

Based on falling mechanism chaotic sparrow algorithm of AGV path planning
-
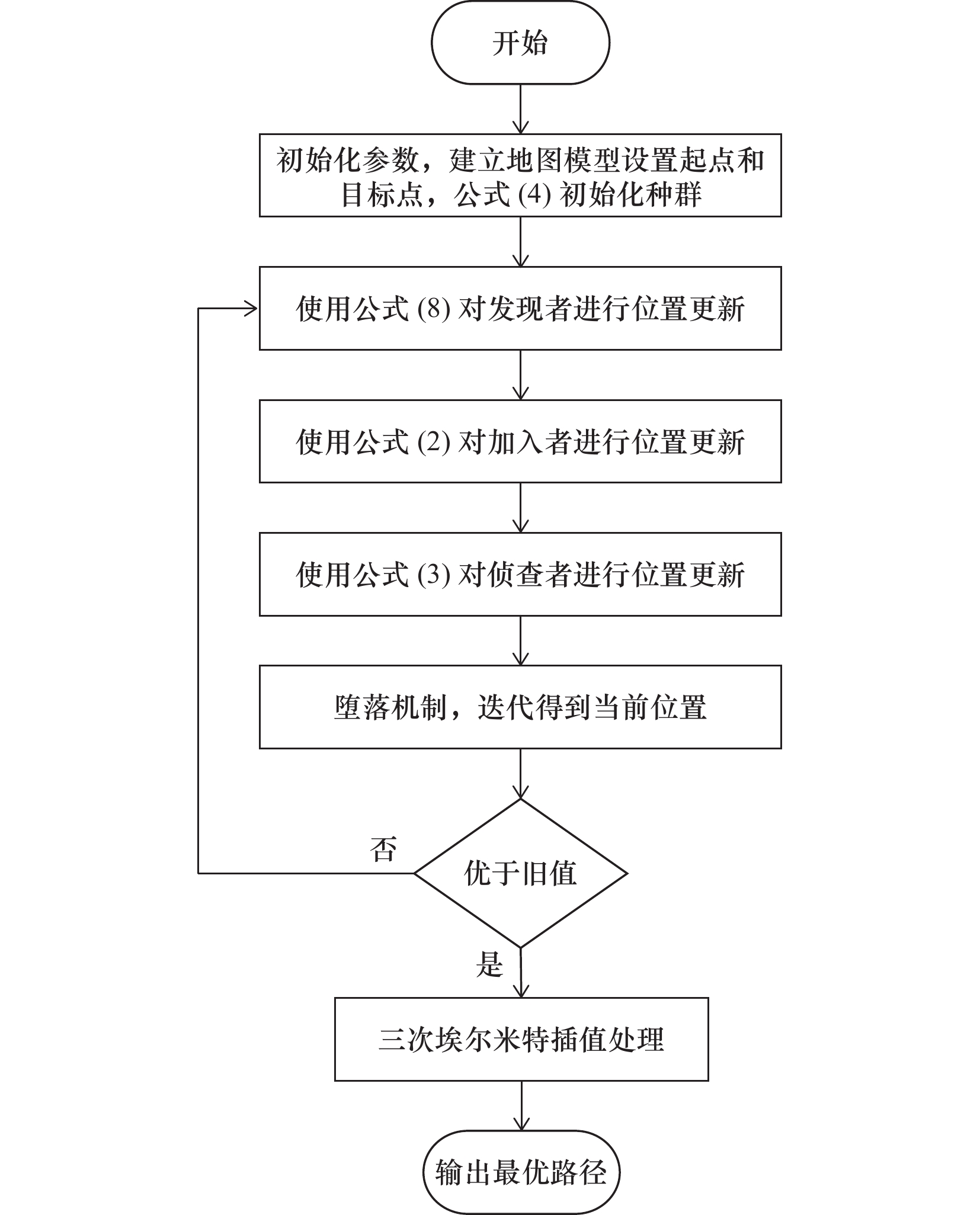
摘要: 针对麻雀搜索算法(SSA)在AGV路径规划中存在收敛速度慢、寻优精度差的缺点,提出一种基于坠落机制的混沌麻雀算法(SSA-CD)解决AGV路径规划算法。首先,引入Sinusoidal混沌映射和变尺度混沌策略对种群进行初始化,提高种群多样性使算法具备跳出局部最优解的能力;其次,引入动态黄金正弦策略增强算法发现者位置更新方式;然后,提出一种坠落机制增强种群随机性;最后,通过埃尔米特插值进一步优化最优解,获得更短更平滑的路径。通过栅格地图进行仿真实验,证明了改进算法的有效性、可行性和鲁棒性。Abstract: To address the drawbacks of slow convergence speed and poor finding accuracy of sparrow search algorithm (SSA) in AGV path planning, a chaotic sparrow algorithm based on the falling mechanism(SSA-CD) is proposed to solve the AGV path planning algorithm. Firstly, Sinusoidal chaos mapping and variable scale chaos strategy are introduced to initialize the population and improve the population diversity so that the algorithm has the ability to jump out of the local optimal solution. Finally, the optimal solution is further optimized by hermite interpolation to obtain shorter and smoother path paths. The effectiveness, feasibility and robustness of the improved algorithm are demonstrated by simulation experiments with raster maps.
-
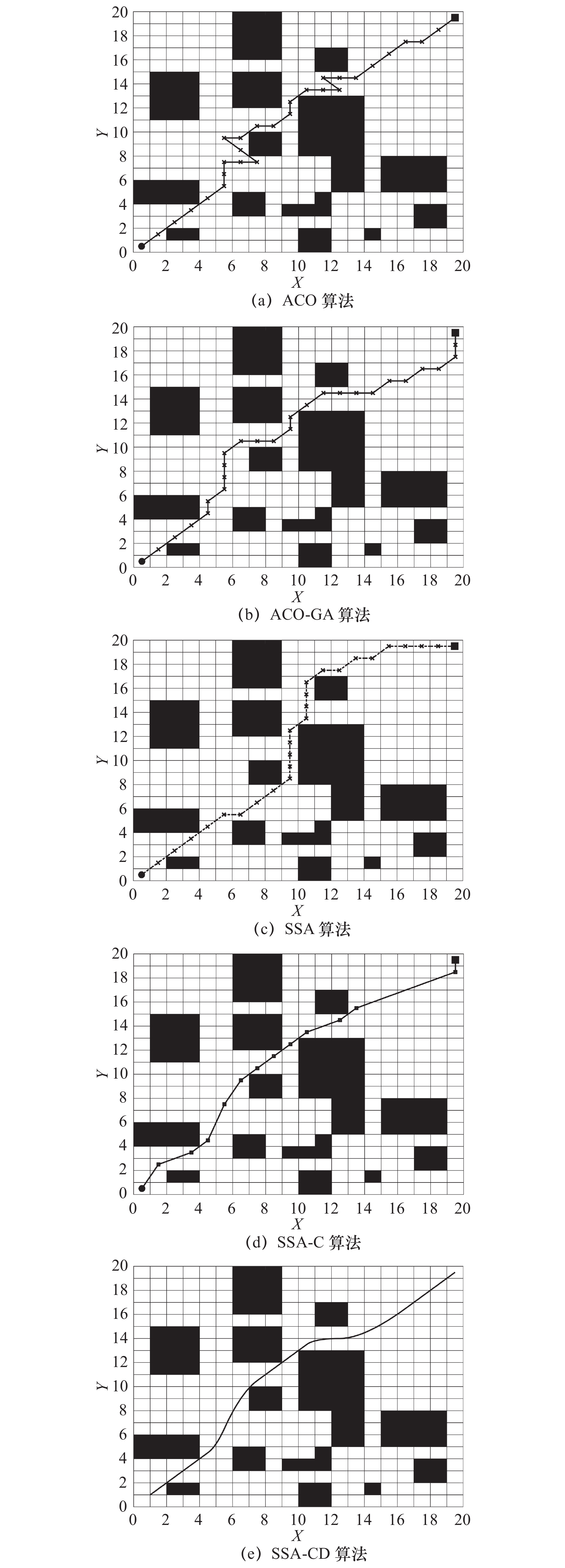
表 1 4种算法数据结果
算法 路径长度/m 运行时间/s 迭代次数 ACO算法 34.34 12.45 63 ACO-GA算法 32.62 45.56 44 SSA算法 28.38 11.81 65 SSA-C算法 28.22 9.67 46 SSA-CD算法 27.20 8.95 40  下载: 导出CSV
下载: 导出CSV
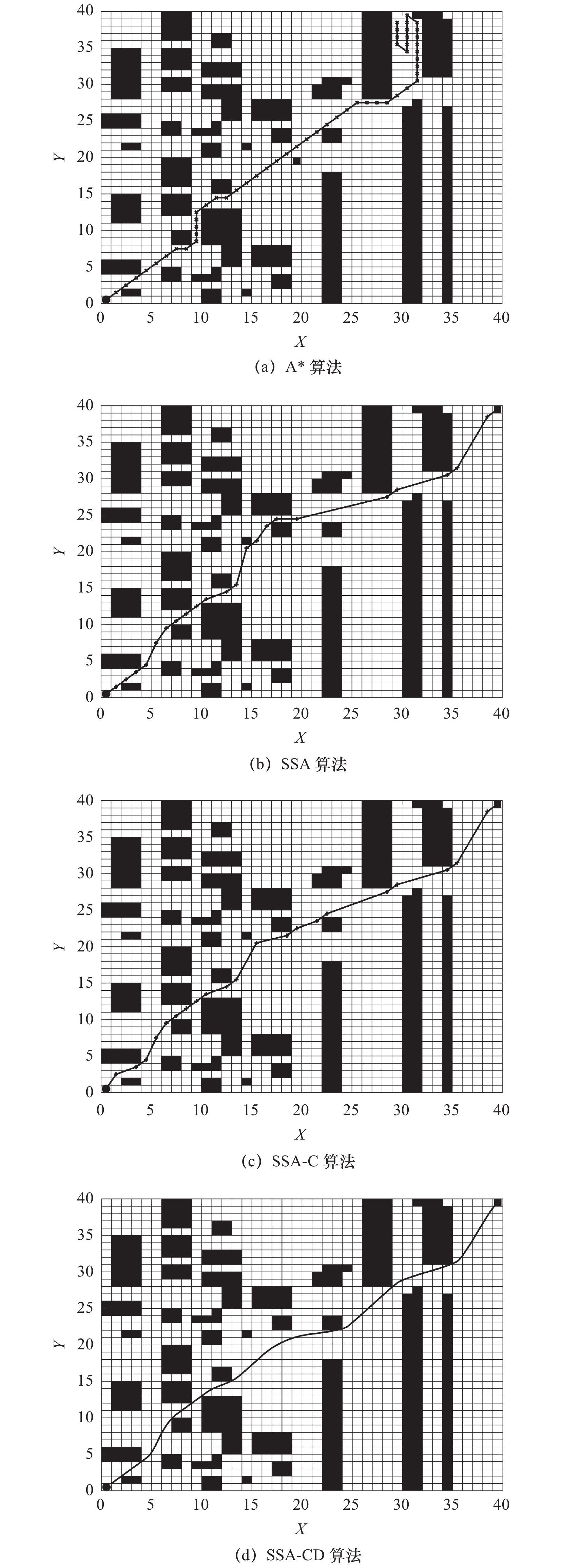
表 2 4种算法数据结果
算法 路径长度/m 运行时间/s 迭代次数 A*算法 - 50.56 - SSA算法 66.37 23.36 74 SSA-C算法 60.42 16.57 42 SSA-CD算法 57.92 16.31 38
下载: 导出CSV
-
[1] 郭超, 陈香玲, 郭鹏, 等. 基于时空A*算法的多AGV无冲突路径规划[J]. 计算机系统应用, 2022, 31(4): 360-368. doi: 10.15888/j.cnki.csa.008454 [2] 李钧泽, 孙咏, 焦艳菲, 等. 基于改进人工势场的AGV路径规划算法[J]. 计算机系统应用, 2022, 31(3): 269-274. [3] Zhao Q , Zhen Z, Gao C, et al. Path planning of UAVs formation based on improved ant colony optimization algorithm[C]. Proceedings of 2014 IEEE Chinese Guidance, Navigation and Control Conference. IEEE, 2015: 1549−1552. [4] Xue J, Shen B. A novel swarm intelligence optimization approach: sparrow search algorithm[J]. Systems ence & Control Engineering An Open Access Journal, 2020, 8(1): 22-34. [5] 宋立业, 胡朋举. 改进SSA在三维路径规划中的应用[J]. 传感器与微系统, 2022, 41(3): 158-160. doi: 10.13873/J.1000-9787(2022)03-0158-03 [6] 魏晓鸽, 赵冠军. 基于改进麻雀搜索算法的疏散路径规划[J]. 消防科学与技术, 2022, 41(2): 221-226. doi: 10.3969/j.issn.1009-0029.2022.02.016 [7] 齐鹏飞, 丁鑫. 基于多元策略改进的灰狼算法机器人路径规划[J]. 制造技术与机床, 2022(7): 28-33. doi: 10.19287/j.mtmt.1005-2402.2022.07.005 [8] Tanyildizi E, Demir G. Golden sine algorithm: a novel math-inspired algorithm[J]. Advances in Electrical and Computer Engineering, 2017, 17(2): 71-78. doi: 10.4316/AECE.2017.02010 [9] 李虹, 刘松, 孙志毅, 等. 基于非均匀B样条曲线的挖掘机最优时间轨迹规划[J]. 中国工程机械学报, 2021, 19(4): 302-306. [10] 谢春丽, 高胜寒, 孙学志. 融合改进A*算法和贝塞尔曲线优化的路径规划算法[J]. 重庆理工大学学报: 自然科学, 2022, 36(7): 177-187. [11] 潘昕, 吴旭升, 侯新国, 等. 基于遗传蚂蚁混合算法的AUV全局路径规划[J]. 华中科技大学学报:自然科学版, 2017, 45(5): 45-49,76. [12] 陈鑫, 肖明清, 文斌成, 等. 基于变分模态分解和混沌麻雀搜索算法优化支持向量机的滚动轴承故障诊断[J]. 计算机应用, 2021, 41(S2): 118-123. -

 下载:
下载:



 点击查看大图
点击查看大图
图(7) / 表(2)
计量
- 文章访问数: 85
- HTML全文浏览量: 12
- PDF下载量: 22
- 被引次数: 0


