

An improved WLSSVM modeling method for complex hysteresis characteristics of flexible joints
-
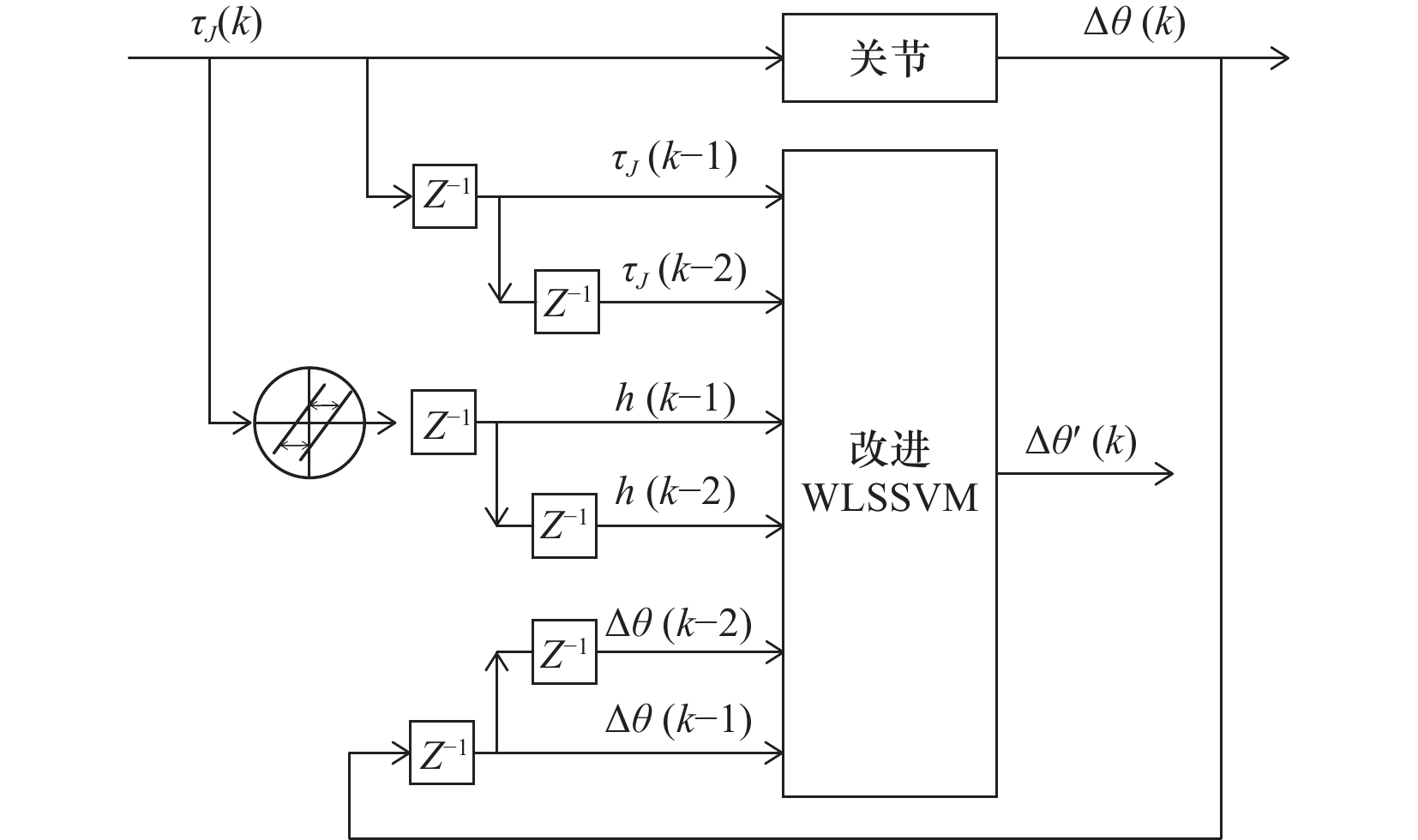
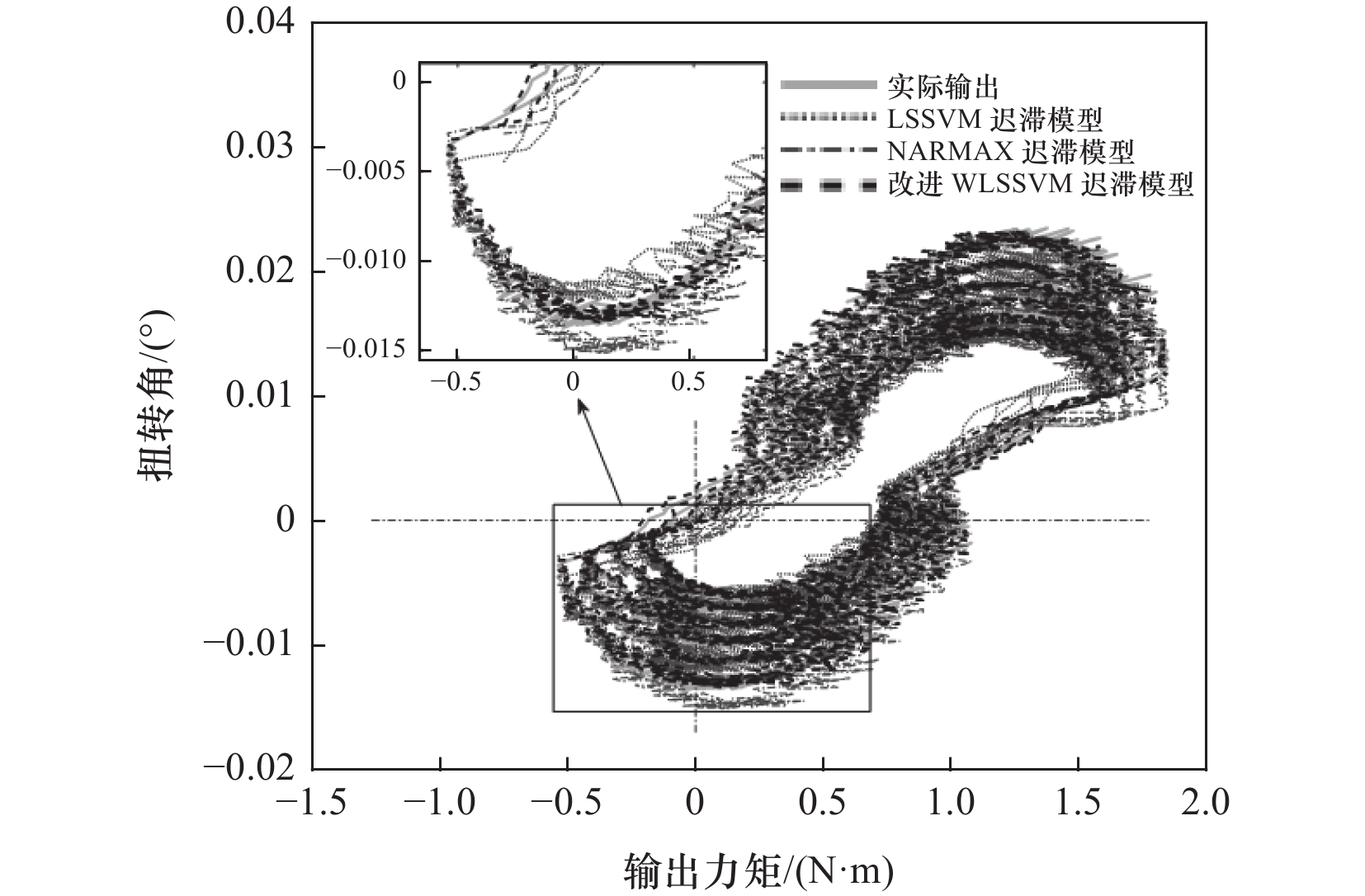
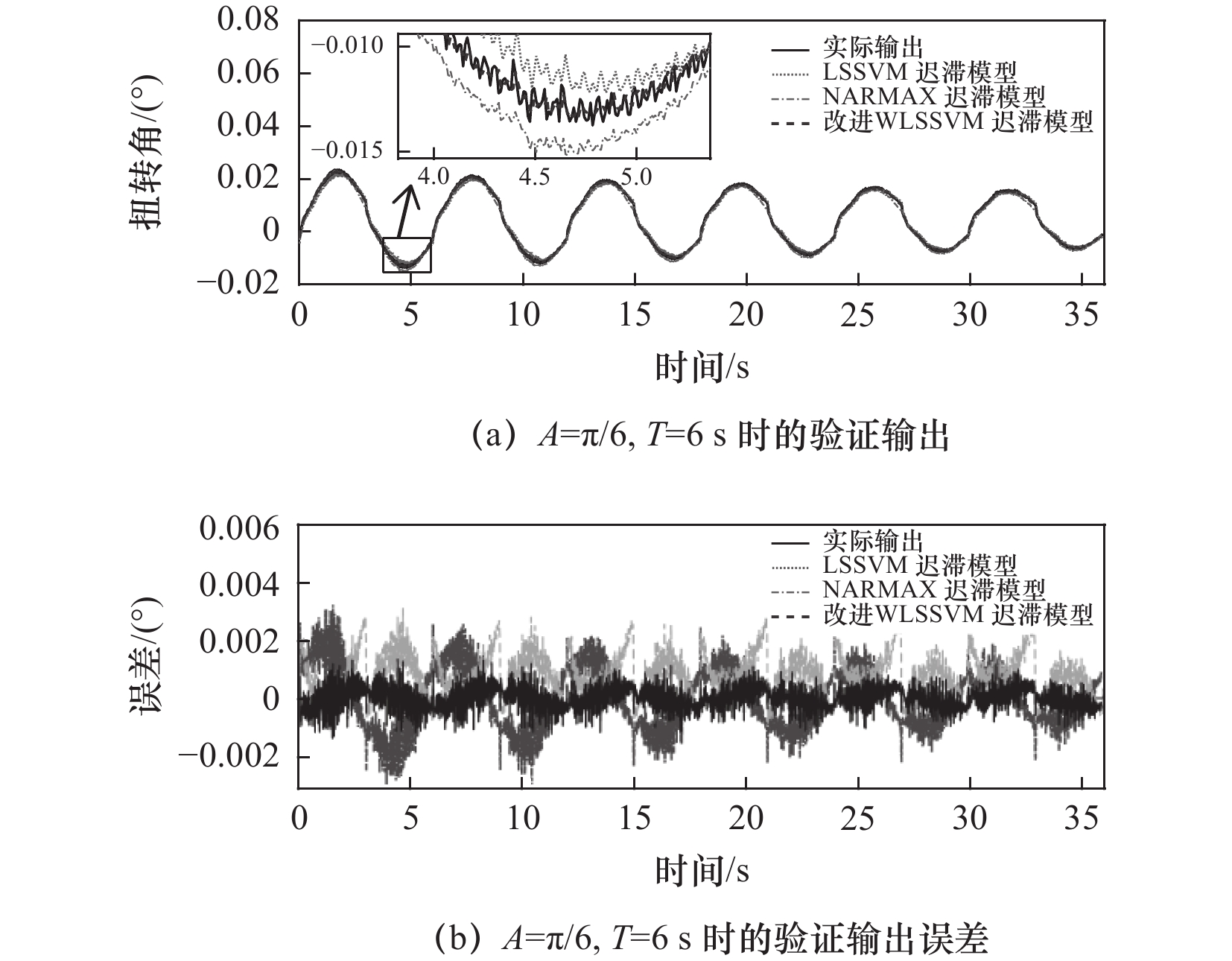
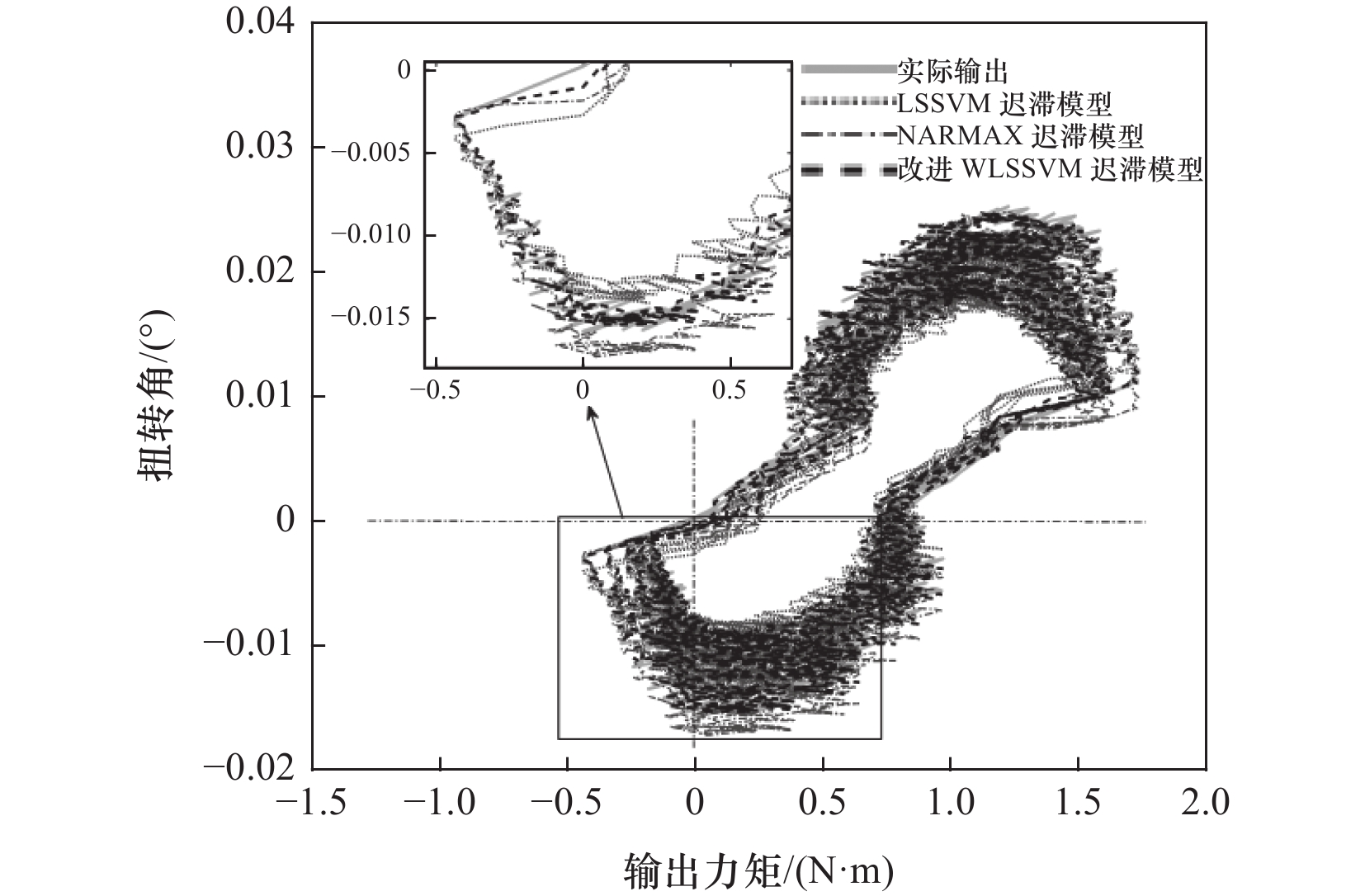
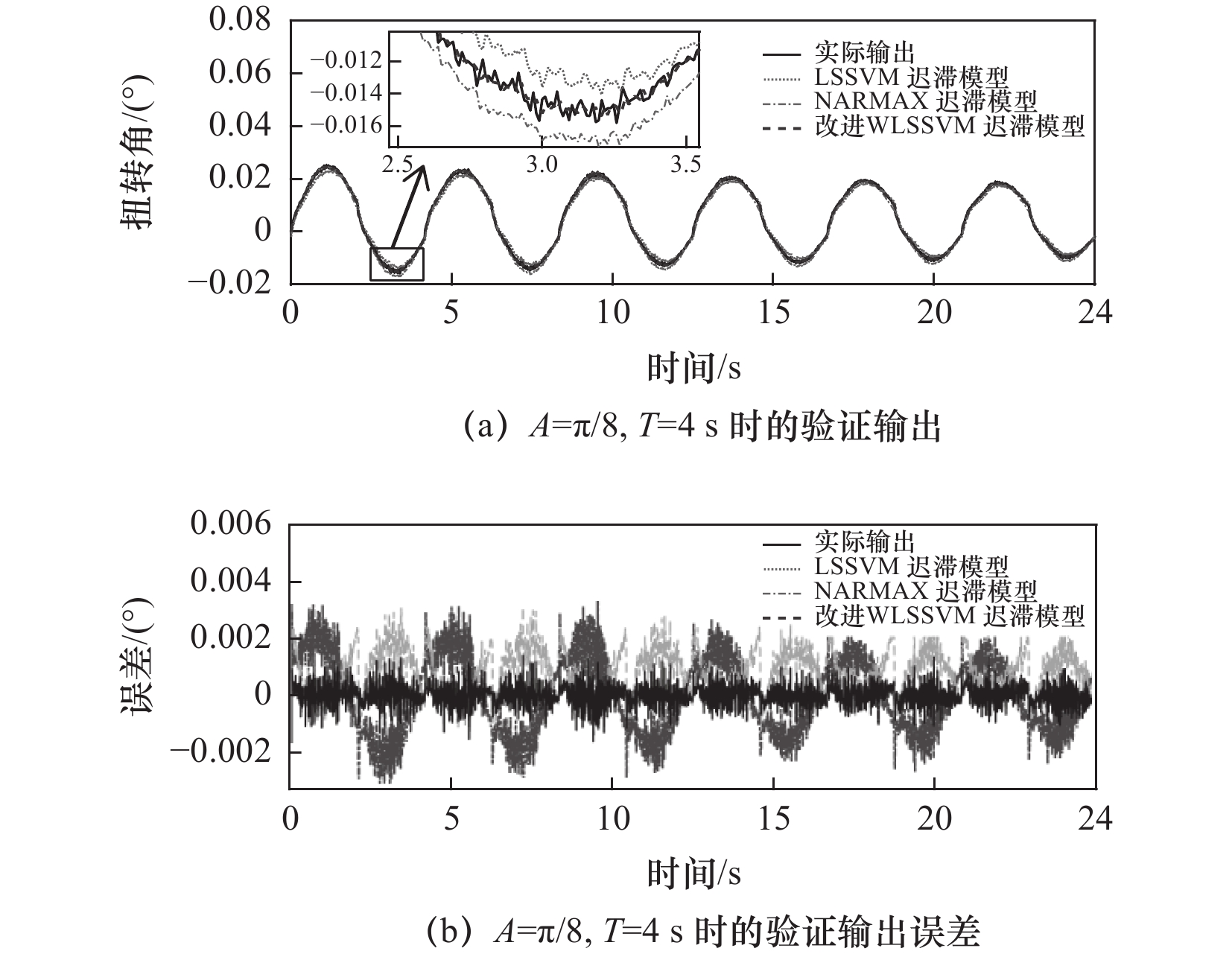
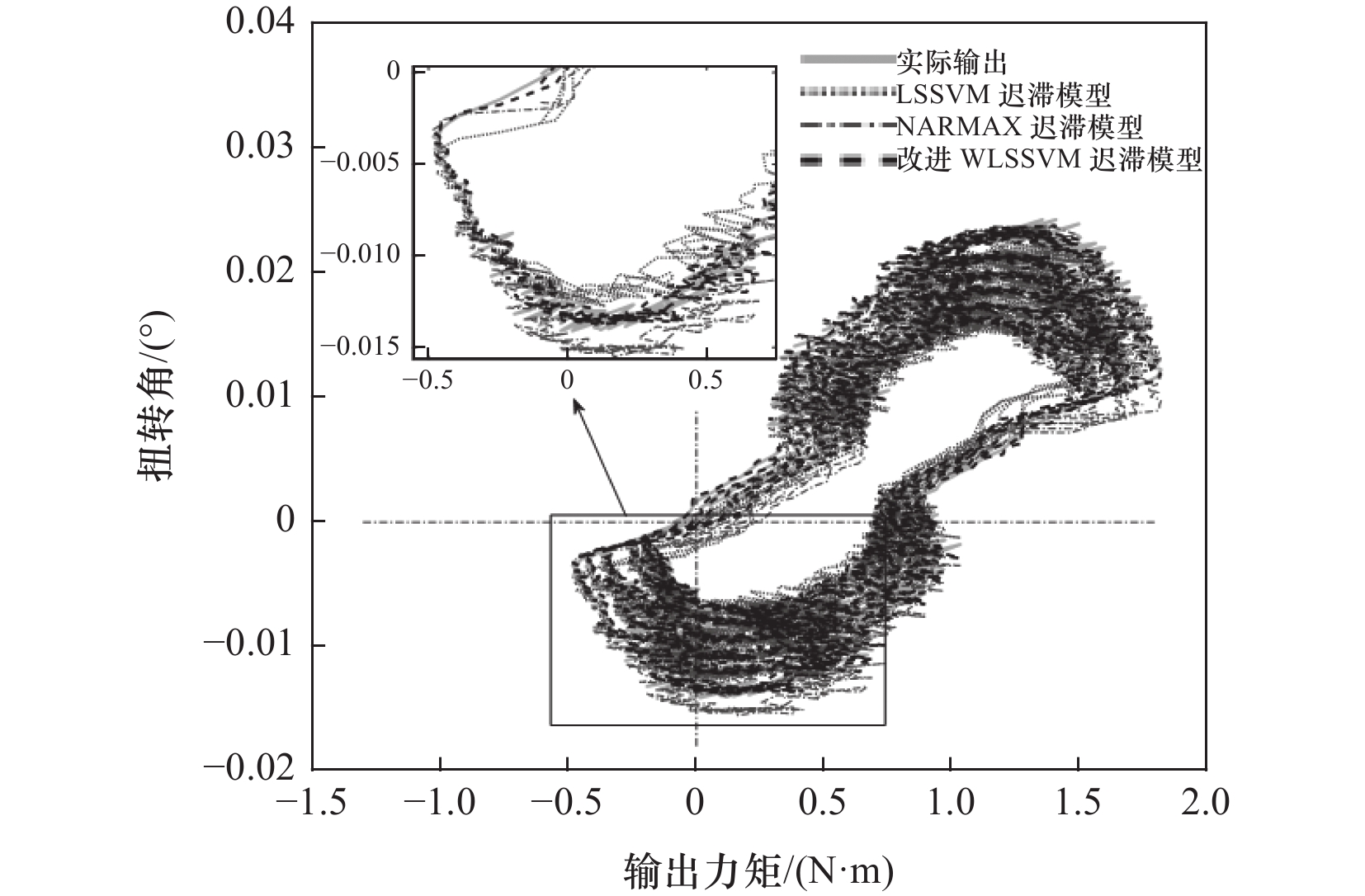
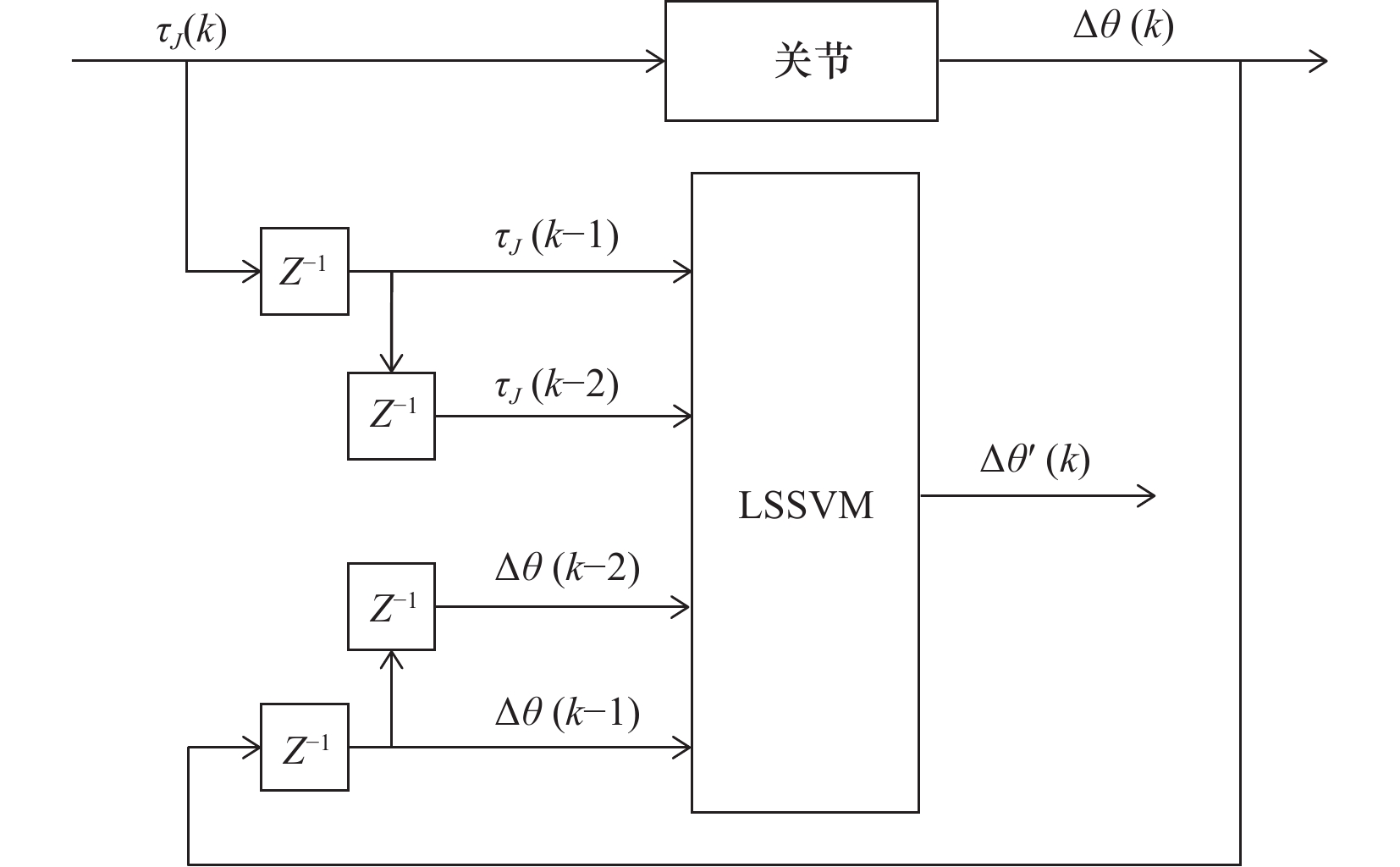
摘要: 针对协作机器人柔性关节传动过程中固有复杂迟滞特性影响执行精度的问题,提出基于中间变量的非线性自回归移动平均(NARMAX)结构的改进加权最小二乘支持向量机(WLSSVM)迟滞模型。引入PI算子产生中间变量,将迟滞的多值映射转换为单值映射,引入输出力矩和扭转角历史值,使模型具有动态特性;LSSVM求解问题时易受模型输出误差大的数据点影响,在目标优化函数中增加具有自适应调整因子的模型输出误差构成的正则项,达到进一步提高模型精度和抗干扰能力目的。以FRANKA协作机器人关节为对象进行建模与验证,实验结果表明,相比LSSVM迟滞模型和NARMAX迟滞模型,改进WLSSVM迟滞模型具有较高的模型精度。Abstract: Aiming at the problem that the inherent complex hysteresis characteristics in the transmission process for the flexible joints of collaborative robots seriously affect the execution accuracy, an improved weighted least squares support vector machine (WLSSVM) hysteresis model based on a nonlinear auto-regressive moving average with intermediate variables (NARMAX) structure is proposed. The PI operator is introduced as the intermediate variable to convert the multi-mapping of hysteretic into single-mapping, and the introduction of historical values of output torque and torsion angle makes the model have dynamic characteristics. The LSSVM is susceptible to the influence of data points with large model output errors when solving the problem, hence a regular term composed of model output errors with an adaptive adjustment factor is added to the objective optimization function to further improve the model accuracy and anti-interference capability. The proposed hysteresis model has been verified on the FRANKA collaborative robot platform. Compared with the LSSVM hysteresis model and the NARMAX hysteresis model, the improved WLSSVM hysteresis model has higher model accuracy.
-
表 1 不同周期和幅度下的模型验证结果对比
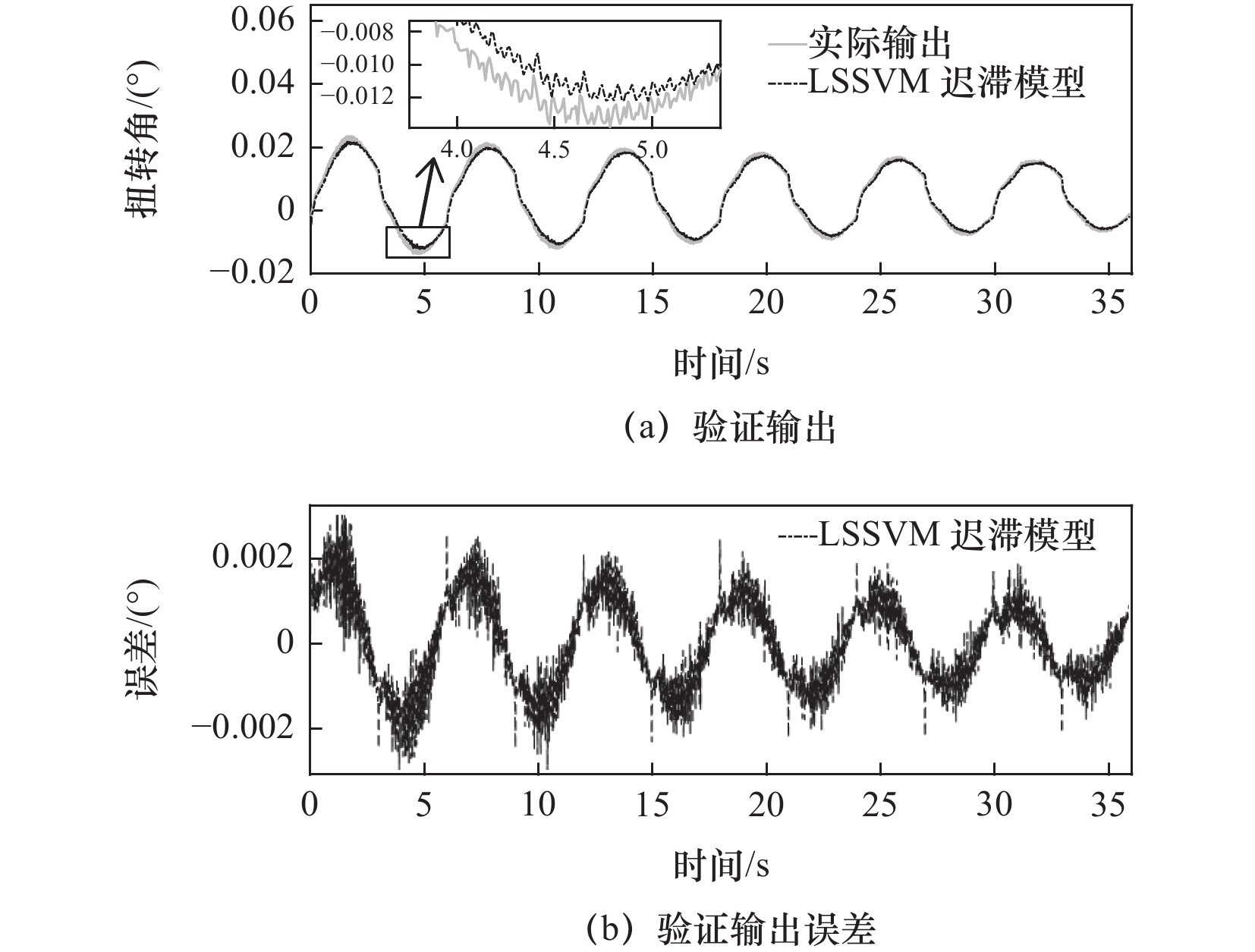
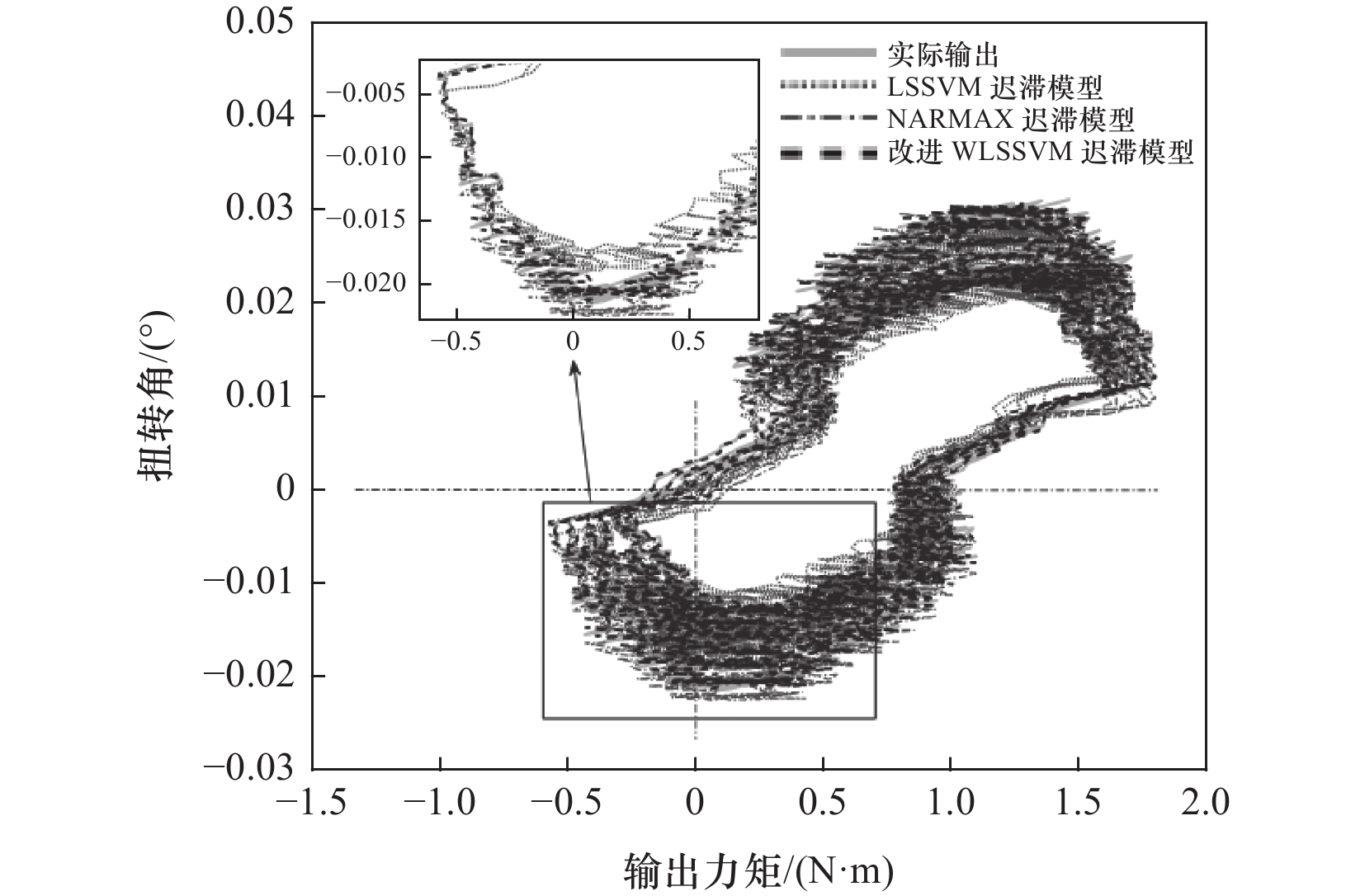
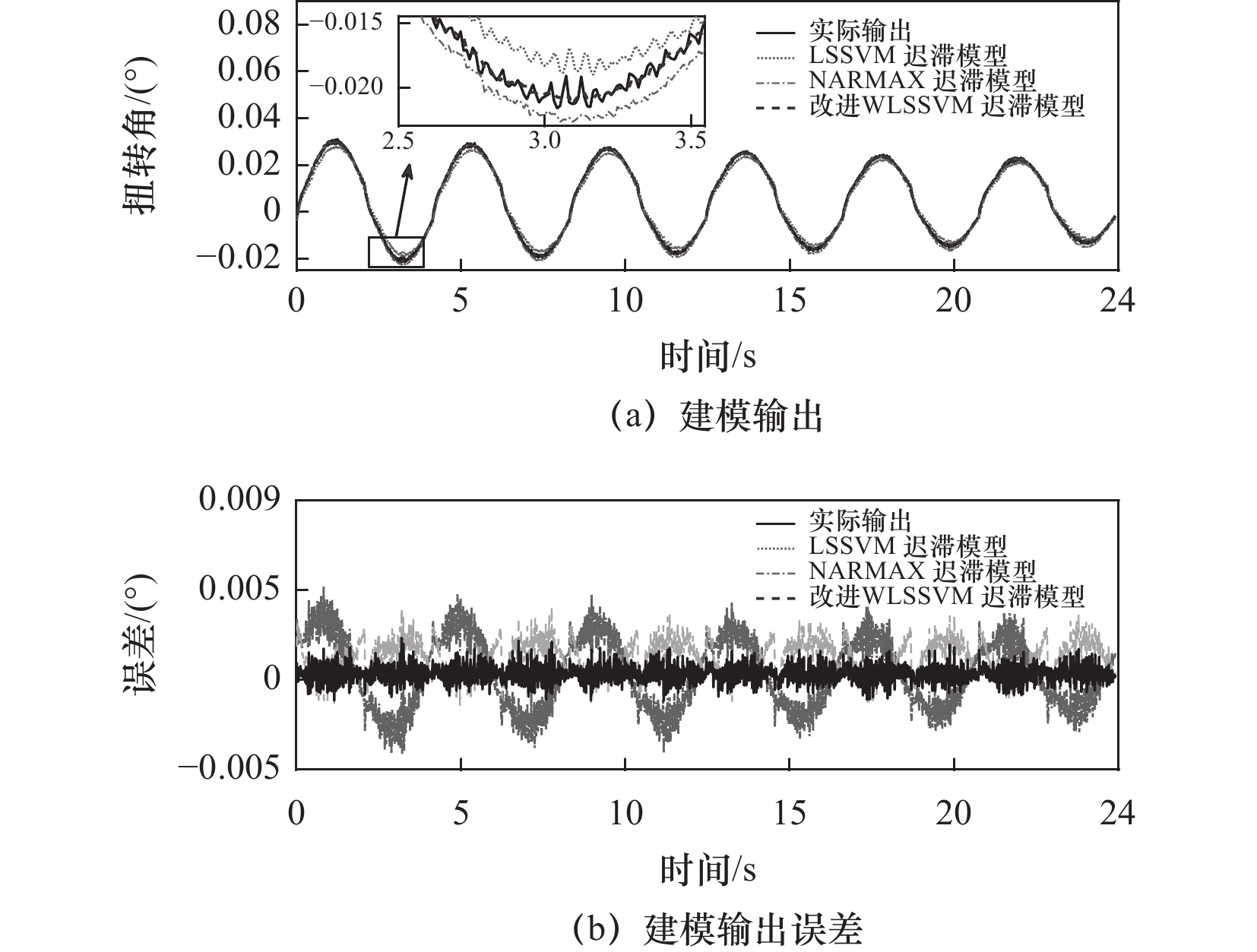
模型 $A = {{\text{π}} \mathord{\left/ {\vphantom {{\text{π}} 6}} \right. } 6}$, $T = 6{\text{ } }{\rm{s}}$ $A = {{\text{π}} \mathord{\left/ {\vphantom {{\text{π}} 8}} \right. } 8}$, $T = 4{\text{ } }{\rm{s}}$ $A = {{\text{π}} \mathord{\left/ {\vphantom {{\text{π}} 7}} \right. } 7}$, $T = 5{\text{ } }{\rm{s}}$ MAE/(°) RMSE MAE/(°) RMSE MAE/(°) RMSE LSSVM迟滞模型 0.003 24 0.001 06 0.003 32 0.001 32 0.003 31 0.001 14 NARMAX迟滞模型[16] 0.003 13 0.001 11 0.003 12 0.001 14 0.003 22 0.001 10 改进WLSSVM迟滞模型 0.001 39 0.000 41 0.001 65 0.000 41 0.001 74 0.000 40  下载: 导出CSV
下载: 导出CSV
-
[1] 石崟, 尹华川, 李俊阳, 等. 谐波减速器摩擦特性建模及参数辨识[J]. 东北大学学报:自然科学版, 2022, 43(1): 89-96,110. [2] 秦永晋, 刘丹丹, 付力扬, 等. 谐波减速器用柔性轴承综合性能试验机的研制[J]. 制造技术与机床, 2021(12): 21-25. doi: 10.19287/j.cnki.1005-2402.2021.12.003 [3] 陈龙, 易琼洋, 贲彤, 等. 全局优化算法在Preisach磁滞模型参数辨识问题中的应用与性能对比[J]. 电工技术学报, 2021, 36(12): 2585-2593, 2606. [4] 秦岩丁, 徐圆凯, 韩建达. 气动人工肌肉驱动的肘关节辅助机器人迟滞补偿[J]. 机器人, 2021, 43(4): 453-462. doi: 10.13973/j.cnki.robot.200534 [5] Chen W H, Zhou L B, Wang J H, et al. A Maxwell-Slip based hysteresis model for nonlinear stiffness compliant actuators[J]. IEEE Transactions on Industrial Electronics, 2022, 69(11): 11510-11520. doi: 10.1109/TIE.2021.3121697 [6] Song Z B, Gao D, Zhao Y R, et al. An improved Bouc–Wen model based on equitorque discretization for a load-dependent nonlinear stiffness actuator[J]. IEEE Transactions on Automation Science and Engineering, 2020, 18(2): 840-849. [7] Gan J Q, Mei Z, Chen X L, et al. A modified Duhem model for rate-dependent hysteresis behaviors[J]. Micromachines, 2019, 10(10): MI10100680. [8] Wu Y N, Fang Y C, Liu C H, et al. Gated recurrent unit based frequency-dependent hysteresis modeling and end-to-end compensation[J]. Mechanical Systems and Signal Processing, 2020, 136: 106501. doi: 10.1016/j.ymssp.2019.106501 [9] Huang L S, Hu Y, Zhao Y, et al. Modeling and control of IPMC actuators based on LSSVM-NARX paradigm[J]. Mathematics, 2019, 7(8): math7080741. [10] 严秀权, 吴洪涛, 李耀, 等. 压电作动器的支持向量机迟滞模型[J]. 仪器仪表学报, 2018, 39(9): 228-235. doi: 10.19650/j.cnki.cjsi.J1803517 [11] 谢胜龙, 张文欣, 鲁玉军, 等. 气动肌肉的最小二乘支持向量机迟滞模型[J]. 计量学报, 2020, 41(4): 441-447. doi: 10.3969/j.issn.1000-1158.2020.04.09 [12] 钱承, 殷小亮. 基于频率相关的压电作动器迟滞特性建模及参数辨识[J]. 传感技术学报, 2020, 33(5): 699-704. doi: 10.3969/j.issn.1004-1699.2020.05.013 [13] 尚爱鹏, 王贞艳, 贺一丹. 基于最小二乘支持向量机的压电陶瓷作动器内模控制[J]. 传感技术学报, 2020, 33(9): 1254-1258. doi: 10.3969/j.issn.1004-1699.2020.09.005 [14] Poursaeed A H, Namdari F. Real-time voltage stability monitoring using weighted least square support vector machine considering overcurrent protection[J]. International Journal of Electrical Power & Energy Systems, 2022, 136: 107690. [15] Xue J K, Shen B. A novel swarm intelligence optimization approach: sparrow search algorithm[J]. Systems Science & Control Engineering, 2020, 8(1): 22-34. [16] Yu Y W, Zhang C, Wang Y F, et al. Neural network-based iterative learning control for hysteresis in a magnetic shape memory alloy actuator[J]. IEEE/ASME Transactions on Mechatronics, 2021, 27(2): 928-939. -

 下载:
下载:


 点击查看大图
点击查看大图
图(11) / 表(1)
计量
- 文章访问数: 135
- HTML全文浏览量: 10
- PDF下载量: 16
- 被引次数: 0


