

Design development and experimental research of positioner for industrial robot
-
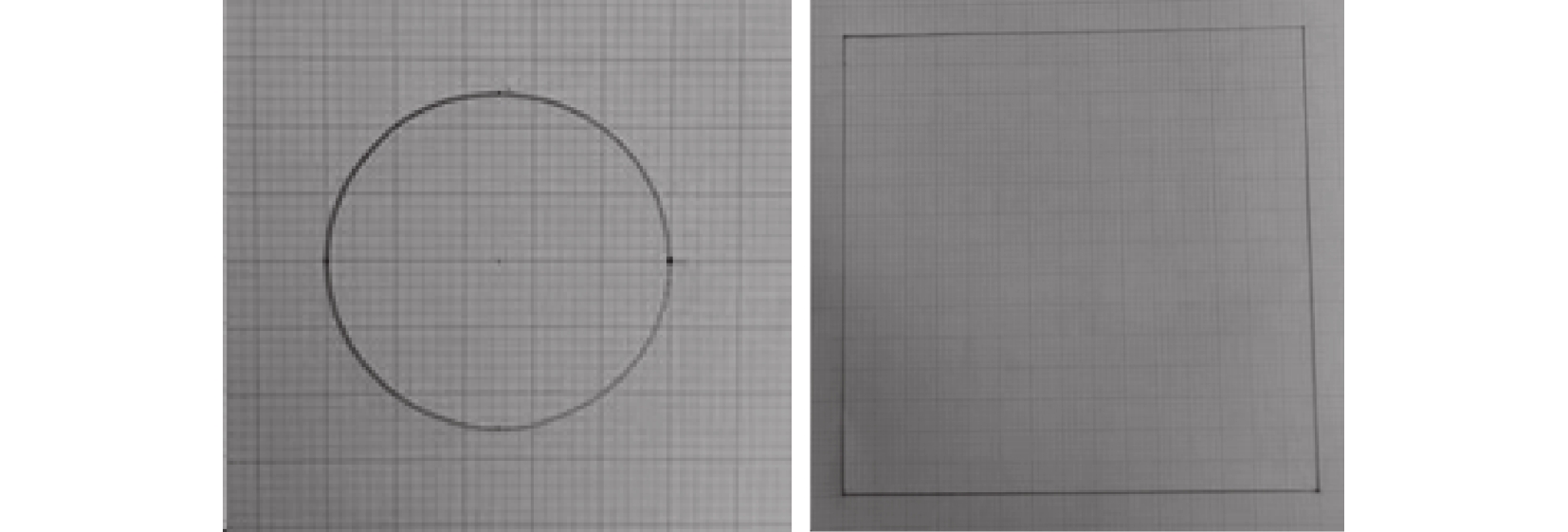
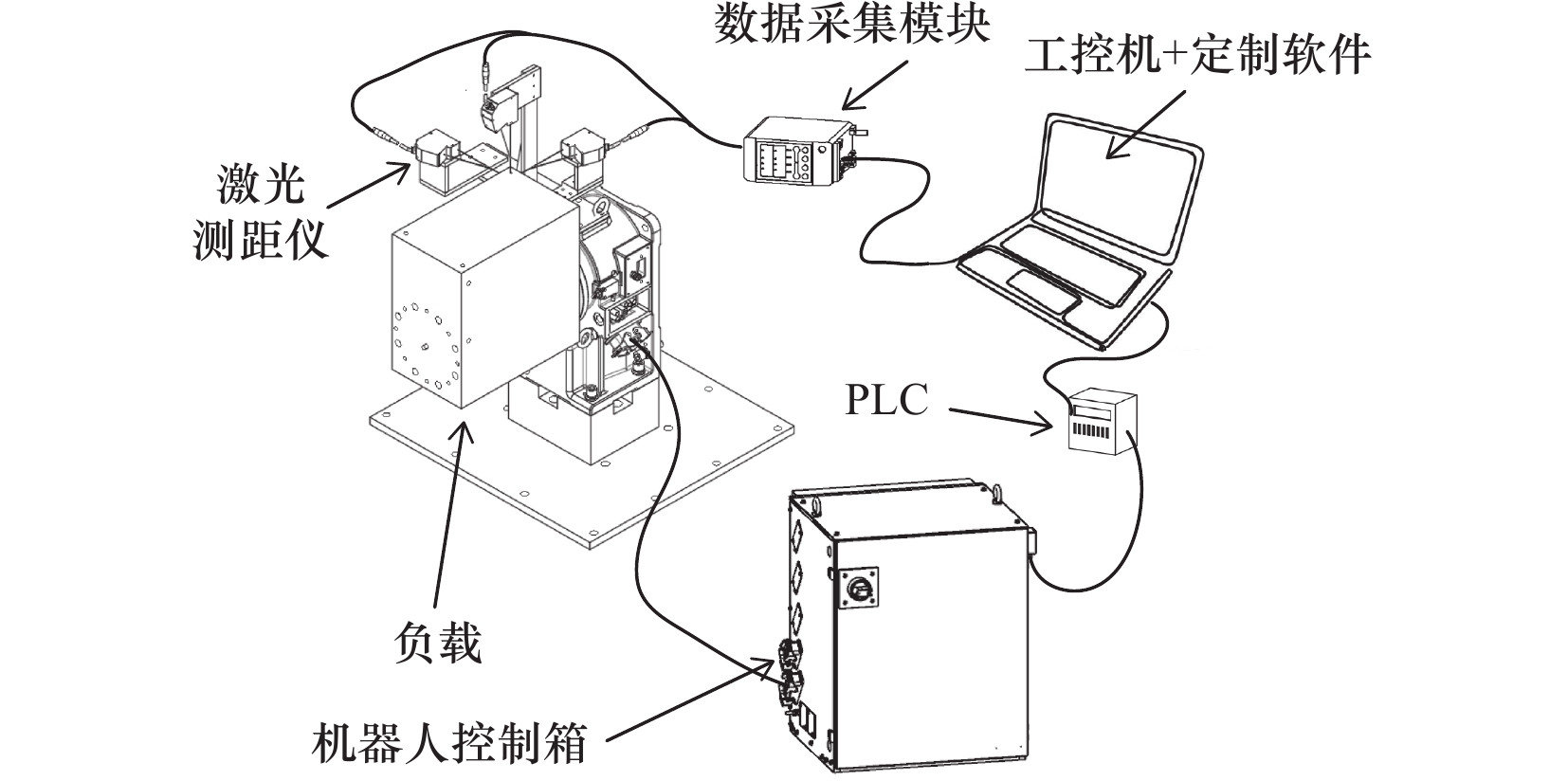
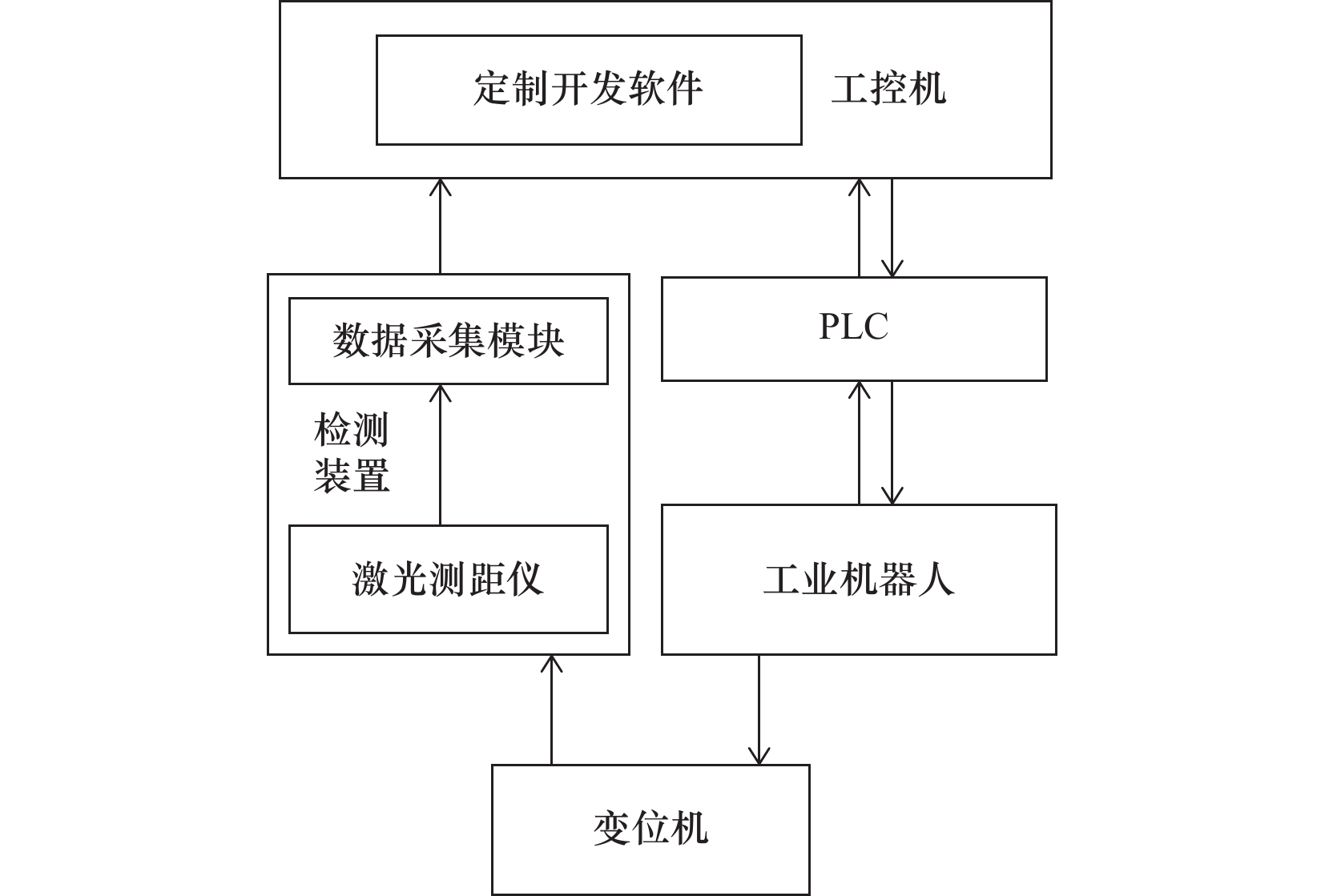
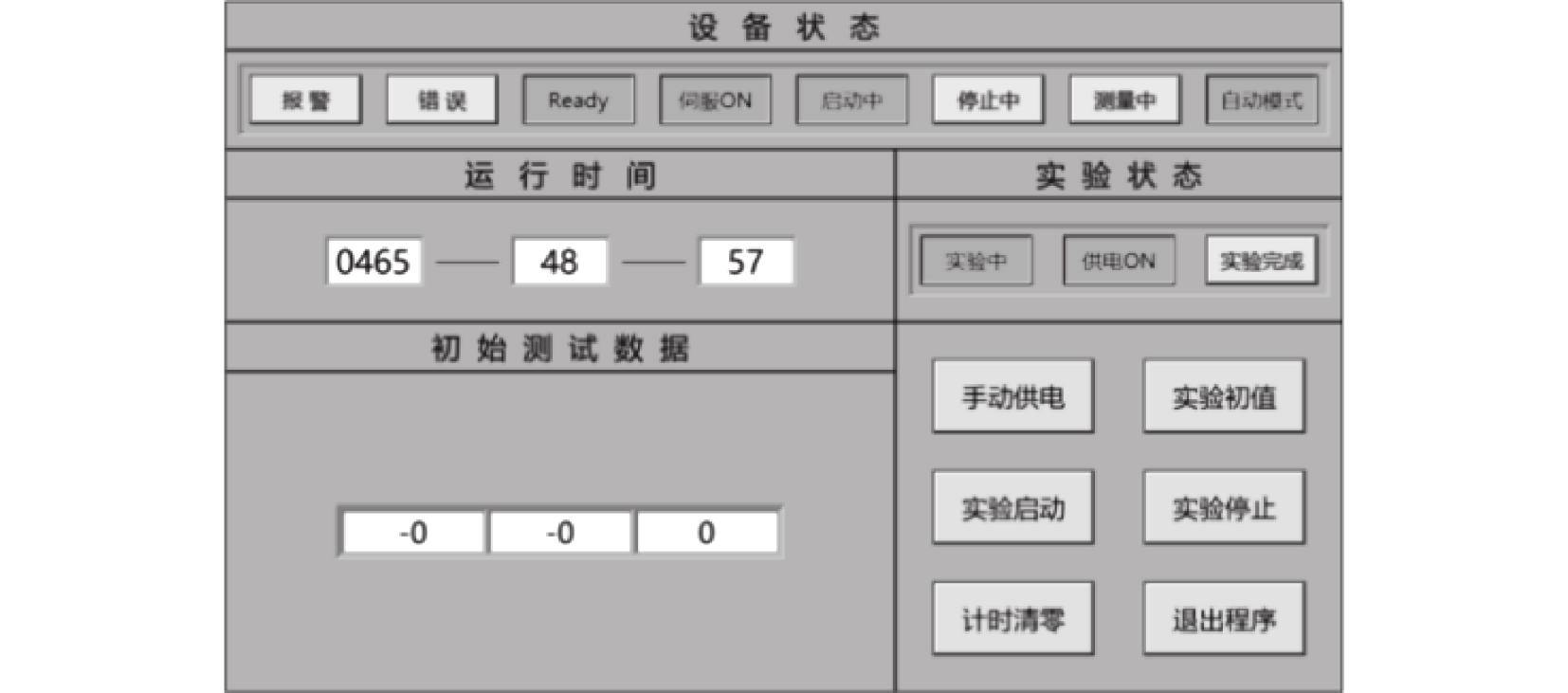
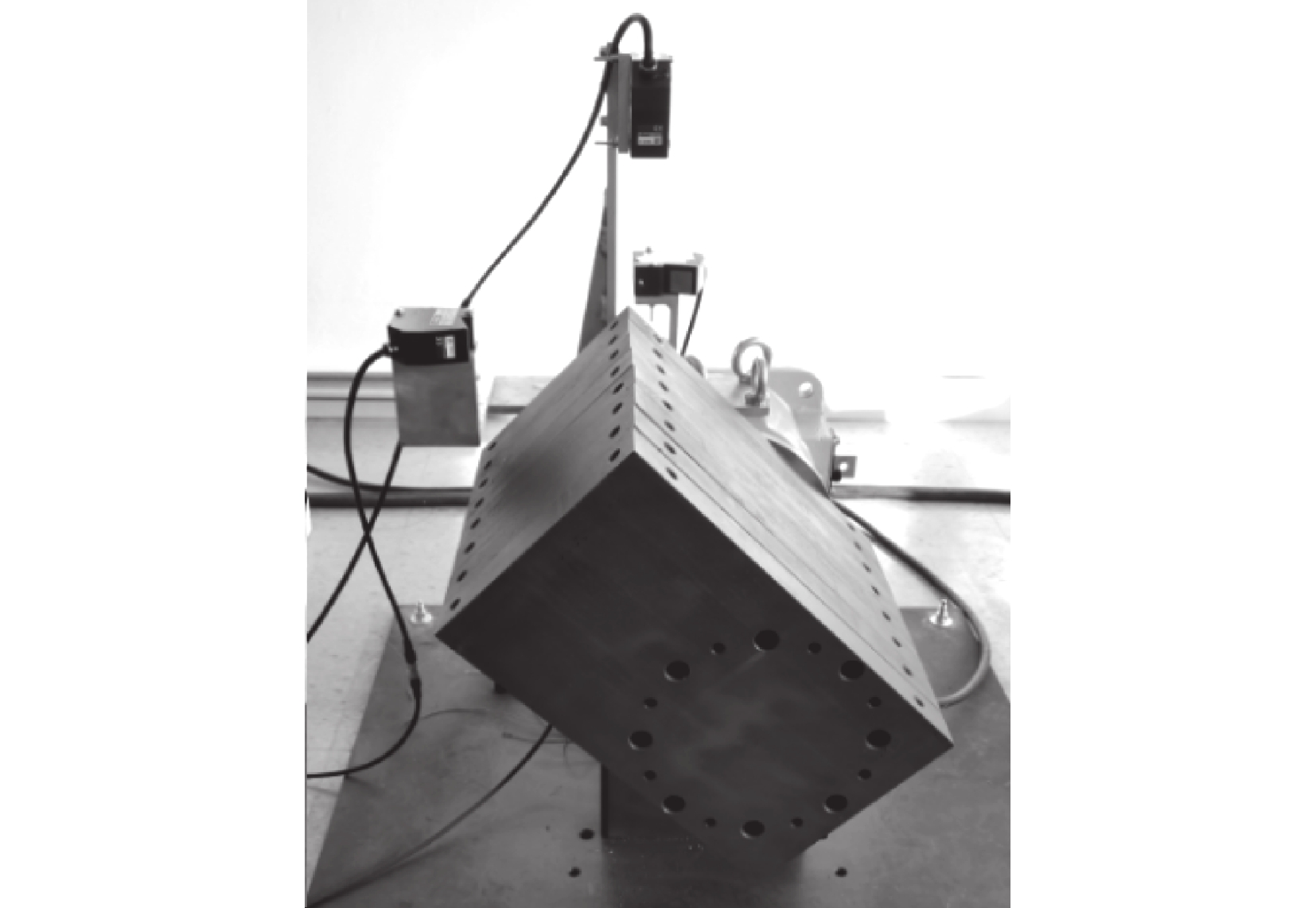
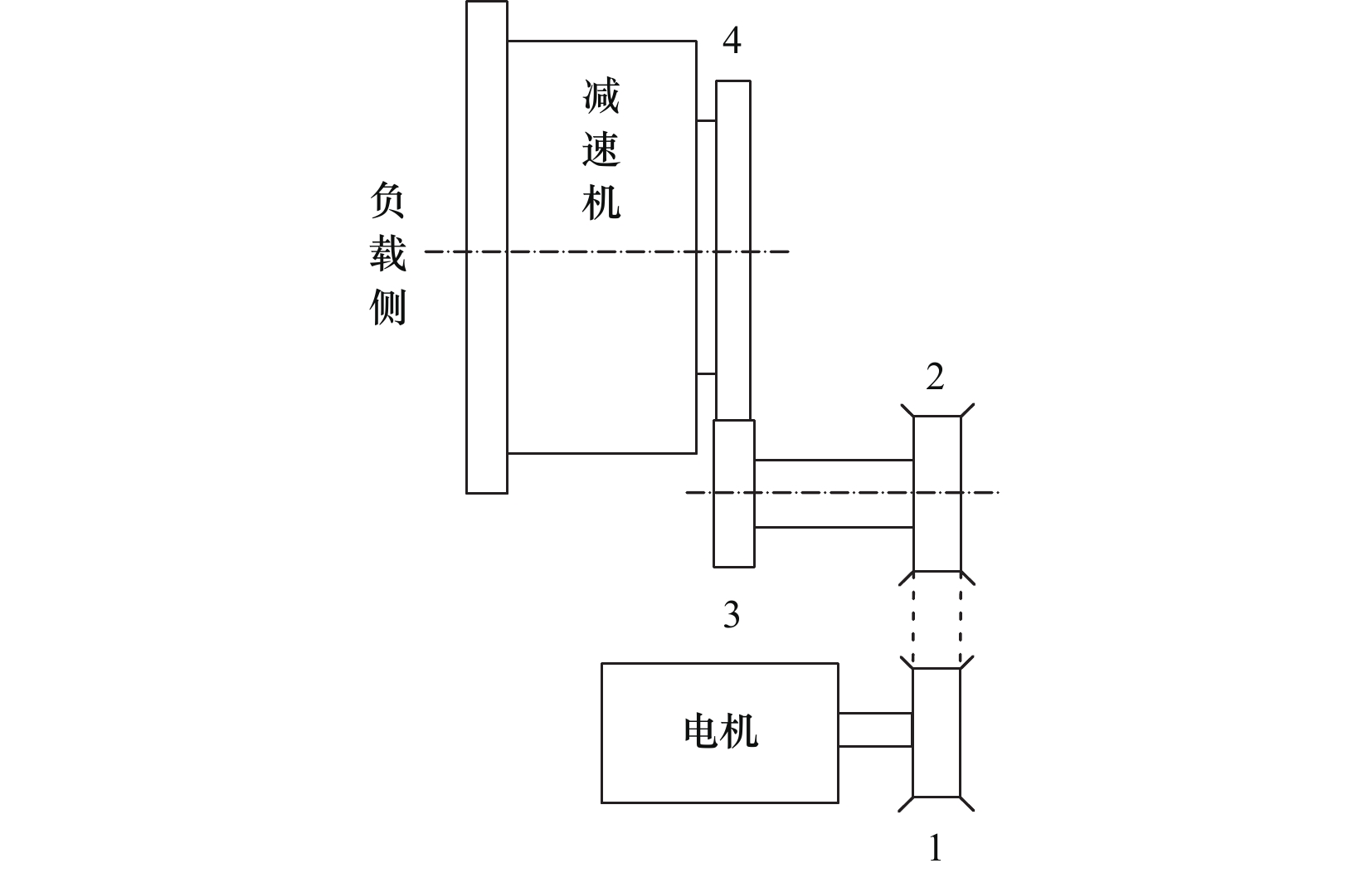
摘要: 设计了一款能够和机器人进行协调配合的变位机,建立起一套从负载侧到电机侧的计算方法和设计流程。上述设计主要包括性能指标制定、减速机和电机计算选型、传动系统设计计算,并采用有限元分析优化关键零部件的结构设计。为了验证变位机的实际性能,设计并实施了针对关键参数的实验测试,对变位机类产品的设计、验证具有重要的参考、借鉴意义。Abstract: The paper designs a positioner that can coordinate with the robot, and establishes a set of calculation methods and design processes which from the load side to the motor side. The above work mainly includes the formulation of performance indicators, the calculation and selection of reducers and motors, the design and calculation of transmission systems, and use finite element analysis to optimize the structural design of key components. In order to verify the actual performance of the positioner, the experimental test for key parameters is designed and implemented, which has important reference significance for the design and verification of positioner products.
-
Key words:
- industrial robot /
- positioner /
- type selection calculation /
- positioning accuracy
-
表 1 关键性能指标参数
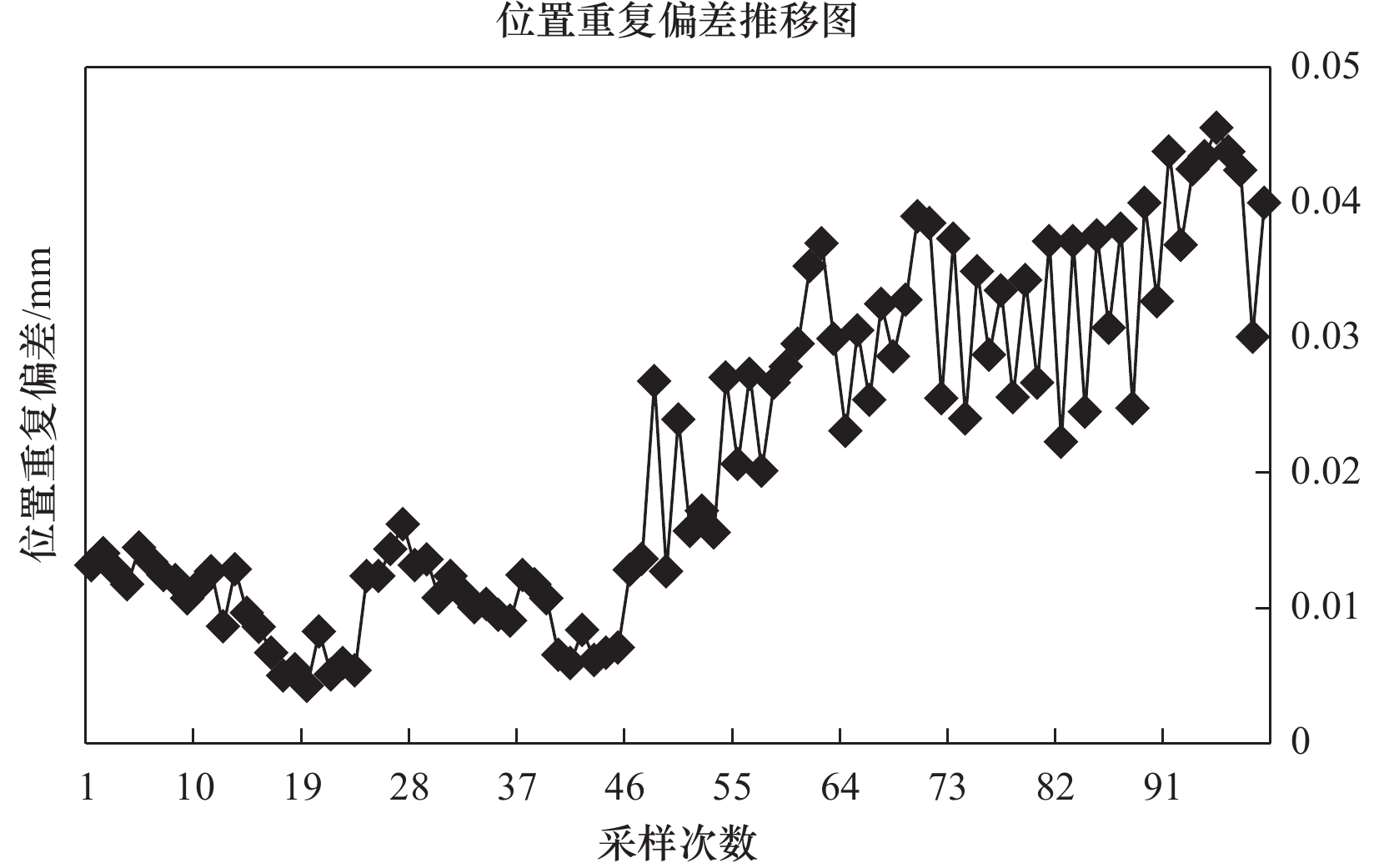
变位机关键性能参数 参数值 自由度 1 负载能力/kg 200 最大输出转速N/(r/min) 30 动作范围 ±3 600° 容许偏心距/m 0.07 位置重复性精度/mm ±0.05  下载: 导出CSV
下载: 导出CSV
-
[1] 王田苗, 陶永. 我国工业机器人技术现状与产业化发展战略[J]. 机械工程学报, 2014, 50(9): 1-13. [2] 孟明辉, 周传德, 陈礼彬, 等. 工业机器人的研发及应用综述[J]. 上海交通大学学报, 2016, 50(S1): 98-101. doi: 10.16183/j.cnki.jsjtu.2016.S.025 [3] NABTESCO. 精密控制用高刚性减速机技术资料集(CAT. 121020)[Z]. 东京: Nabtesco株式会社, 2014. [4] 陈永当, 鲍志强, 任慧娟, 等. 基于SolidWorks Simulation的产品设计有限元分析[J]. 计算机技术与发展, 2014, 22(9): 177-180. [5] 北京机械工业自动化研究所. GB/T 12642-2013 工业机器人 性能规范及其试验方法[S]. 北京: 中国国家标准化管理委员会, 2014 -

 下载:
下载:

 点击查看大图
点击查看大图
图(11) / 表(1)
计量
- 文章访问数: 92
- HTML全文浏览量: 12
- PDF下载量: 22
- 被引次数: 0


