

Spur gear pitch deviation detection based on machine vision
-
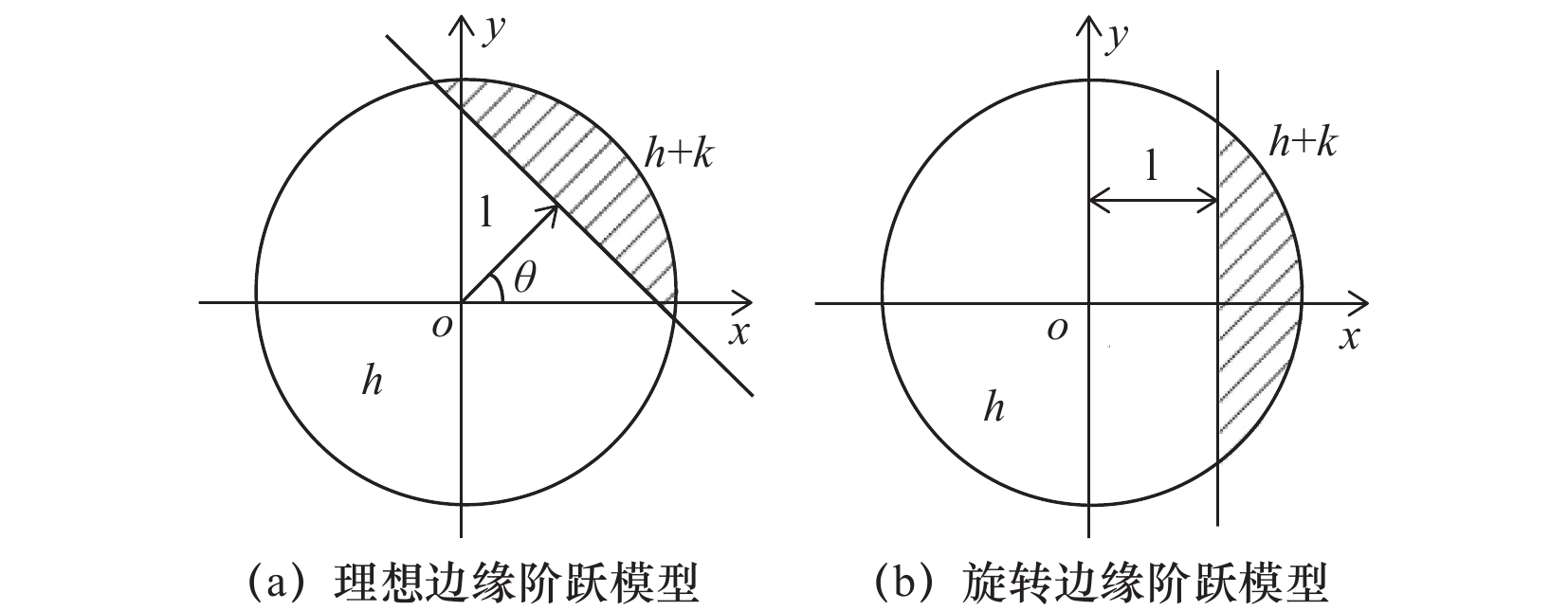
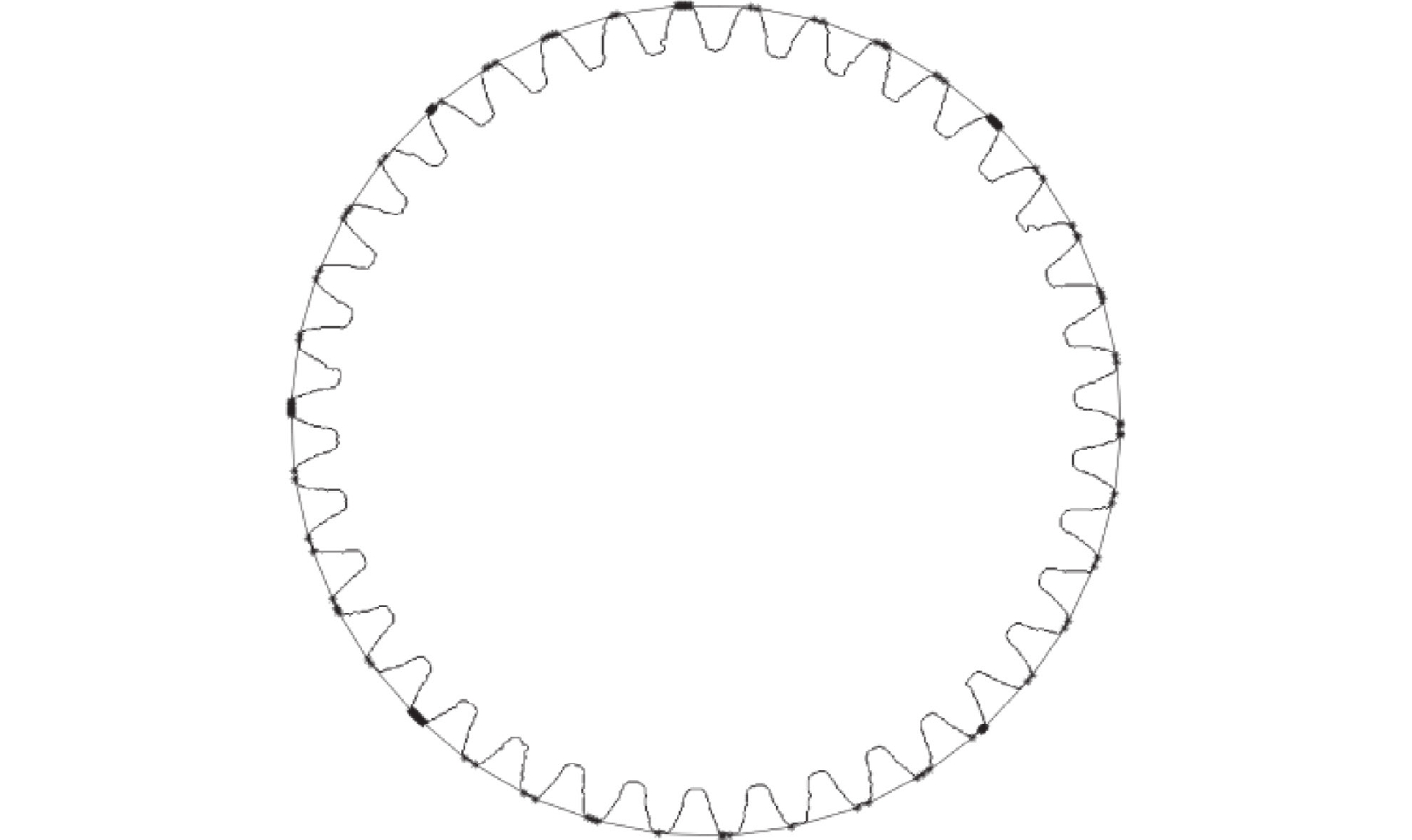
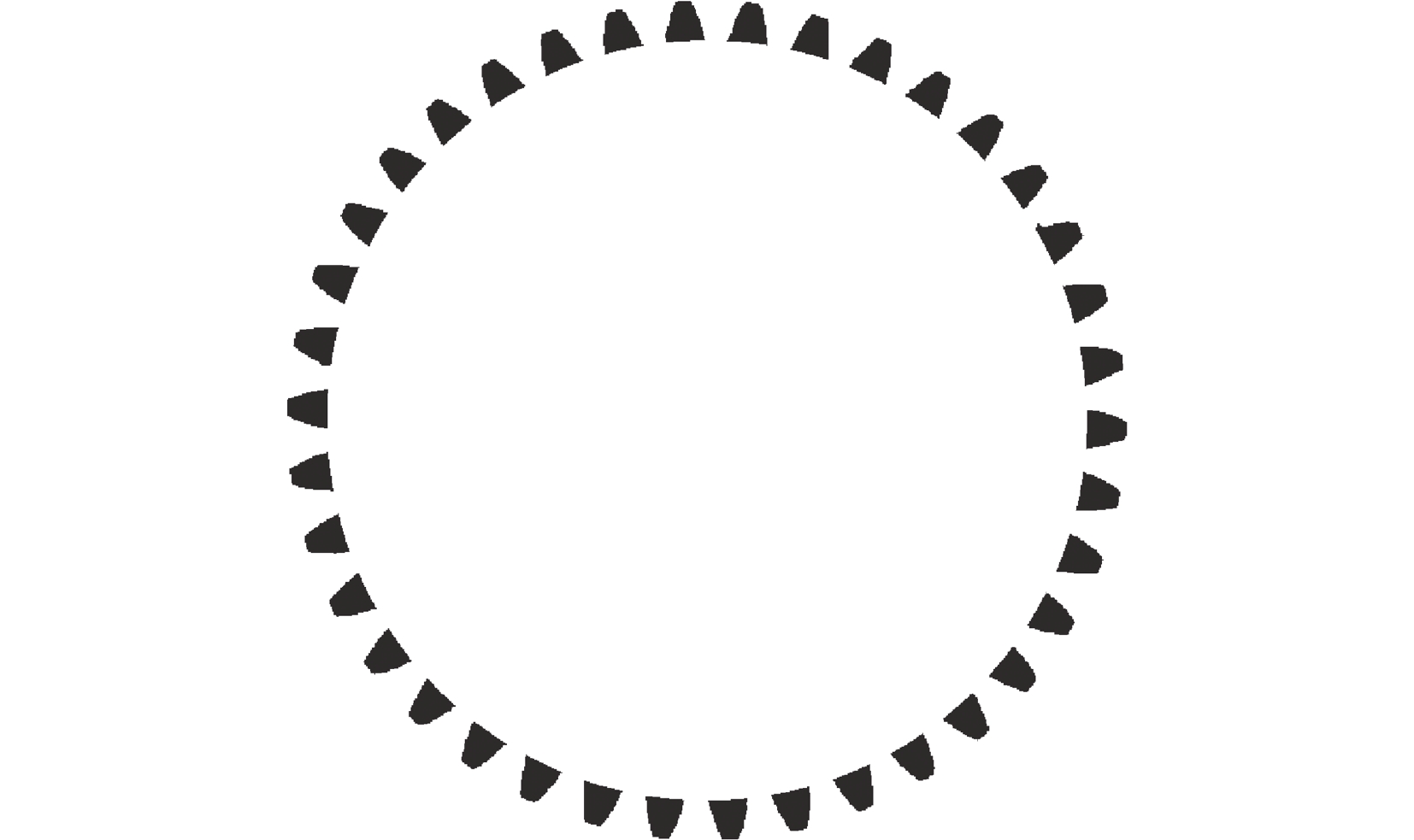
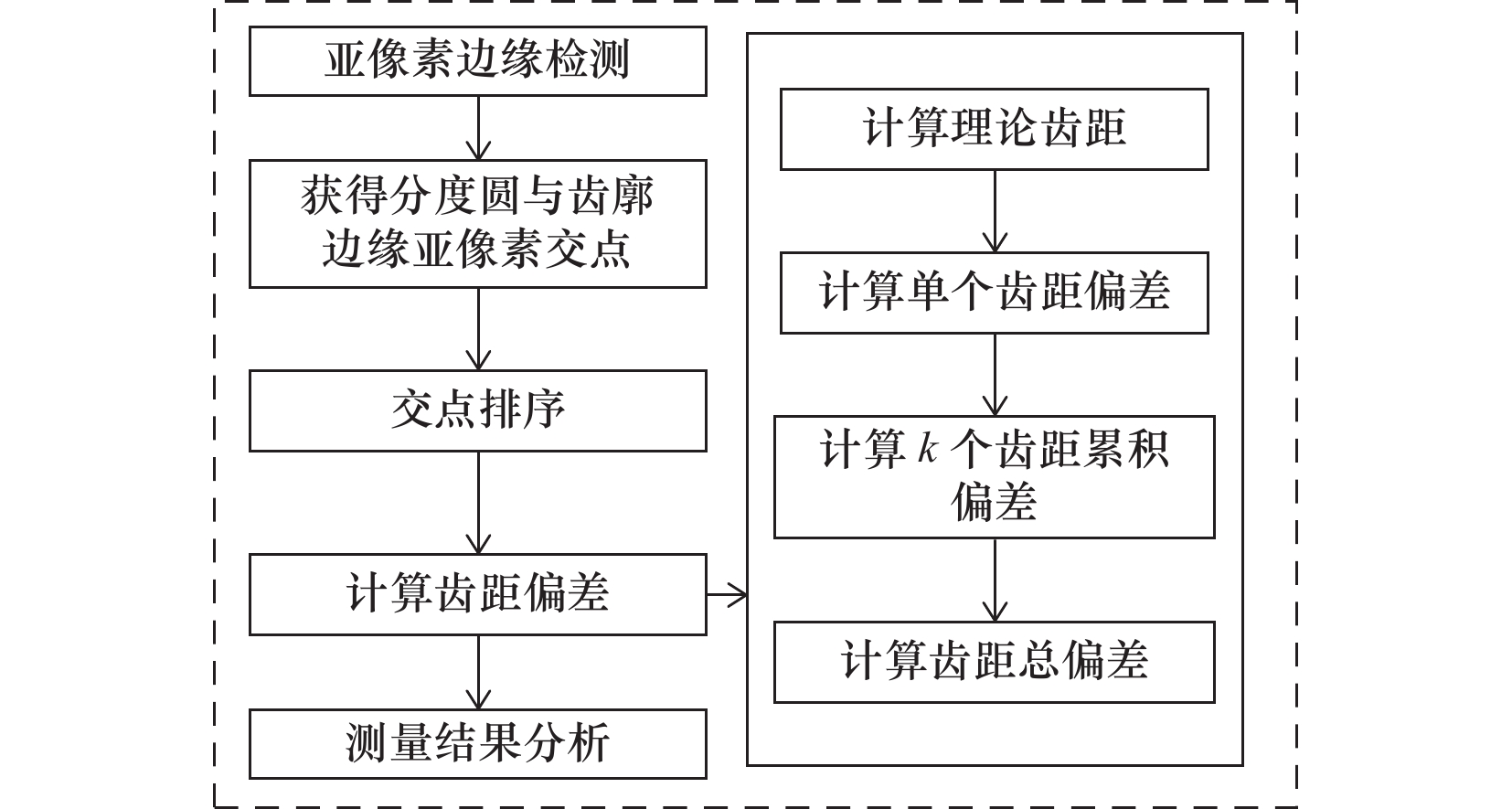
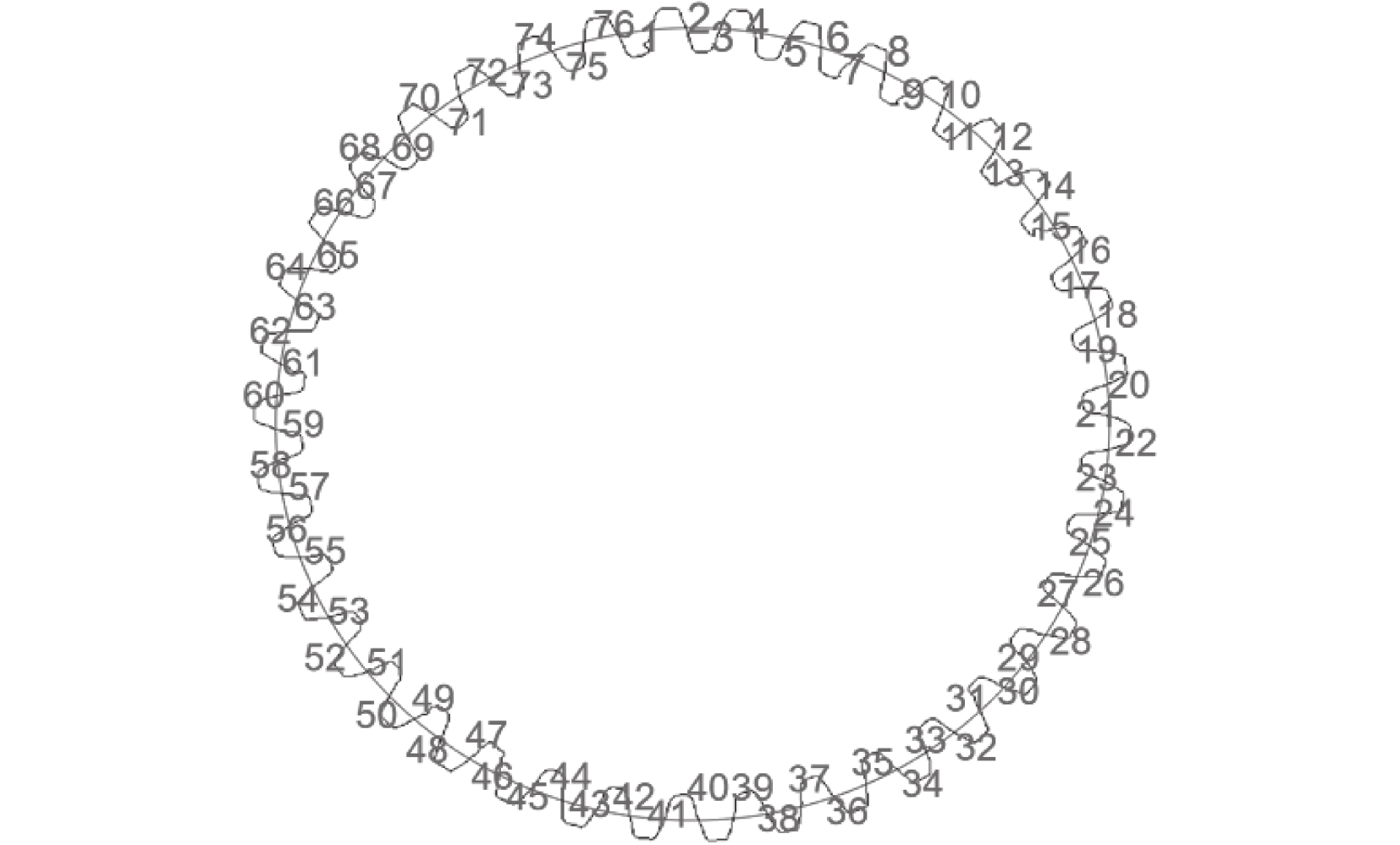
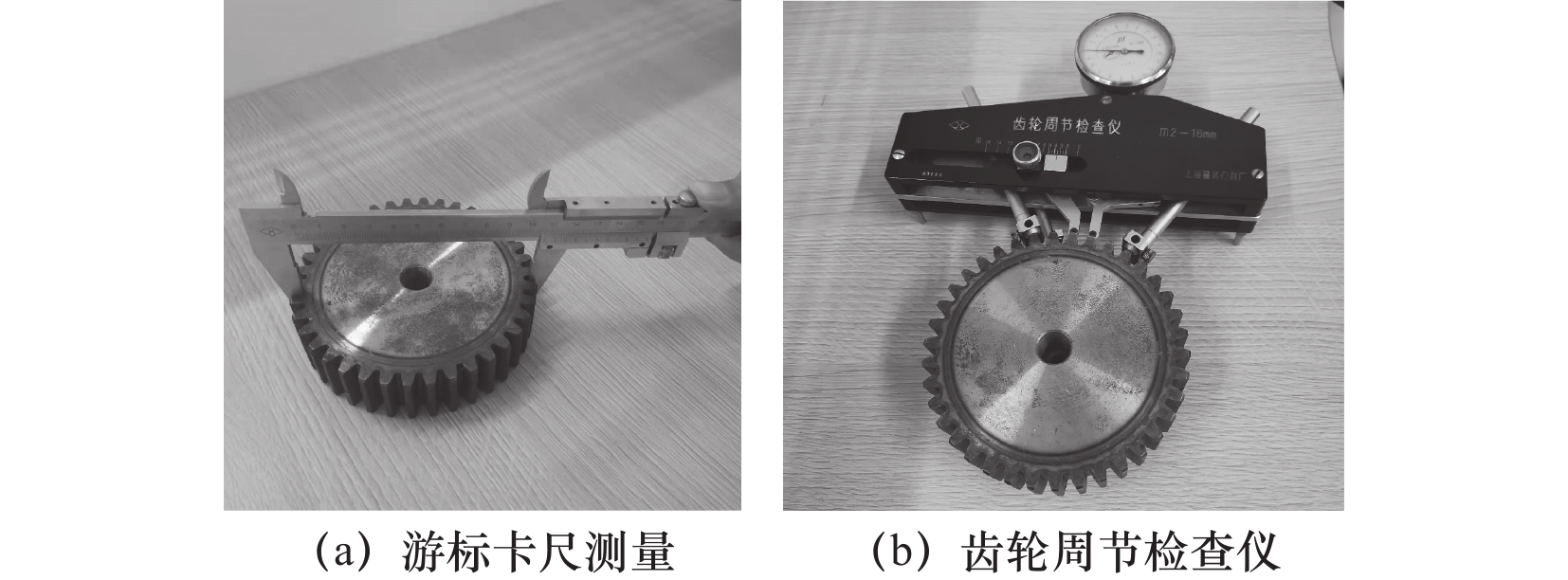
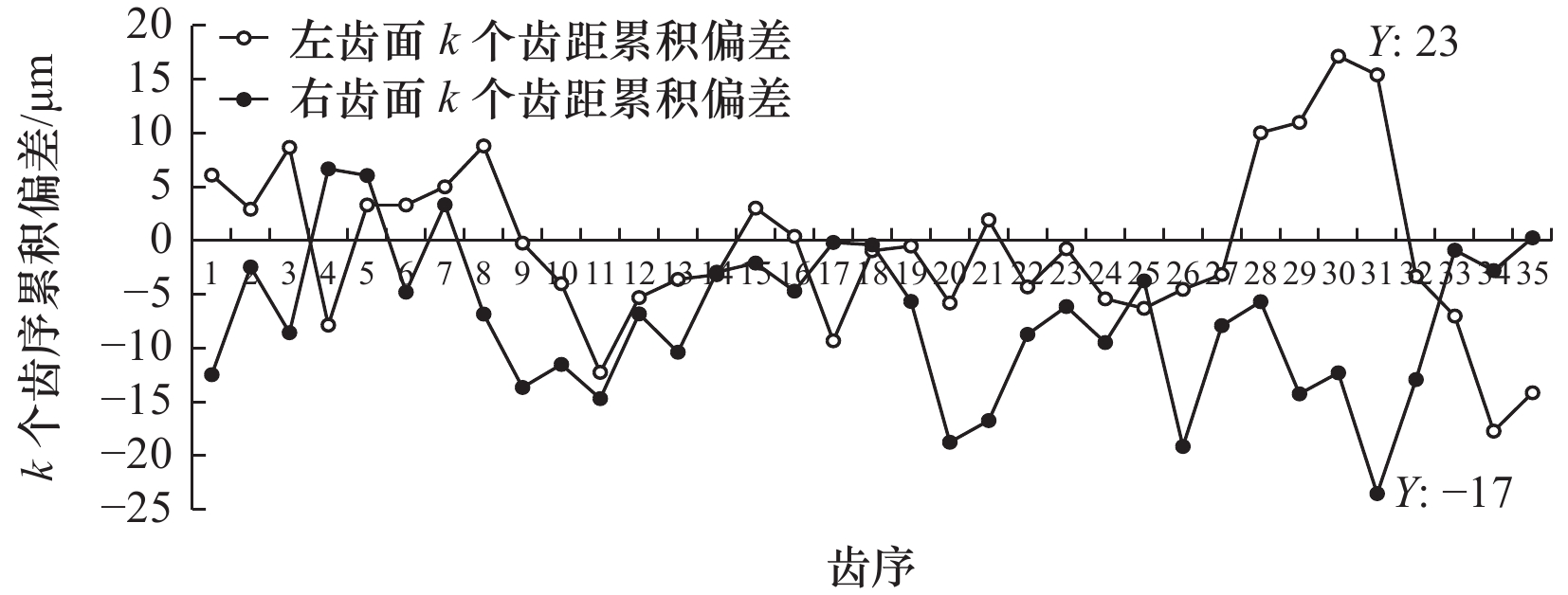
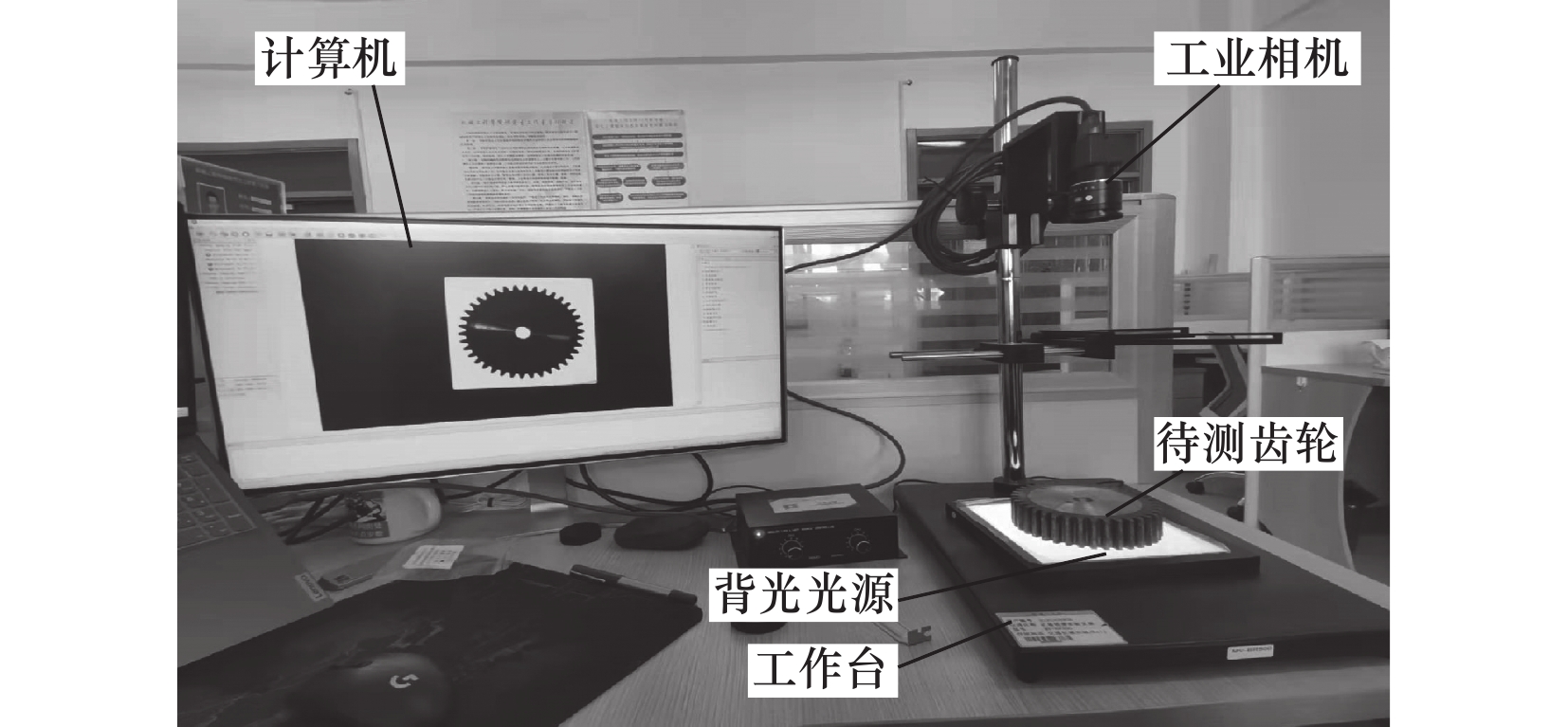
摘要: 针对直齿轮齿距偏差测量难度大、测量精度低的现状,文章采用机器视觉技术对直齿轮的齿距偏差进行检测。通过机器视觉系统获取齿轮图像,利用改进的 Zernike 矩亚像素边缘检测算法进行齿轮边缘检测;利用重心法求取齿轮几何中心,利用统计连通域法求取齿数,利用凸包法计算齿顶圆半径并计算获取齿根圆半径,通过齿顶圆公式计算模数,通过分度圆公式计算分度圆半径;依据测量结果给出了齿轮齿距偏差的测量方法,通过测量结果与直齿轮实际尺寸对比和分析,证明了该算法的合理性,可以实现齿距偏差的有效检测。Abstract: Aiming at the current situation of high difficulty and low accuracy in measuring the spur gear pitch deviation, this paper detects the spur gear pitch deviation based on machine vision technology. The gear image is acquired by the machine vision system, and the improved Zernike moment sub-pixel edge detection algorithm is used to detect the gear edge; The geometric center of the gear is obtained by the center of gravity method, the number of teeth is obtained by the statistical connected region method, the radius of the tooth crest circle is calculated by the convex hull method, and the radius of the tooth root circle is calculated. The modulus is calculated by the formula of the tooth crest circle, and the radius of the indexing circle is calculated by the formula of the indexing circle; According to the measurement results, the measurement method of gear pitch deviation is given. Through the comparison and analysis between the measurement results and the actual size of spur gears, the rationality of the algorithm in this paper is proved, and the effective detection of gear pitch deviation can be realized.
-
Key words:
- spur gear /
- machine vision /
- subpixel edge /
- pitch deviation
-
表 1 实际尺寸与测量尺寸结果
齿轮参数 测量方法 本文方法 人工测量 标准值 齿数z 38 38 38 齿顶圆半径/mm 60.009 737 59.450 60 齿根圆半径/mm 53.148 825 53.595 53.25  下载: 导出CSV
下载: 导出CSV
表 2 任意单个齿距偏差测量结果
μm 齿序 左齿面
齿距偏差右齿面
齿距偏差齿序 左齿面
齿距偏差右齿面
齿距偏差1 1.14 −4.81 20 −4.11 −0.81 2 −2.58 2.77 21 1.87 2.59 3 6.91 −6.94 22 −0.91 −6.94 4 0.64 4.53 23 −2.64 −5.57 5 −2.03 5.20 24 3.61 1.20 6 3.17 −3.34 25 −4.35 10.6 7 −9.61 8.29 26 2.64 −4.35 8 11.8 1 3.91 27 −7.29 −8.91 9 −2.03 −5.64 28 2.73 6.94 10 4.85 4.79 29 −2.59 −4.79 11 −5.81 −1.88 30 4.01 6.88 12 2.77 −2.91 31 5.89 −6.68 13 −6.94 −4.64 32 3.70 −1.64 14 −7.53 −2.52 33 −0.57 −2.83 15 5.28 10.14 34 6.28 −4.35 16 5.60 −5.34 35 −1.79 9.64 17 −6.50 2.81 36 −5.71 4.68 18 −1.34 −1.68 37 −7.13 −4.73 19 2.66 7.53 38 5.85 −1.31
下载: 导出CSV
-
[1] 赵韩, 吴其林, 黄康, 等. 国内齿轮研究现状及问题研究[J]. 机械工程学报, 2013, 49(19): 11-20. [2] 石照耀, 张万年, 林家春. 小模数齿轮测量: 现状与趋势[J]. 北京工业大学学报, 2008(2): 113-119. doi: 10.11936/bjutxb2008020113 [3] Du H G, Jin W Y, Zhang X, et al. A method of dimension measurement for spur gear based on machine vision[C]. 2011 International Conference on Multimedia and Signal Processing. IEEE, 2011, 1: 243-246. [4] 冯刚, 谢华锟, 丁华, 等. 微小齿轮测量技术的现状与发展[J]. 工具技术, 2007(4): 3-6. doi: 10.3969/j.issn.1000-7008.2007.04.001 [5] 王文成. 基于机器视觉的齿轮参数测量系统设计[J]. 机械传动, 2011, 35(2): 41-43. doi: 10.3969/j.issn.1004-2539.2011.02.012 [6] Gadelmawla E S. Computer vision algorithms for measurement and inspection of spur gears[J]. Measurement, 2011, 44(9): 1669-1678. doi: 10.1016/j.measurement.2011.06.023 [7] 郭忠峰, 杨子豪, 王赫莹. 基于MATLAB图像处理的直齿圆柱齿轮参数测量[J]. 机床与液压, 2020, 48(15): 122-126,132. doi: 10.3969/j.issn.1001-3881.2020.15.026 [8] 杨浩, 裴蕾, 李昌顺. 基于Zernike矩亚像素边缘检测, 的快速算法[J]. 计算机应用研究, 2011(11): 4380-4382. doi: 10.3969/j.issn.1001-3695.2011.11.103 [9] 高世一, 赵明扬, 张雷, 等. 基于Zernike正交矩的图像亚像素边缘检测算法改进[J]. 自动化学报, 2008(9): 1163-1168. [10] 吴一全, 邹宇, 刘忠林. 基于Franklin矩的亚像素级图像边缘检测算法[J]. 仪器仪表学报, 2019, 40(5): 221-229. [11] 李福建, 张元培. 机器视觉系统组成研究[J]. 自动化博览, 2004(2): 62-64. doi: 10.3969/j.issn.1003-0492.2004.02.024 [12] 傅思勇, 吴禄慎, 陈华伟, 等. 综合多畸变因素的摄像机标定[J]. 仪器仪表学报, 2018, 39(2): 248-256. doi: 10.19650/j.cnki.cjsi.j1702856 [13] 刘艳, 李腾飞. 对张正友相机标定法的改进研究[J]. 光学技术, 2014, 40(6): 565-570. [14] Wang Z H, Song Q F, Liu H M, et al. Absence importance and its application to feature detection and matching[J]. International Journal of Automation and Computing, 2016, 13(5): 480-490. doi: 10.1007/s11633-015-0925-7 [15] 王磊, 段会川. Otsu方法在多阈值图像分割中的应用[J]. 计算机工程与设计, 2008(11): 2844-2845, 2972. -

 下载:
下载:



 点击查看大图
点击查看大图
图(11) / 表(2)
计量
- 文章访问数: 118
- HTML全文浏览量: 67
- PDF下载量: 57
- 被引次数: 0


