

Study on tracking precision characteristics of ball screw feed system under different set-trajectory conditions
-
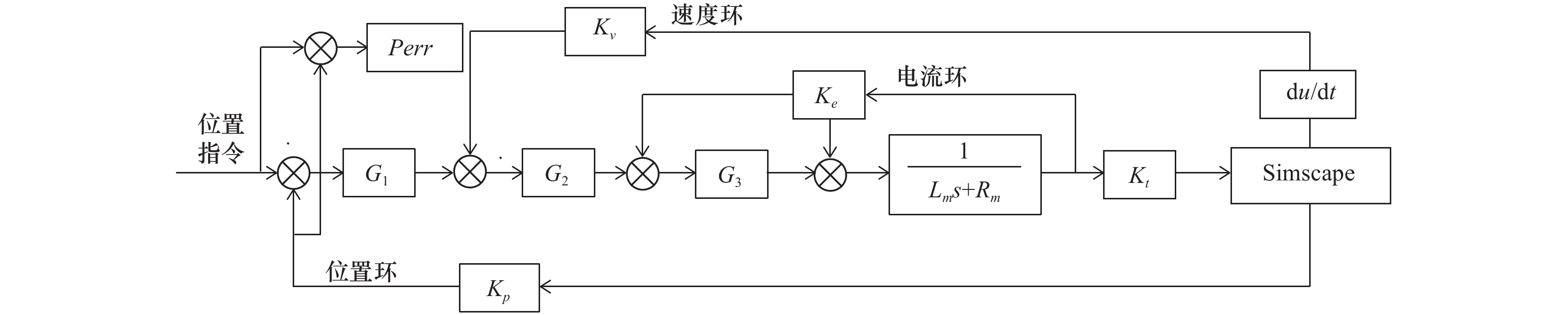
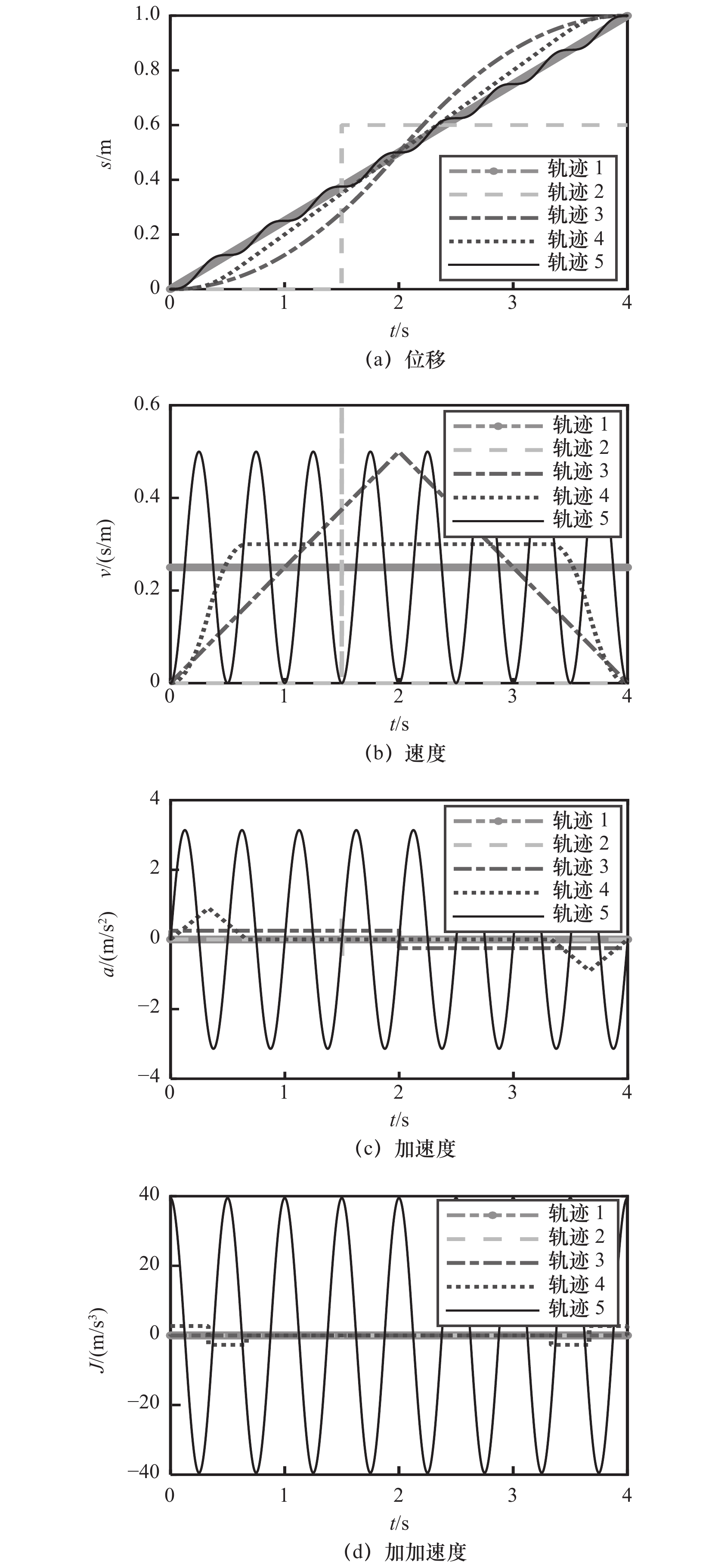
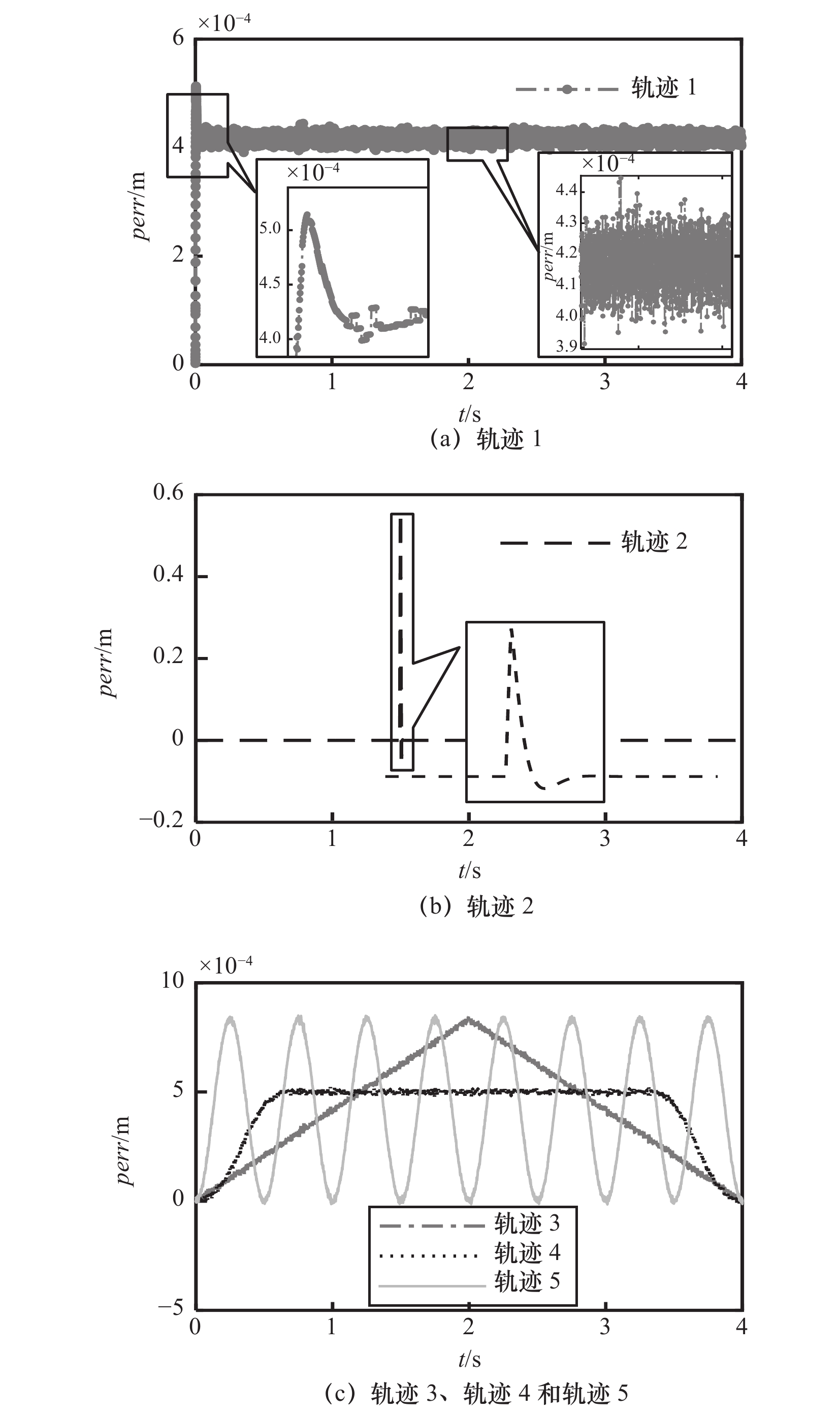
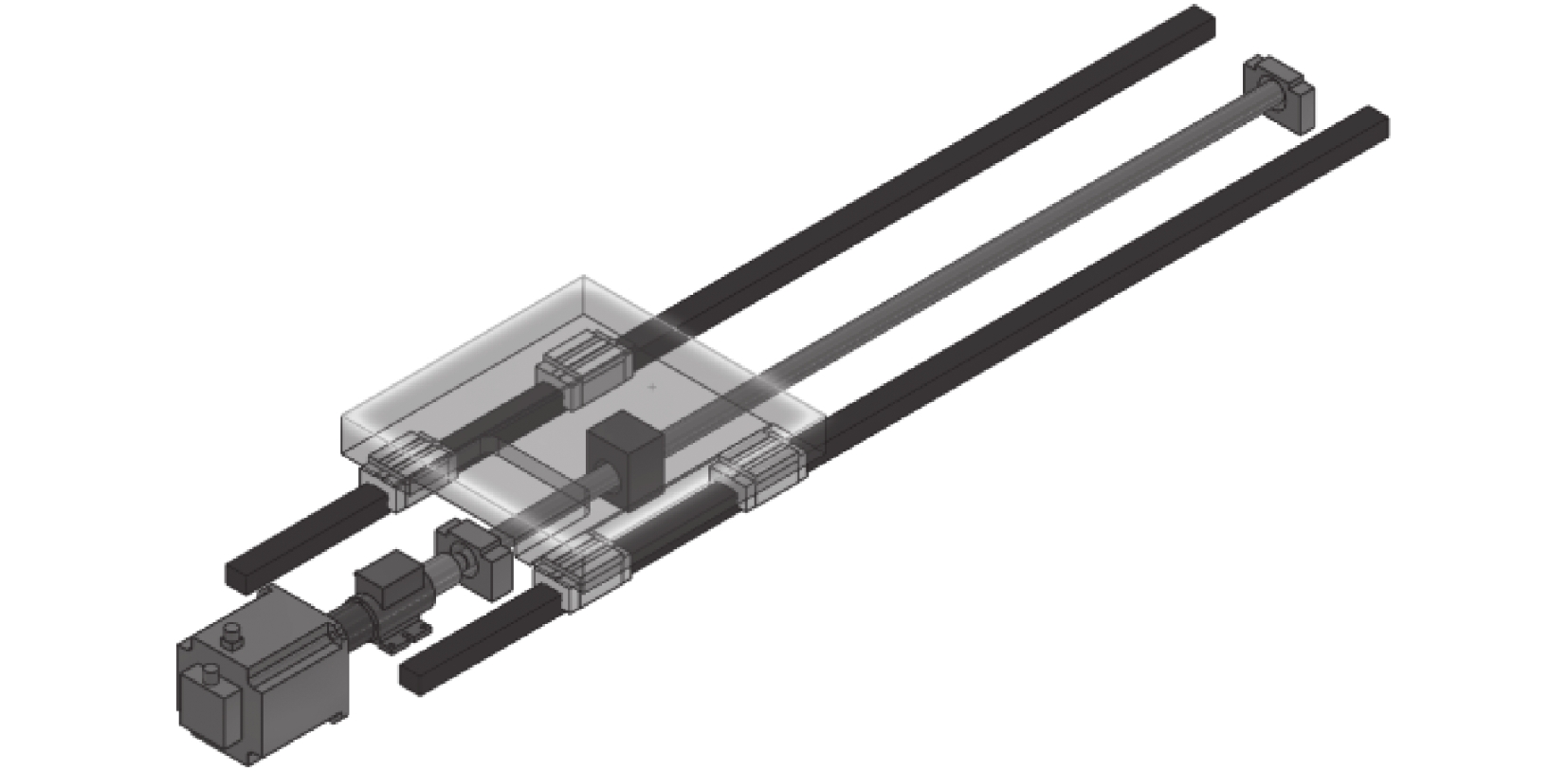
摘要: 滚珠丝杠进给系统是高档数控机床重要部件,其运动精度决定了多轴联动加工机床的加工精度,在高速、高精度滚珠丝杠进给系统中,其指令轨迹参数是影响运动精度的重要因素。基于Simulink和Simscape搭建滚珠丝杠进给系统半物理机电耦合仿真模型,考虑不同指令轨迹参数,开展运动精度仿真及分析。结果显示,指令轨迹的位置、速度和加速度等参数对滚珠丝杠进给系统运动精度有重要影响,因此,在多轴联动加工机床中,合理规划进给系统轨迹参数对于提高其运动精度具有重要意义。Abstract: Ball screw feed system is an important part of high-grade numerical control machine tool, and its motion accuracy determines the processing accuracy of multi-axis machining machine tool. In the high-speed and high-precision ball screw feed system, its set-trajectory parameter is an important factor affecting the motion accuracy. In this paper, a semi-physical electromechanical coupling simulation model of ball screw feed system was built based on Simulink and Simscape, and motion accuracy simulation and analysis were carried out considering different command trajectory parameters. The results show that the position, velocity, and acceleration of the command trajectory have an important impact on the motion accuracy of the ball screw feed system. Therefore, in the multi-axis linkage machining machine tool, reasonable planning of the feed system trajectory parameters is of great significance to improve its motion accuracy.
-
表 1 运动副刚度
连接类型 轴承 丝杠螺母 导轨滑块 刚度 Kbx/Kby/Kbz Knx/Kny/Knz Kgy/Kgz 值/(N/μm) 20.6/10.6/10.6 50.2/30.5/30.5 58.5/45.3  下载: 导出CSV
下载: 导出CSV
表 2 结构件参数
结构件 丝杠 工作台 结构参数/m 长度:1.6 长度:0.6 直径:0.08 宽度:0.6 节距:0.016 厚度:0.2 弹性模量/Pa 2.1×1011 2.1×1011 泊松比 0.3 0.3 密度/(kg/m3) 7 850 7 000
下载: 导出CSV
-
[1] 石勇. 滚珠丝杠进给系统的轨迹跟踪控制方法研究[D]. 南京: 东南大学, 2018. [2] 罗茹楠, 牛文铁, 王晨升. 基于机电-刚柔耦合特性的进给系统动态误差影响因素分析[J]. 工程设计学报, 2019, 26(5): 561-569. [3] Luigi B, Califano F, Melchiorri C. Repetitive control meets continuous zero phase error tracking controller for precise tracking of B-spline trajectories[J]. IEEE Transactions on Industrial Electronics, 2020, 67(9): 7808-7818. doi: 10.1109/TIE.2019.2924861 [4] 李剑, 汤文成. 基于H∞理论的滚珠丝杠进给系统滑模控制[J]. 浙江大学学报: 工学版, 2020, 54(8): 1497-1504, 1524. [5] 刘碧茜. 滚珠丝杠进给系统神经网络自适应控制方法研究[D]. 南京: 东南大学, 2018. [6] 韩硕, 汤文成, 包达飞. 基于变幂次趋近律的滚珠丝杠进给系统滑模控制[J]. 东南大学学报:自然科学版, 2019, 49(2): 237-244. [7] 苏芳, 罗茹楠, 刘艳明, 等. 双轴联动进给系统多目标优化设计与研究[J]. 工程设计学报, 2020, 27(4): 456-462. [8] 苏芳, 王晨升, 郭刚, 等. 计及惯量比变化的直线进给系统动态误差分析[J]. 机械科学与技术, 2020, 39(12): 1882-1888. [9] 智淑亚, 吴洪兵. 数控进给伺服系统摩擦补偿控制仿真[J]. 沈阳工业大学学报, 2019, 41(4): 361-365. doi: 10.7688/j.issn.1000-1646.2019.04.01 [10] 蔡钊勇, 刘成颖. 直线电机驱动进给系统摩擦力补偿研究[J]. 组合机床与自动化加工技术, 2016(1): 52-54,62. [11] 陈勇将, 汤文成, 郭魂, 等. 基于虚拟材料的滚珠丝杠进给系统建模及其时变特性研究[J]. 制造技术与机床, 2021(1): 43-47. doi: 10.19287/j.cnki.1005-2402.2021.01.006 [12] 苏芳, 王晨升, 贾进生. 重型直线进给系统动态特性研究[J]. 制造技术与机床, 2019(7): 48-51,55. [13] Meng Y, Manzie C, Good M, et al. A review of industrial tracking control algorithms[J]. Control Engineering Practice, 2020, 102: 04536. [14] 赵万华, 张俊, 刘辉, 等. 数控机床精度评价新方法[J]. 中国工程科学, 2013, 15(1): 93-98. -

 下载:
下载:


 点击查看大图
点击查看大图
图(5) / 表(2)
计量
- 文章访问数: 75
- HTML全文浏览量: 14
- PDF下载量: 36
- 被引次数: 0


