

Comparative study on dynamics of redundant parallel robot based on two modeling methods
-
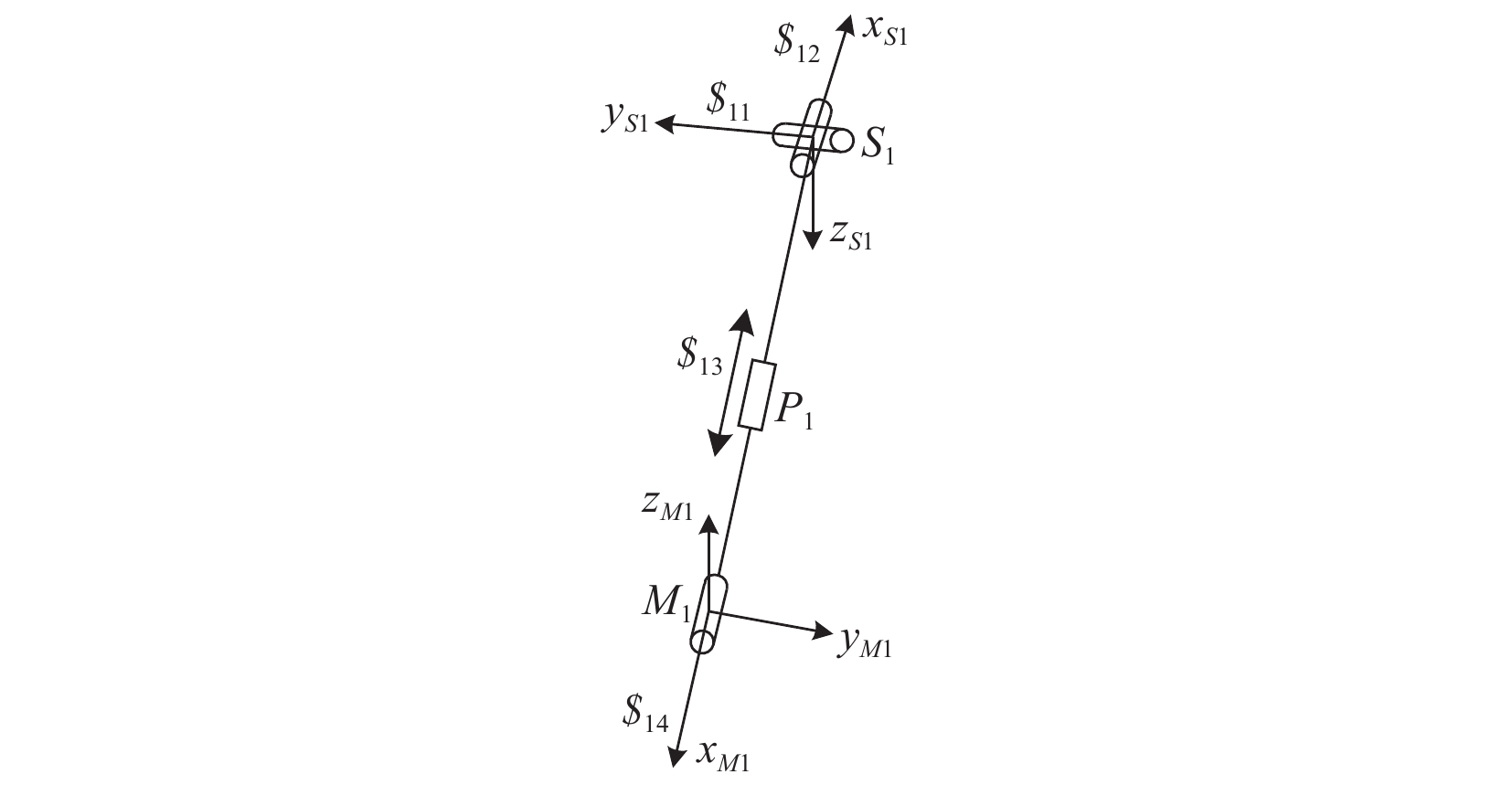
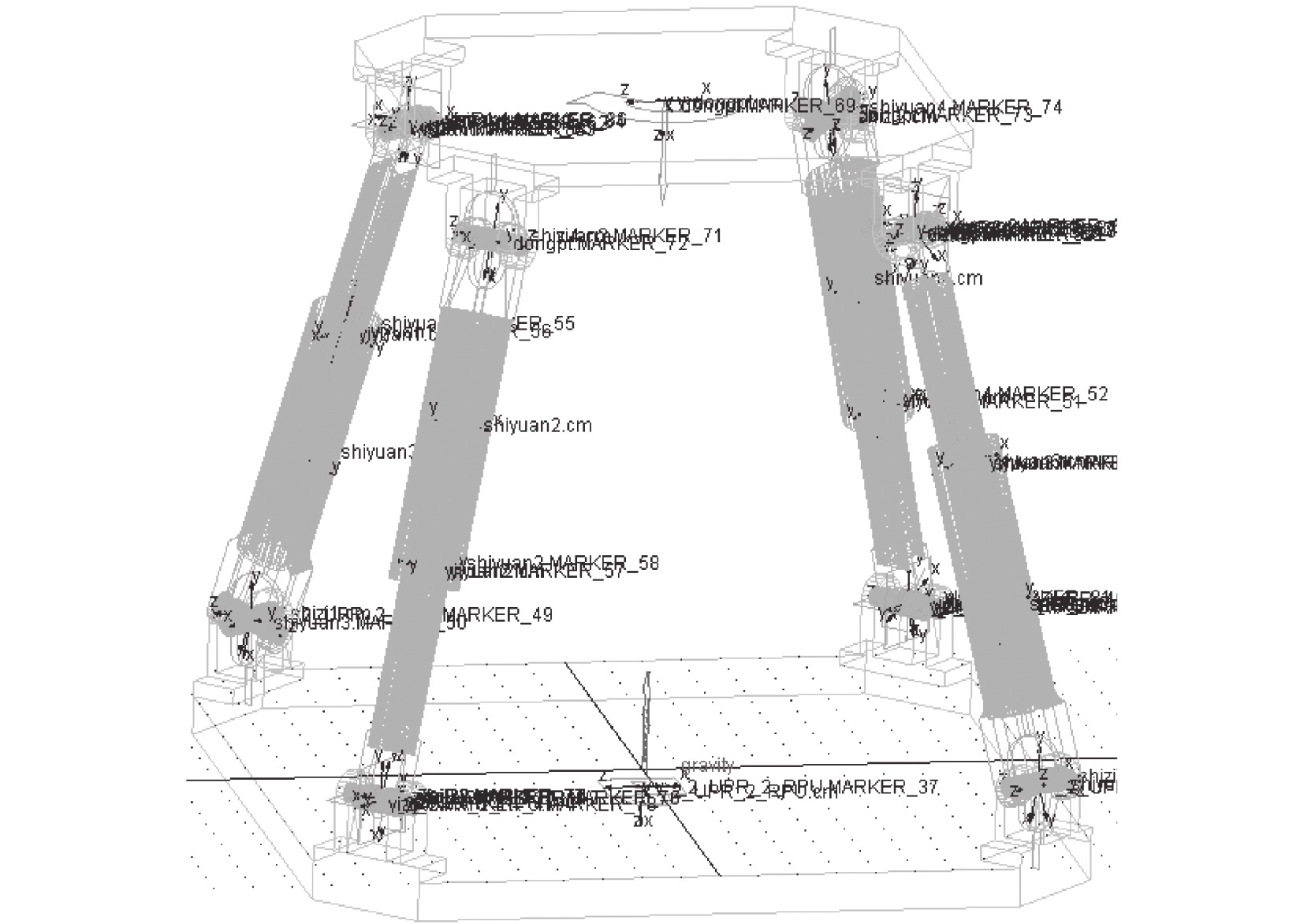
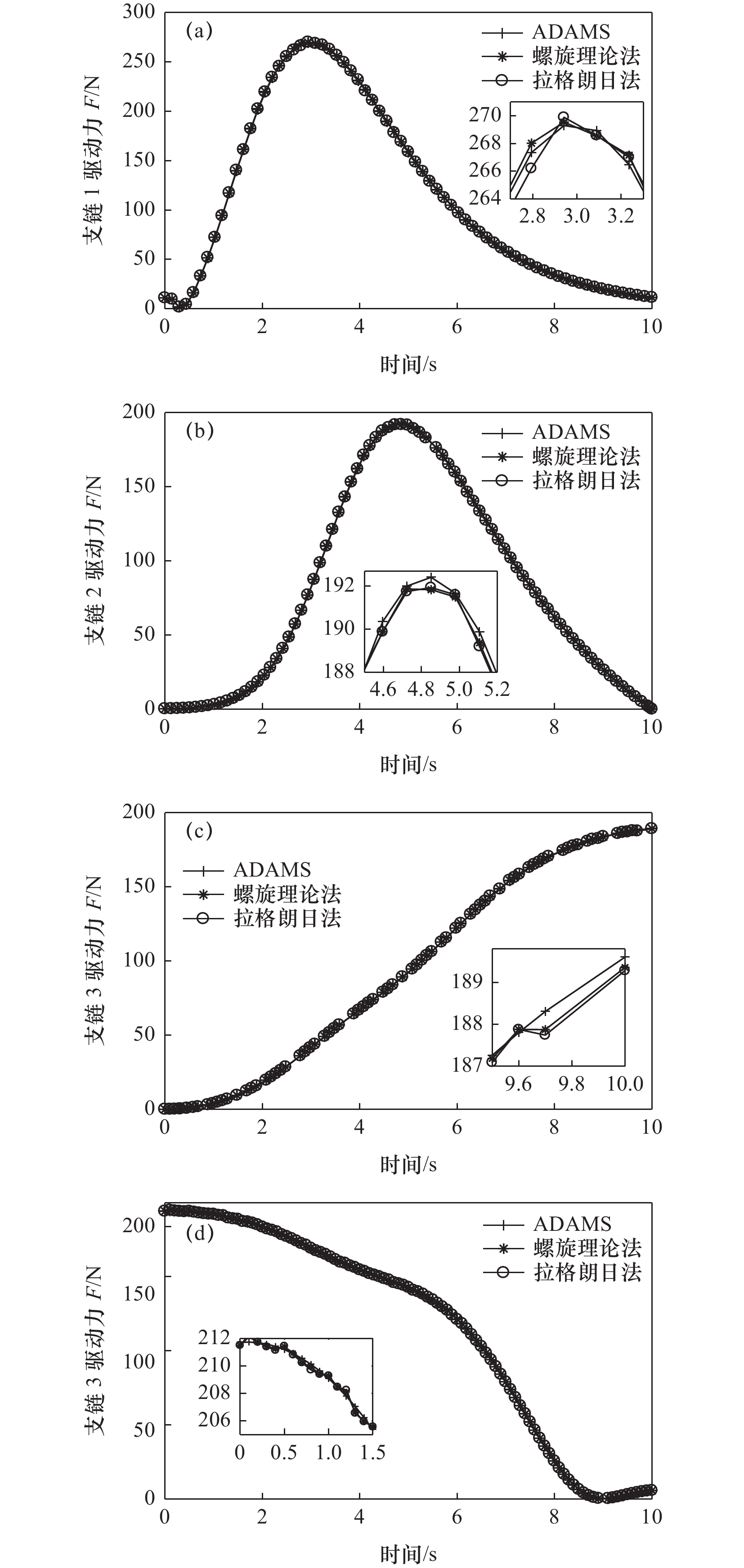
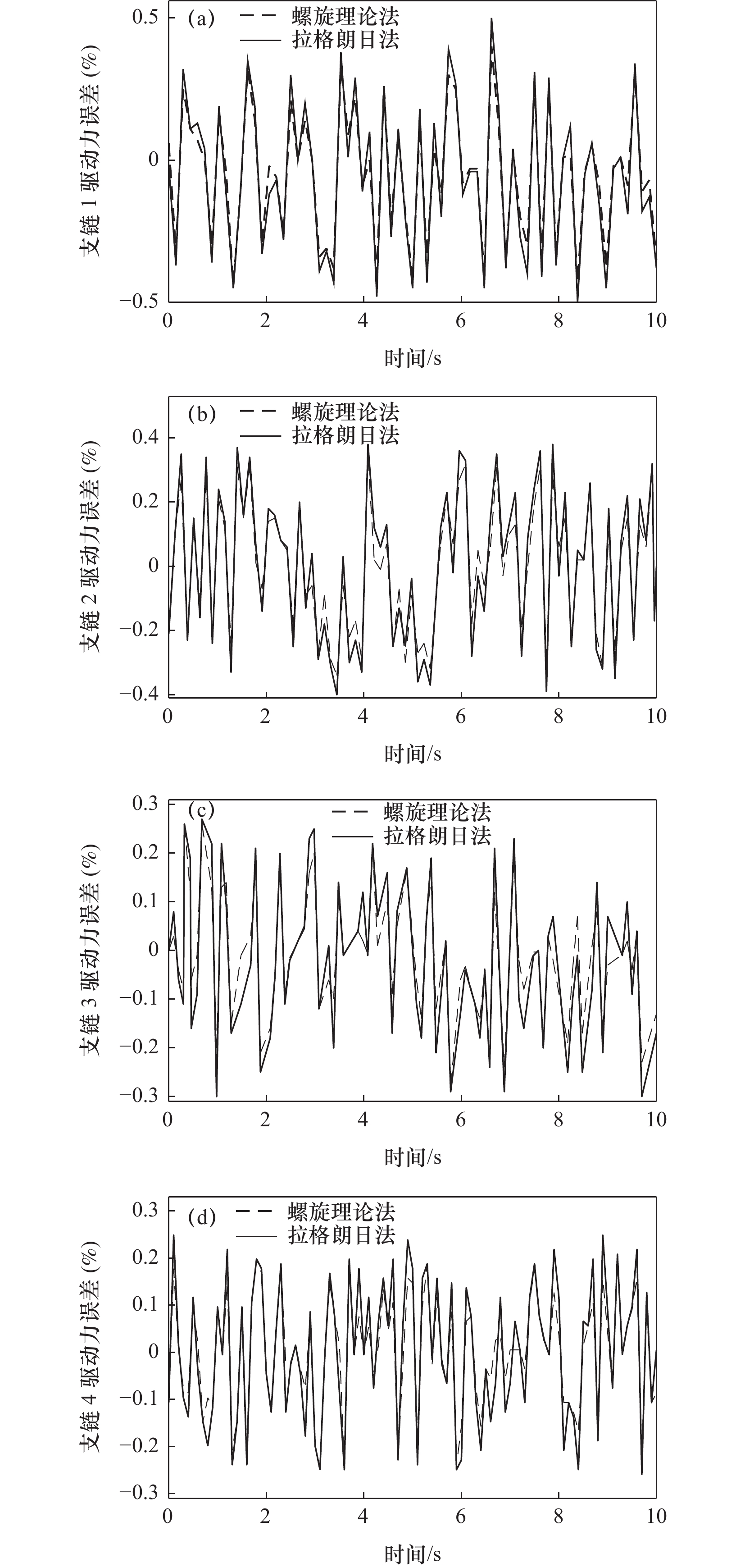
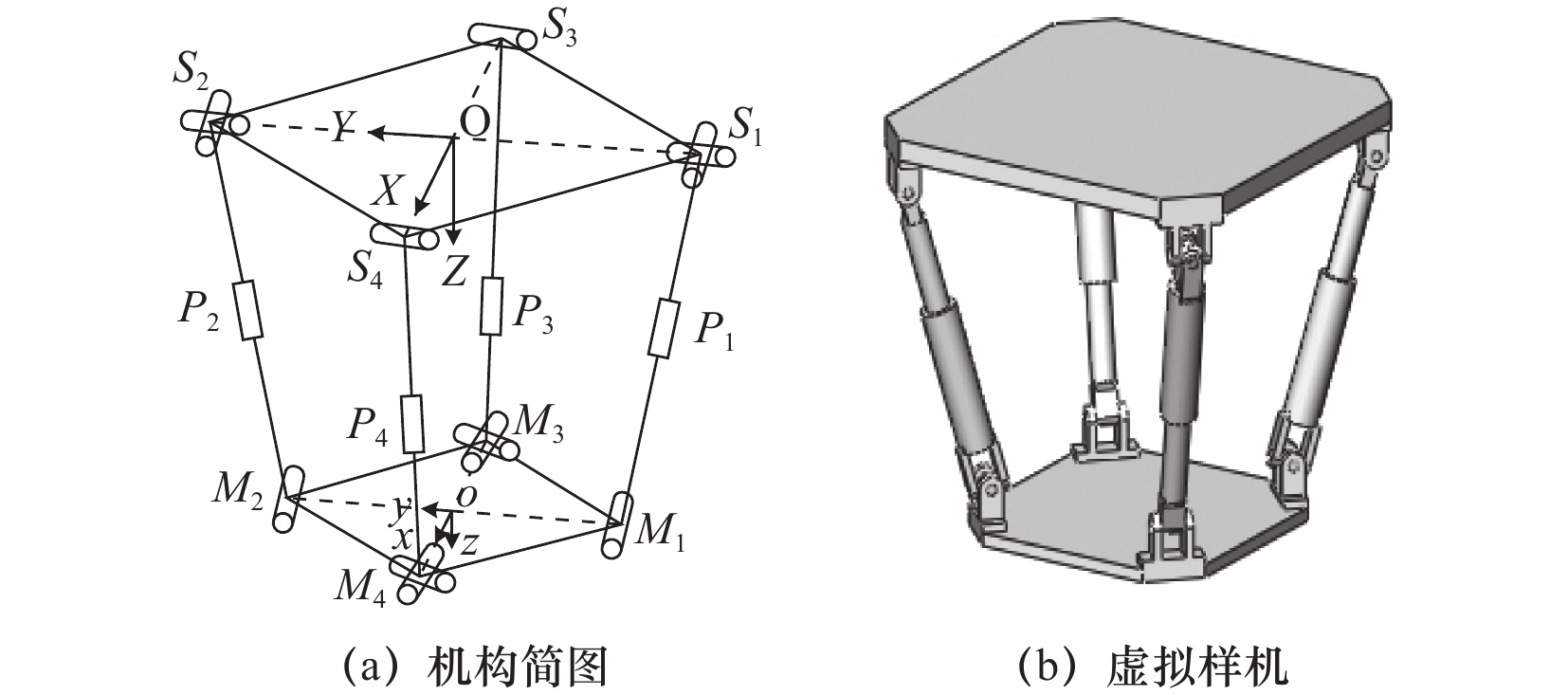
摘要: 提出一种新型2-UPR/2-RPU冗余并联机器人并以其为研究对象,采用螺旋理论和拉格朗日法两种方法对其进行动力学建模与动力学对比研究。首先,采用封闭矢量法在全局坐标系下建立2-UPR/2-RPU并联机器人的运动学反解方程。其次,采用拉格朗日法求解了并联机器人各构件的速度关系并建立了其动力学模型。然后,采用螺旋理论对并联机器人4个支链中各关节和杆件的速度和加速度进行分析,同时结合虚功原理建立并联机器人的动力学模型。最后,以并联机器人动力学模型为基础,在MATLAB中编程得到并联机构的算法,求解得到了基于螺旋理论和拉格朗日方程建立的动力学模型各支链驱动力数值仿真结果,并通过与ADAMS软件的动力学仿真结果进行仿真验证和误差分析。结果表明:螺旋理论建立的动力学模型精度相对较高、方法方便且计算简单、更适用于少自由度并联机构动力学模型的建立和机构动力学的控制。极大地提高了2-UPR/2-RPU并联机器人响应速度和控制精度,满足磨床打磨曲面的精度要求,为机构的实践应用提供了可靠的理论依据并奠定了重要基础。
-
关键词:
- 2-UPR/2-RPU并联机器人 /
- 螺旋理论 /
- 拉格朗日方程 /
- 误差分析
Abstract: A new type of 2-UPR/2-RPU redundant parallel robot is proposed and used as the research object. The dynamic modeling and dynamic comparison research of it is carried out by using the spiral theory and Lagrangian method. First, the closed vector method is used to establish the kinematic inverse equation of the 2-UPR/2-RPU parallel robot in the global coordinate system; Secondly, the Lagrangian method is used to solve the velocity relationship of each component of the parallel robot and its dynamic model is established; Then, the velocities and accelerations of the joints and rods in the four branches of the parallel robot are analyzed using the screw theory, at the same time, the dynamic model of the parallel robot is established based on the principle of virtual work; Finally, based on the dynamic model of the parallel robot, the algorithm of the parallel mechanism is obtained by programming in MATLAB, and the numerical simulation results of the driving force of each branch chain of the dynamic model is established based on the screw theory and Lagrangian equation are obtained. The simulation verification and error analysis are carried out through the dynamic simulation results with ADAMS software.The results show that the dynamic model established by the screw theory has relatively high accuracy, convenient method and simple calculation, and is more suitable for the establishment of the dynamic model of the parallel mechanism with few degrees of freedom and the control of the mechanism dynamics; it greatly improves the 2-UPR/2-RPU,the response speed and control accuracy of the parallel robot meet the precision requirements of the grinding machine for grinding curved surfaces, which provides a reliable theoretical basis and an important foundation for the practical application of the mechanism.-
Key words:
- 2-UPR/2-RPU parallel robot /
- screw theory /
- lagrange equation /
- error analysis
-
[1] 山显雷, 程刚. 考虑关节摩擦的3SPS+1PS并联机构显式动力学建模研究[J]. 机械工程学报, 2017, 53(1): 28-35. [2] 李剑锋, 张凯, 张雷雨,等. 并联踝康复机器人的设计与运动性能评价[J]. 机械工程学报, 2019, 55(9): 29-39. [3] 潘国威, 陈文亮, 王珉. 应用于飞机装配的并联机构技术发展综述[J]. 航空学报, 2019, 40(1): 272-288. [4] 刘荣帅, 李清, 杜昱东,等. 3-CUR并联分拣机器人的运动学分析与仿真[J]. 包装工程, 2019, 40(21): 179-186. doi: 10.19554/j.cnki.1001-3563.2019.21.026 [5] 郝亮亮. 基于3-PRC并联机构的锂电池包装机应用[J]. 包装工程, 2021, 42(1): 171-177. doi: 10.19554/j.cnki.1001-3563.2021.01.024 [6] 朱伟, 汪源, 沈惠平,等. 仿腕关节柔顺并联打磨机器人设计与试验[J]. 农业机械学报, 2016, 47(2): 402-407,348. doi: 10.6041/j.issn.1000-1298.2016.02.054 [7] 陈修龙, 孙德才, 王清. 基于拉格朗日的冗余驱动并联机构刚体动力学建模[J]. 农业机械学报, 2015, 46(12): 329-336. doi: 10.6041/j.issn.1000-1298.2015.12.045 [8] Ramos D R, Pamanes J A, Wenger P. Trajectory planning of kinematically redundant parallel manipulators by using multiple working modes[J]. Mechanism and Machine Theory, 2015, 98: 216-230. [9] Isaksson M, Gosselin C, Marlow K. An introduction to utilising the redundancy of a kinematically redundant parallel manipulator to operate a gripper[J]. Mechanism and Machine Theory, 2016, 101: 50-59. doi: 10.1016/j.mechmachtheory.2016.03.006 [10] 宋轶民, 金雪莹, 梁栋, 等. 两类平面并联机构凯恩动力学建模与比较研究[J]. 天津大学学报:自然科学与工程技术版, 2019, 52(2): 173-182. [11] 陈子明, 刘晓檬, 张扬, 等. 对称两转一移3-UPU并联机构的动力学分析[J]. 机械工程学报, 2017, 53(21): 46-53. [12] 贾凯凯, 梅江平, 刘松涛, 等. 4自由度并联机构刚体动力学模型[J]. 机械工程学报, 2016, 52(13): 10-16. [13] 韩博, 韩媛媛, 许允斗, 等. 基于螺旋理论的四面体可展机构运动特性与动力学分析[J]. 机器人, 2020, 42(1): 21-28,38. doi: 10.13973/j.cnki.robot.190078 [14] 张荣敏, 陈原, 高军. 矢量推进解耦球面并联机构动力学研究[J]. 农业机械学报, 2015, 46(6): 319-326. doi: 10.6041/j.issn.1000-1298.2015.06.046 [15] 陈原, 何淑垒, 姜媛, 等. 轮-腿复合式移动机器人球面并联腿机构的动力学模型[J]. 光学精密工程, 2019, 27(8): 1800-1810. [16] 柴馨雪, 杨泳, 徐灵敏, 等. 2-UPR-RPU并联机器人的动力学建模与性能分析[J]. 机械工程学报, 2020, 56(13): 110-119. [17] 李二伟, 赵铁石, 王唱, 等. 大型重载并联稳定接货平台动力学建模[J]. 农业机械学报, 2018, 49(3): 411-417,346. doi: 10.6041/j.issn.1000-1298.2018.03.052 [18] 高名旺, 张宪民. 4-RRR冗余并联机器人驱动力优化[J]. 农业机械学报, 2014, 45(1): 301-305. doi: 10.6041/j.issn.1000-1298.2014.01.046 [19] 林光春, 廖勋宝, 赵荣宽, 等. 2-UPR&2-RPU冗余并联机构动力学与功耗分析[J]. 工程科学与技术, 2021, 53(1): 146-154. [20] 柳建飞. 2-UPR-2-RPU冗余驱动并联机器人设计[D]. 杭州: 浙江理工大学, 2017: 10-11. -

 下载:
下载:

 点击查看大图
点击查看大图
图(5)
计量
- 文章访问数: 75
- HTML全文浏览量: 5
- PDF下载量: 15
- 被引次数: 0


