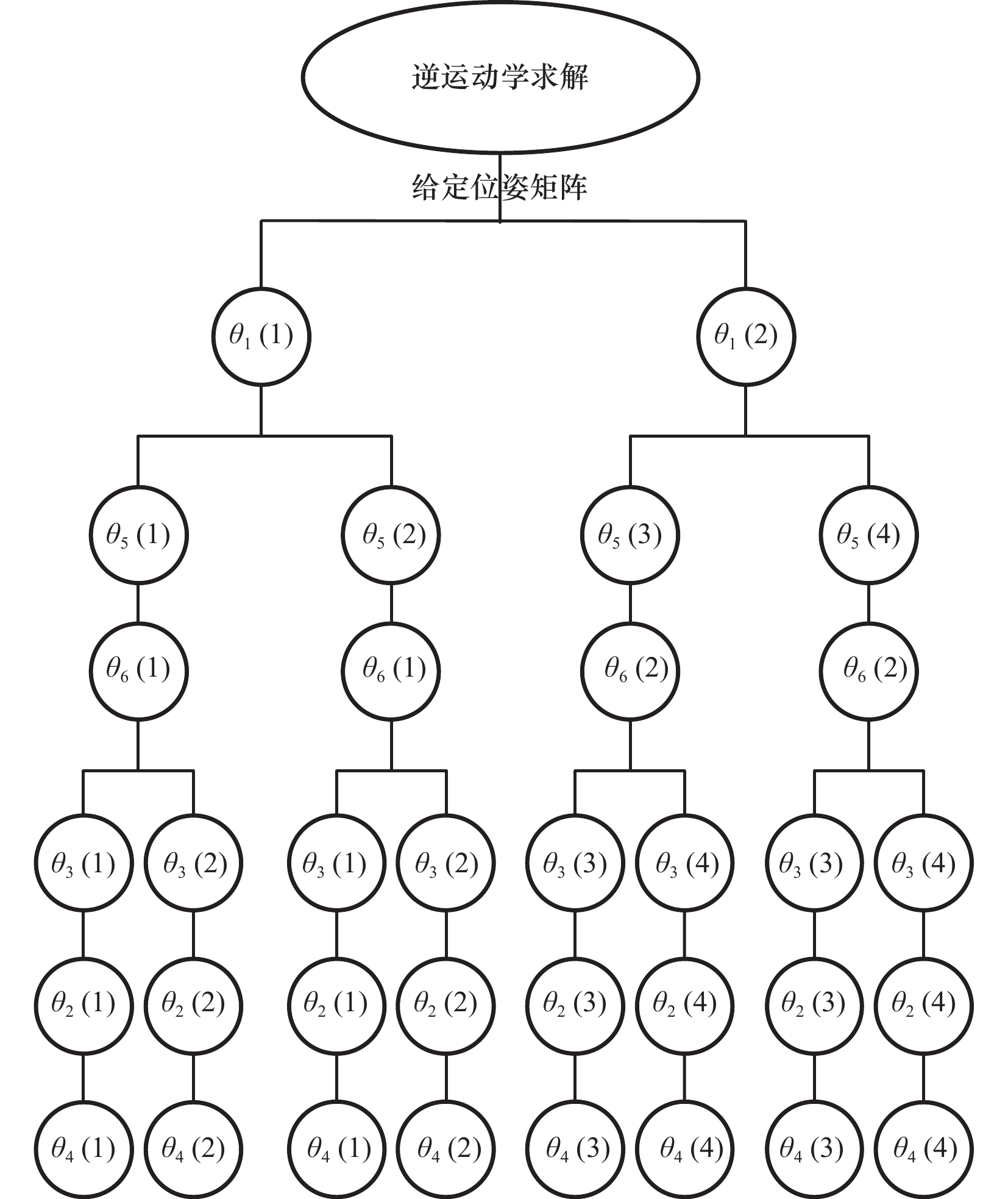
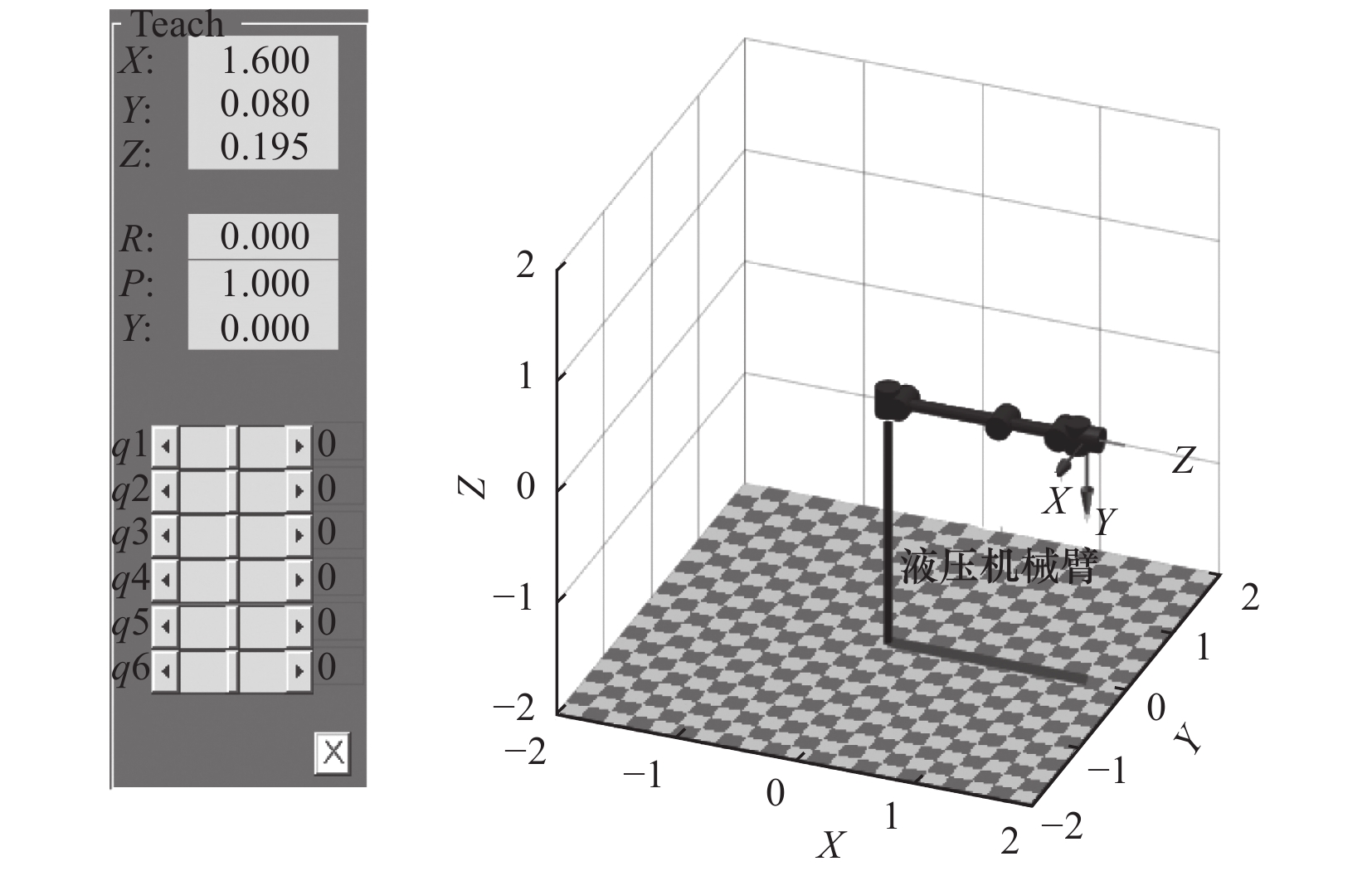
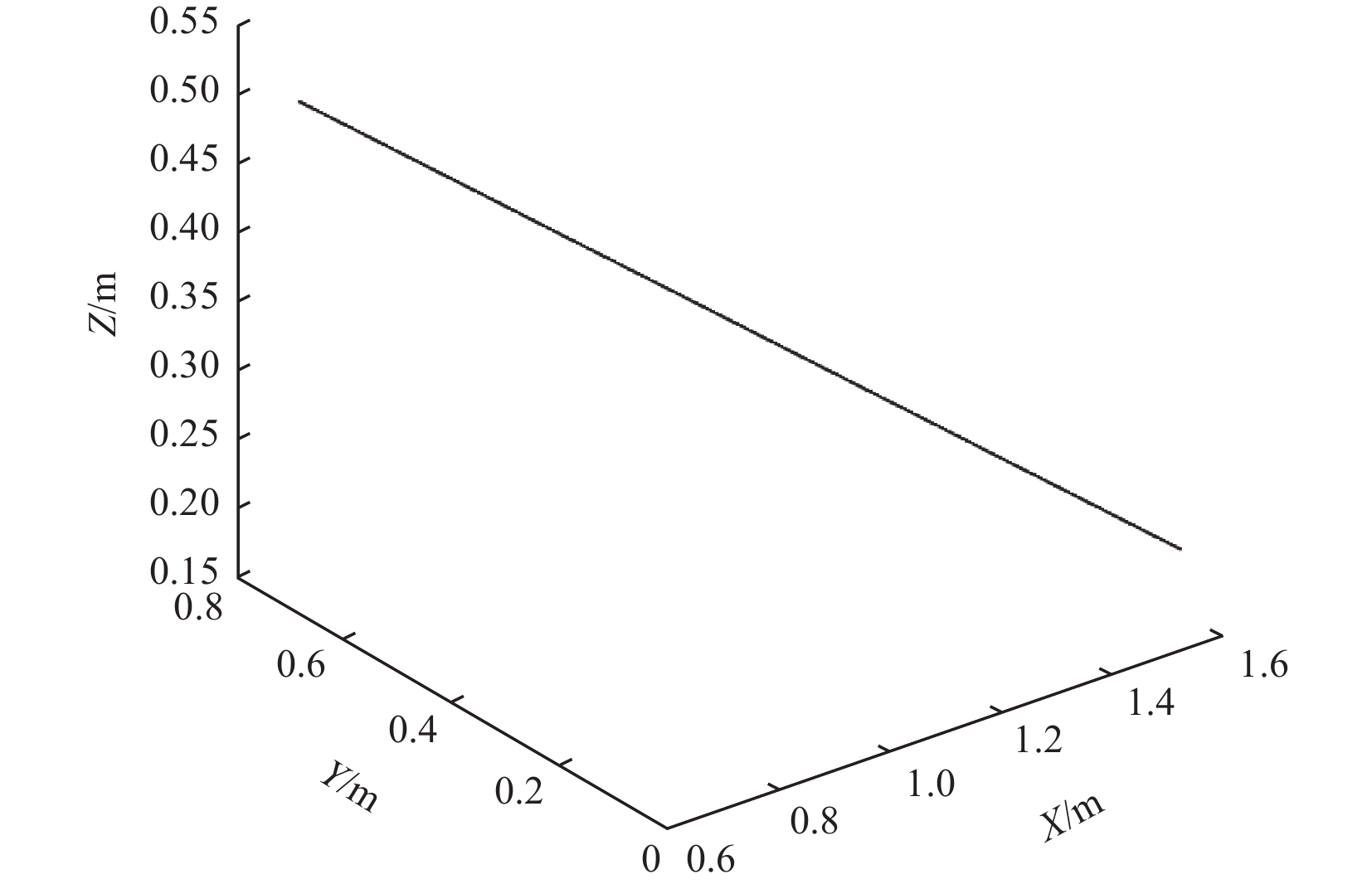
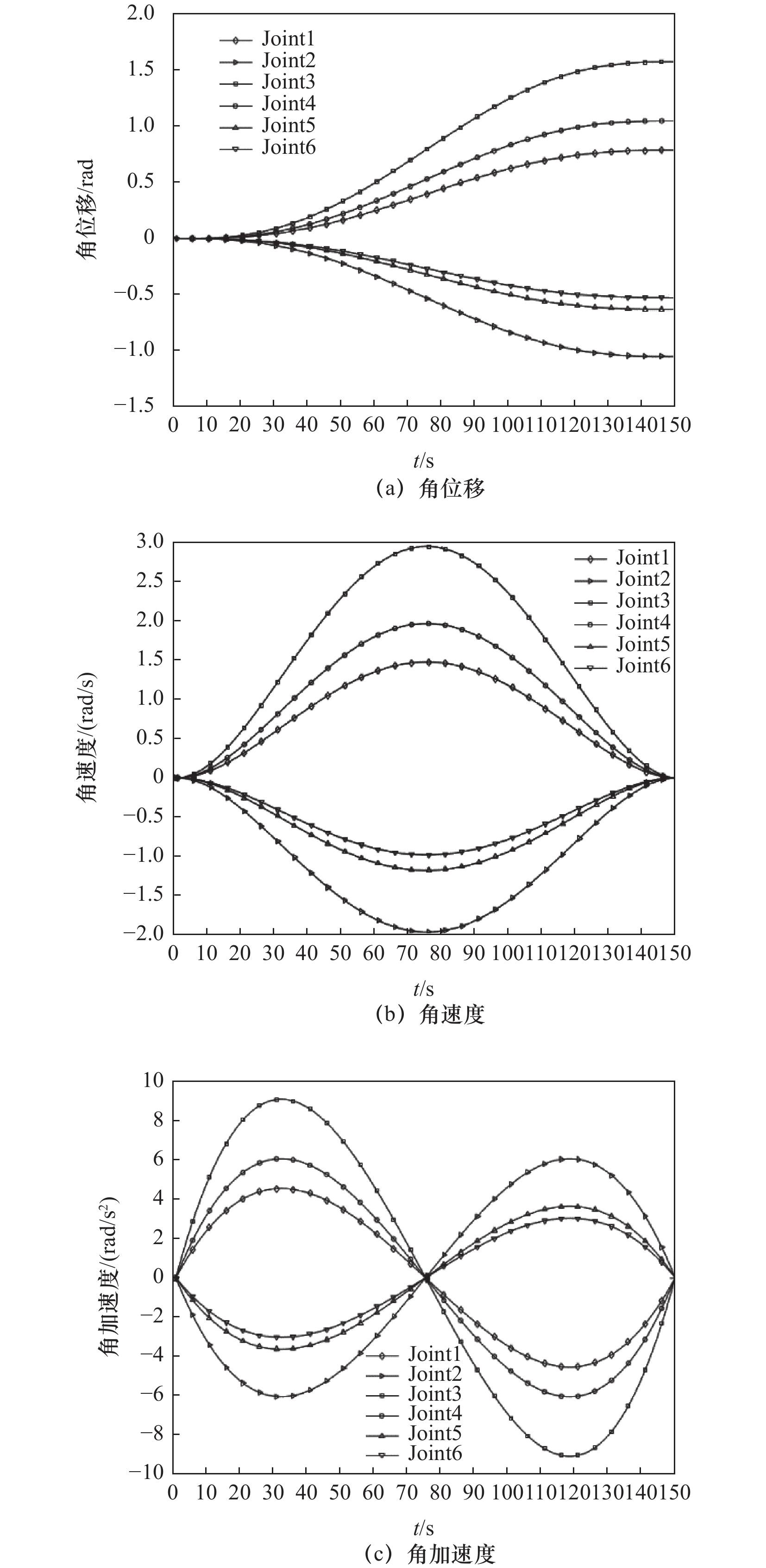
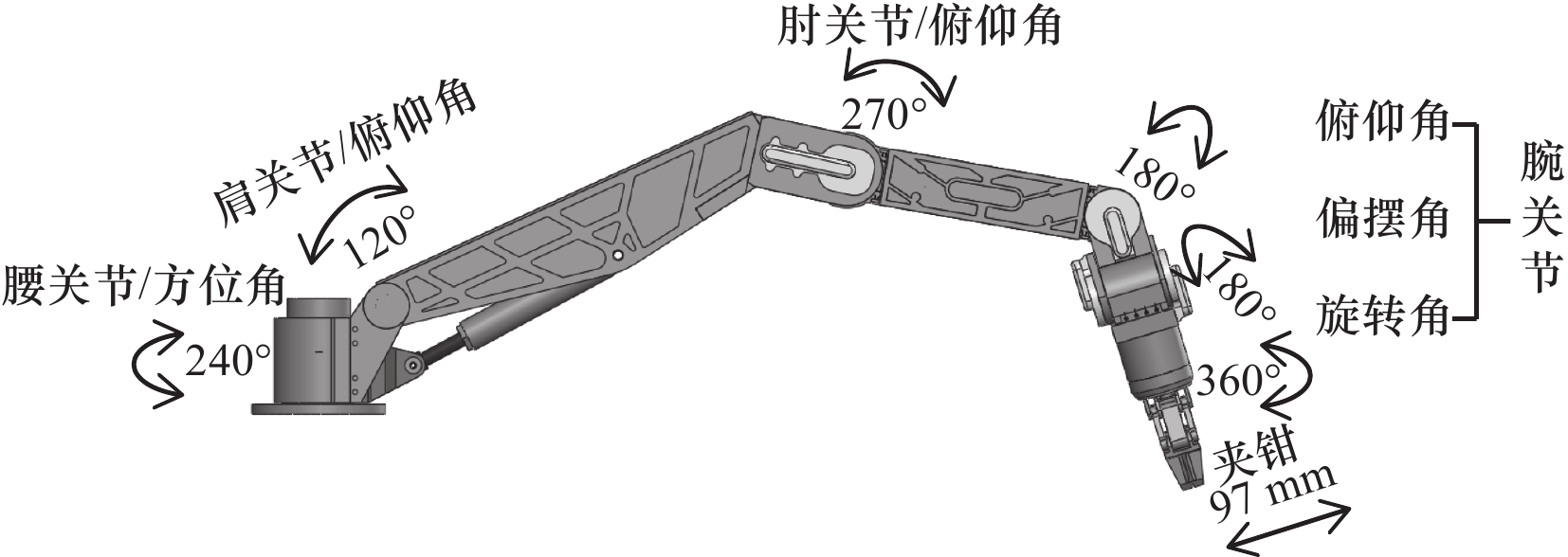
摘要: 为了更好地控制液压机械臂在工业生产中作业,以6R液压机械臂为研究对象,运用改进D-H法对其进行建模,建立正运动学方程,通过空间几何法和数值解析法结合的方式得到机械臂各关节角度变量的8组解。通过MATLAB软件中的Robots Toolbox对机械臂建模,在关节空间内对其进行运动轨迹仿真,得到各关节轴的角位移、角速度和角加速度随时间变化的平滑曲线,仿真结果验证了所建立的运动学方程的正确性以及该机械臂参数的合理性。为后续液压机械臂的运动规划及实时控制提供了必要的理论基础和正确的运动学模型。Abstract: In order to better control the operation of the hydraulic manipulator in industrial production, the 6R hydraulic manipulator is taken as the research object, the improved D-H method is used to model it, and the forward kinematics equation is established. Eight sets of solutions for the angle variables of each joint of the manipulator are obtained. The robotic arm is modeled by Robots Toolbox in MATLAB software, the motion trajectory of the robot was simulated in the joint space, and the smooth curves of angular displacement, angular velocity and angular acceleration of each joint axis with the time were obtained. The simulation results proved that the kinematics equation established is correct and the parameters of the robot are reasonable. It provides the necessary theoretical basis and correct kinematics model for the subsequent motion planning and real-time control of the hydraulic manipulator.
-
Key words:
- six degree of freedom mechanical arm /
- MATLAB /
- kinematics /
- simulation
-
表 1 液压机械臂D-H参数
$ i $ $ {a}_{i-1}/{\rm{mm}} $ ${\alpha _{i - 1} }/(^\circ )$ $ {d_i}/{\rm{mm}} $ ${\theta _i}/(^\circ )$ 关节范围/$ (^\circ ) $ 1 $ 0 $ $ 0 $ $ {d_1}(195) $ $ {\theta _1} $ $ (-120,120) $ 2 $ {a_1}(120) $ $ - 90 $ $ 0 $ $ {\theta _2} $ $ ( - 32.5,87.5) $ 3 $ {a_2}(850) $ $ 0 $ $ 0 $ $ {\theta _3} $ $ ( - 172,98) $ 4 $ {a_3}(500) $ $ 0 $ $ 0 $ $ {\theta _4} $ $ ( - 90,90) $ 5 $ {a_4}(130) $ $ 90 $ $ 0 $ $ {\theta _5} $ $ (-90,90) $ 6 $ 0 $ $ -90 $ $ {d_6}(80) $ $ {\theta }_{6} $ $ ( - 360,360) $  下载: 导出CSV
下载: 导出CSV
表 2 运动学逆解数值
组别 $ {\theta _1} $ $ {\theta _2} $ $ {\theta _3} $ $ {\theta _4} $ $ {\theta _5} $ $ {\theta _6} $ 1 0.523 6 1.047 2 0.785 4 1.309 0 0.785 4 2.094 4 2 0.523 6 1.618 6 −0.785 4 −3.974 8 0.785 4 2.094 4 3 0.523 6 1.047 2 0.785 4 1.309 0 −0.785 4 2.094 4 4 0.523 6 1.618 6 −0.785 4 −3.974 8 −0.785 4 2.094 4 5 −2.618 0 1.858 2 0.342 9 −2.201 0 2.356 2 −1.047 2 6 −2.618 0 2.111 3 −0.342 9 −1.768 5 2.356 2 −1.047 2 7 −2.618 0 1.858 2 0.342 9 −2.201 0 −2.356 2 −1.047 2 8 −2.618 0 2.111 3 −0.342 9 −1.768 5 −2.356 2 −1.047 2
下载: 导出CSV
-
[1] 郭发勇, 梅涛, 赵江海. D-H法建立连杆坐标系存在的问题及改进[J]. 中国机械工程, 2014, 25(20): 2710-2714. doi: 10.3969/j.issn.1004-132X.2014.20.003 [2] Li F T, Zhu X C, Cao J, et al. Kinematics modeling and workspace analysis of a 5-dof hydraulic manipulator[C]. 2019 5th International Conference on Control, Automation and Robotics (ICCAR). IEEE, 2019: 2251-2446. [3] 郭志强, 崔天时, 吕信超, 等. 六自由度机械臂逆运动学求解[J]. 农机化研究, 2016, 38(12): 51-55. doi: 10.3969/j.issn.1003-188X.2016.12.010 [4] 赵修琪, 卢继霞, 陈相如, 等. 五自由度镀膜机械臂的运动学分析与仿真[J]. 机械设计与制造, 2022(1): 257-261. doi: 10.3969/j.issn.1001-3997.2022.01.058 [5] 张普行, 严军辉, 贾秋玲. 六自由度机械手的运动学分析[J]. 制造业自动化, 2011, 33(20): 68-71. doi: 10.3969/j.issn.1009-0134.2011.10(x).22 [6] Peng J Q, Xu W F, Wang Z Y, et al. Analytical inverse kinematics and trajectory planning for a 6DOF grinding robot[C]. IEEE International Conference on Information & Automation. IEEE, 2014. [7] 党浩明, 周亚丽, 张奇志. 六自由度串联机械臂建模与运动学分析[J]. 实验室研究与探索, 2018, 37(10): 9-14,23. doi: 10.3969/j.issn.1006-7167.2018.10.004 [8] Zarrin A, Azizi S, Aliasghary M, et al. A novel inverse kinematics scheme for the design and fabrication of a fve degree of freedom arm robot[J]. International Journal of Dynamics and Control, 2020, 8: 604-614. doi: 10.1007/s40435-019-00558-1 [9] Duka A V. Neural network based inverse kinematics solution for trajectory tracking of a robotic arm[J]. Procedia Technology, 2014, 12(1): 20-27. [10] 熊有伦, 李文龙, 陈文斌. 机器人学建模、控制与视觉[M]. 武汉: 华中科技大学出版社, 2018: 93-97. [11] Qi F, Ping X L, Liu J, et al. The analysis and simulation of robot kinematics and dynamics based on robot analyzer[J]. International Journal of Emerging Technology and Advanced. Engineering, 2015, 5(4): 16-20. [12] 张程, 张卓. 码垛机器人运动学分析及关节空间轨迹规划研究[J]. 组合机床与自动化加工技术, 2020(2): 19-21,25. doi: 10.13462/j.cnki.mmtamt.2020.02.005 -

 下载:
下载:


 点击查看大图
点击查看大图
图(8) / 表(2)
计量
- 文章访问数: 199
- HTML全文浏览量: 26
- PDF下载量: 41
- 被引次数: 0


