

Base on RPR/RP+2R+P robot design for machining aluminum alloy structural parts
-
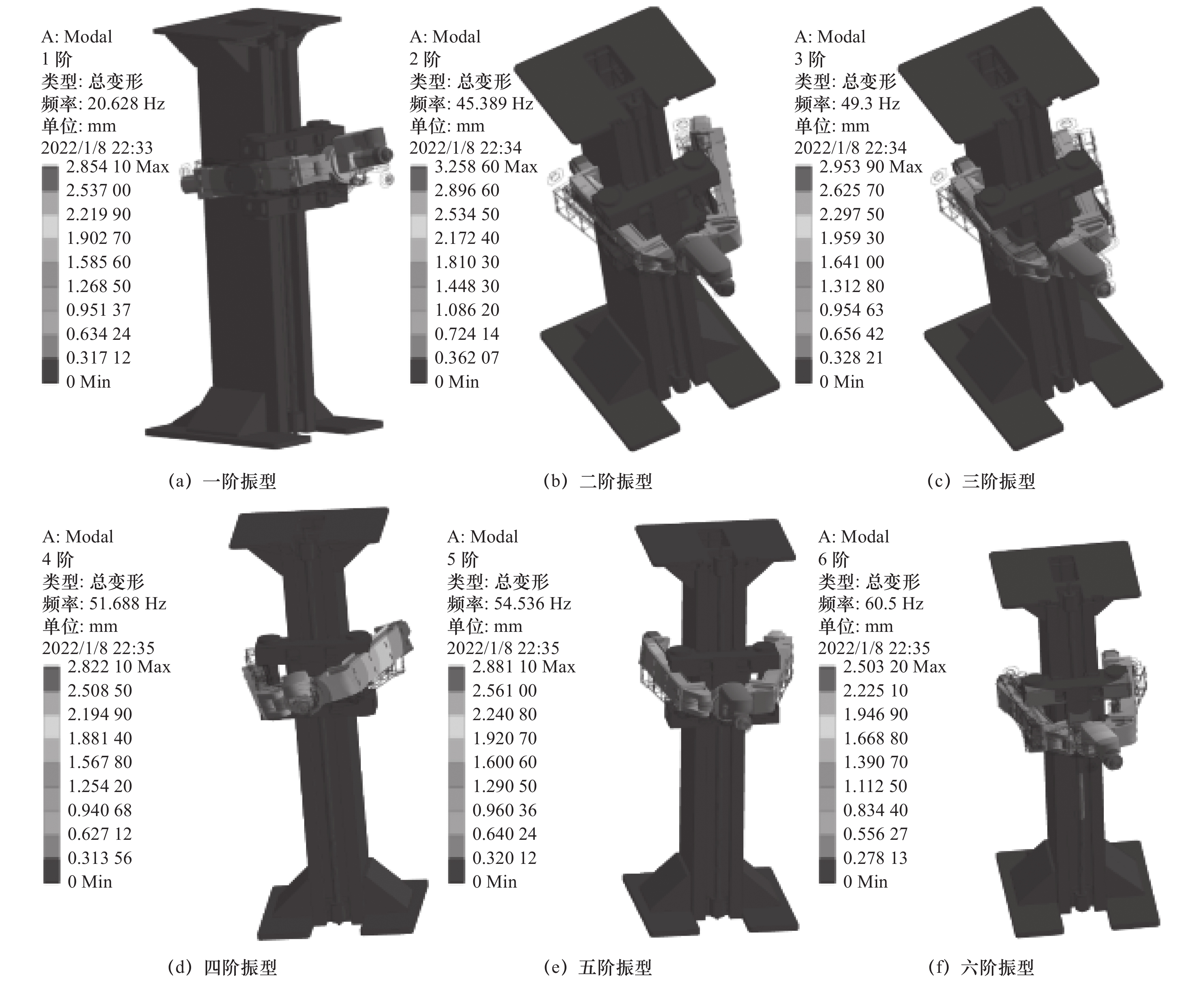
摘要: 新能源汽车是我国应对节能减排挑战的需要,发展前景巨大。针对新能源汽车车身主要采用铝合金材料,要求加工机床灵巧轻便,整体刚度适中,能够实现复杂曲面的精准成形等需求,提出一种基于RPR/RP平面并联的五自由度混联机器人构型。首先,建立RPR/RP+2R+P五自由度混联机器人基本构型,分析计算混联机器人的自由度,完成五自由度混联机器人的初始样机结构设计。其次,求解并联与混联构型位置的正反解以及速度雅可比。然后,求解五自由度混联机器人的位姿空间;以分支杆驱动力为优化指标,工作空间内机构运转不干涉为约束条件,采用Adams-Matlab联合仿真定量分析各结构参数对分支驱动力的影响,以线性回归算法进行数据拟合,完成初始样机的尺度优化。最后,以混联机器人整机及其关键构件的刚度为优化指标,采用有限元分析的探究方法对五自由度混联机器人初代样机实现递进式的结构调整,对整机进行模态分析以得到机器人振动特性。在满足刚度要求的前提下,采取少分支构型降低制造成本,加工过程可视,为针对轻薄结构件加工的混联机器人设计提供了新思路。Abstract: New energy vehicles are the needs of China to cope with the challenges of energy conservation and emission reduction, and have great development prospects. Aiming at the problem that aluminum alloy is mainly used in the body of new energy vehicles, which requires that the machine tool is dexterous and lightweight, the overall stiffness is moderate, and the precision forming of complex surfaces is realized, a five degree of freedom hybrid robot configuration based on RPR/RP plane parallel is proposed. Firstly, the basic configuration of RPR/RP+2R+P 5-DOF hybrid robot is established, the degree of freedom of the hybrid robot is analyzed and calculated, and the initial prototype structure design of the 5-DOF hybrid robot is completed. Secondly, the forward and inverse solutions of parallel and hybrid configuration positions and velocity Jacobian are solved. Then, the pose space of the 5-DOF hybrid robot is solved ; taking the driving force of the branch rod as the optimization index, and the non-interference of the mechanism operation in the working space as the constraint condition, Adams-Matlab co-simulation was used to quantitatively analyze the influence of various structural parameters on the driving force of the branch, and the linear regression algorithm was used for data fitting to complete the scale optimization of the initial prototype. Finally, taking the stiffness of the hybrid robot and its key components as the optimization index, the finite element analysis method is used to realize the progressive structural adjustment of the initial prototype of the 5-DOF hybrid robot. The modal analysis of the whole machine is carried out to obtain the first six-order vibration characteristics of the robot. Under the premise of meeting the stiffness requirements, the new five-degree-of-freedom hybrid robot for aluminum alloy structural parts processing is beneficial to reduce the manufacturing cost and better realize the visualization of machining process. It provides a new idea for the design of hybrid robot for light and thin structural parts processing.
-
Key words:
- aluminum parts machining /
- hybrid machine tool /
- scale optimization /
- virtual simulation
-
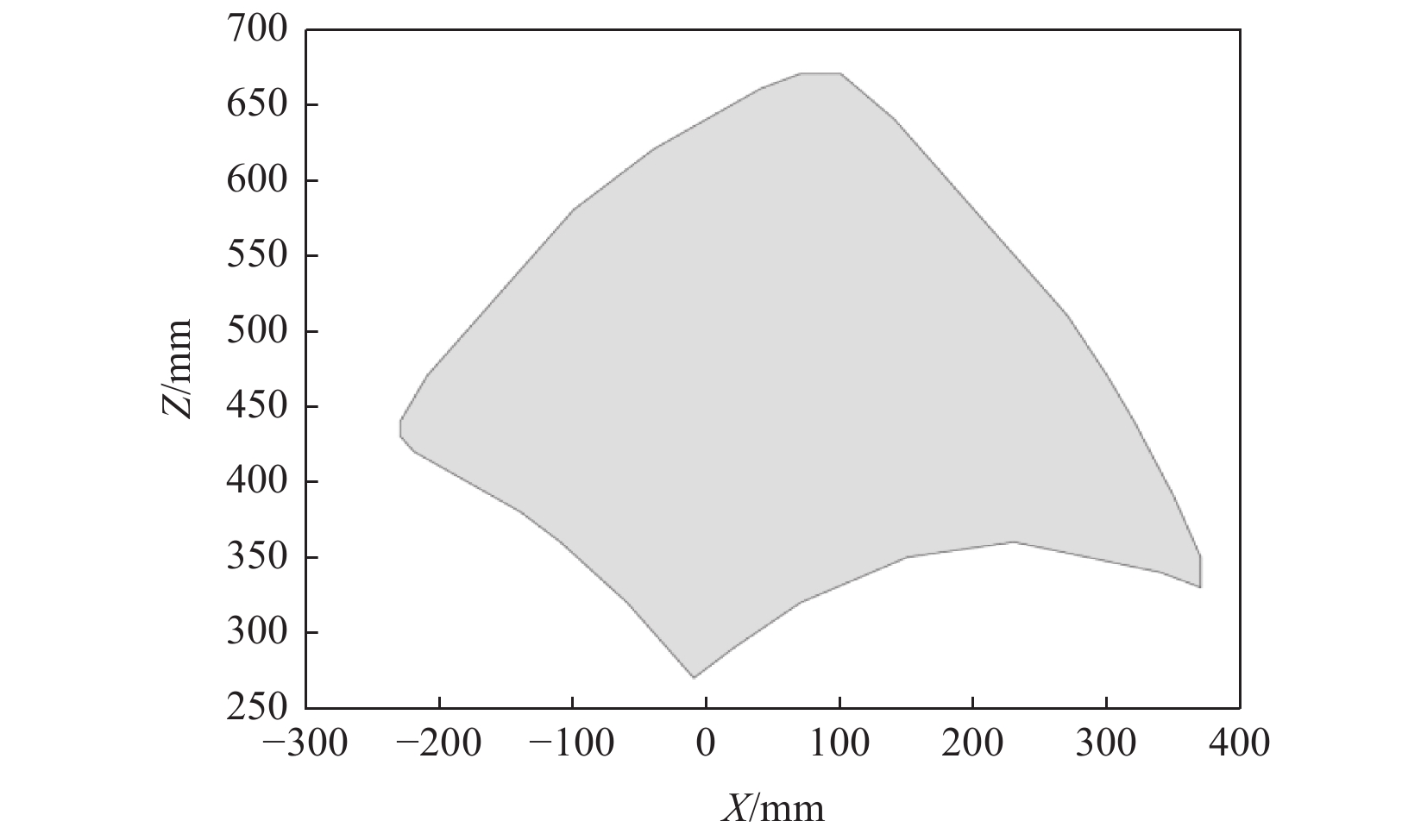
表 1 混联机器人设计指标
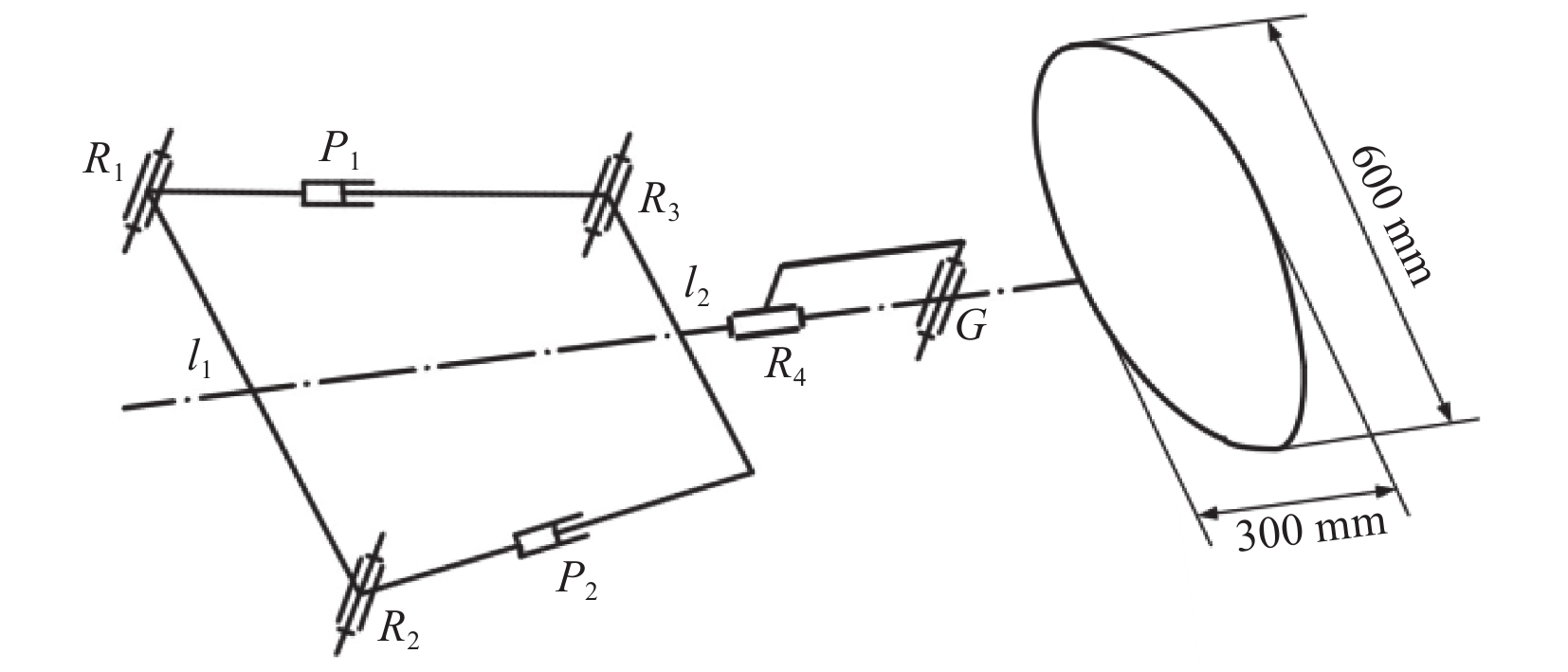
设计参数 设计要求 工作空间/(mm×mm) 600 ×300 的椭圆形区域 分支最大速度/(m/min) 30 上下移动轴最大速度/(m/min) 50 空间定位精度/mm ≤0.05 重复定位精度/mm ≤0.02 主轴功率/kW 12~18  下载: 导出CSV
下载: 导出CSV
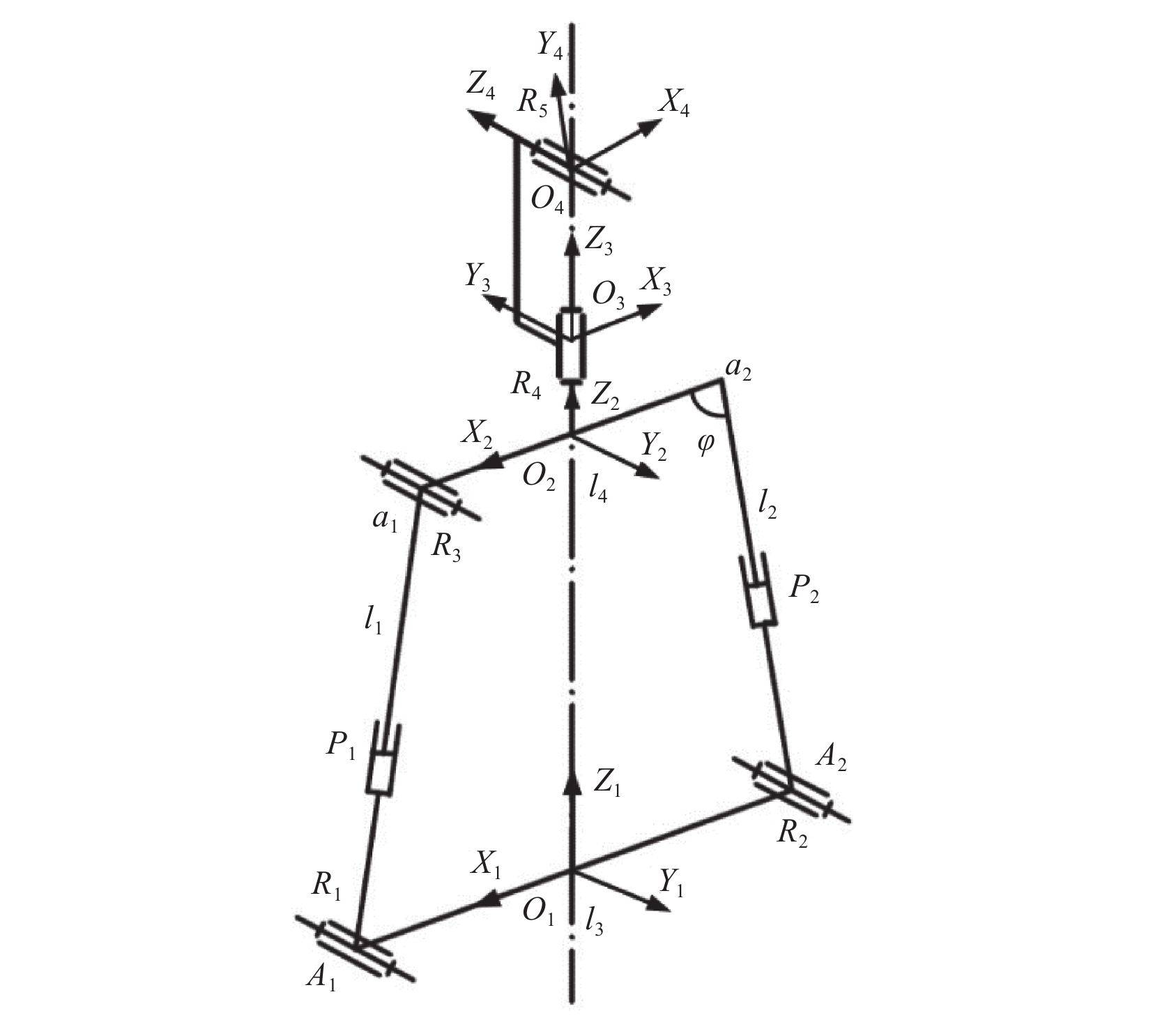
表 2 D-H参数表
连杆i 连杆扭角
$\alpha _\left( {i - 1} \right)$连杆长度
$a_\left( {i - 1} \right)$关节偏置
距离${d_i}$关节转角${\theta _i}$ 1 0 0 0 ${\theta _1}$ 2 90 0 $0$ ${\theta _2}$ 3 −90 0 $d$ 0
下载: 导出CSV
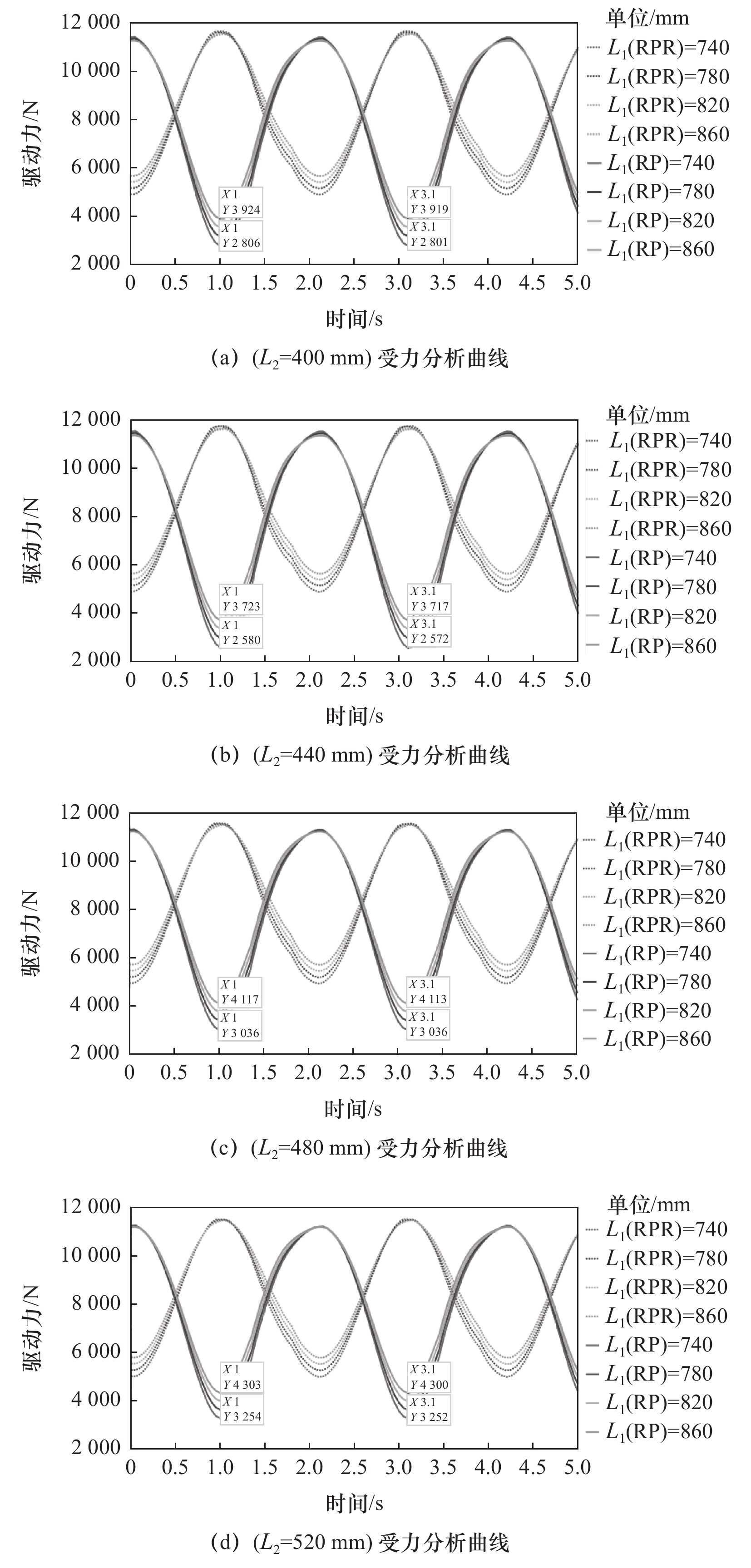
表 3 混联机构结构参数表
组数 L1 L2 组数 L1 L2 1 740 400 9 820 400 2 740 440 10 820 440 3 740 480 11 820 480 4 740 520 12 820 520 5 780 400 13 860 400 6 780 440 14 860 440 7 780 480 15 860 480 8 780 520 16 860 520
下载: 导出CSV
-
[1] 解洪权. 新能源汽车高强韧铝合金结构件轻量化关键技术开发与产业化[C]. 2020重庆市铸造年会论文集. 重庆铸造行业协会、重庆市机械工程学会铸造分会, 2020: 6–11. [2] 林明松. 新能源汽车铝合金材料工艺及应用−评一线技术专家倾力编写的《新能源汽车铝合金材料工艺及应用》[J]. 铸造, 2021, 70(12): 1491. doi: 10.3969/j.issn.1001-4977.2021.12.029 [3] 杨应洪, 尹显明. 一种3自由度并联机床的性能分析[J]. 机械设计与制造, 2019(10): 134-139. doi: 10.3969/j.issn.1001-3997.2019.10.034 [4] 党鹏飞. 并联机床运动精度及参数辨识方法研究[D/OL]. 沈阳: 东北大学, 2015[2022–05–29]. [5] 周鑫, 许允斗, 姚建涛, 等. 5-ups/prpu冗余驱动并联机床完整刚度模型及其刚度特性[J]. 光学精密工程, 2015, 23(4): 1070-1080. [6] 邵旭光. 面向混联机床的故障检测方法与精度容错技术研究[D/OL]. 成都: 电子科技大学, 2010. [7] Xu L, Chen Q, He L, 等. Kinematic analysis and design of a novel 3t1r 2-(prr)(2) rh hybrid manipulator[J]. Mechanism and Machine Theory, 2017, 112: 105-122. [8] 董成林. 一种新型五自由度混联机器人的参数化建模与集成设计方法研究[D]. 天津: 天津大学, 2020. [9] Wang Y Y , Huang T , Zhao X M , et al. Finite element analysis and comparison of two hybrid robots-the tricept and the TriVariant[C]. Intelligent Robots and Systems, 2006 IEEE/RSJ International Conference on. IEEE, 2006, 490. [10] 李东辉. 新型可重构混联机器人Tricept-iv运动学标定方法研究[D/OL]. 天津: 天津大学, 2010[2022–05–29]. [11] Jin Y, Bi Z M, Liu H T, 等. Kinematic analysis and dimensional synthesis of exechon parallel kinematic machine for large volume machining[J]. Journal of Mechanisms and Robotics-Transactions of the Asme, 2015, 7(4): 041004. [12] 董成林, 李锦涛, 刘海涛, 等. TriMule与Exechon机器人的切向运动传递特性同性条件及运动学性能分析[J]. 机械工程学报, 2021, 57(15): 23-32. [13] 汤腾飞, 方汉良, 张俊. 类Exechon并联机构模块可重构概念设计与运动学分析[J]. 天津大学学报:自然科学与工程技术版, 2019, 52(7): 733-744. [14] Zhang J, Zhao Y Q. , Jin Y. Elastodynamic modeling and analysis for an exechon parallel kinematic machine[J]. Journal of Manufacturing Science and Engineering-Transactions of the Asme, 2016, 138(3): 031011. doi: 10.1115/1.4030938 [15] 李彬, 黄田, 刘海涛, 等. Exechon混联机器人的三自由度并联机构模块位置分析[J]. 中国机械工程, 2010, 21(23): 2785-2789. [16] 王昊杰, 薛强. 一种三坐标并联动力头−sprint z3的运动学逆解及尺度综合[J]. 机床与液压, 2011, 39(17): 53-56. doi: 10.3969/j.issn.1001-3881.2011.17.016 [17] 黄玉美, 高峰, 史文浩. 混联式数控机床的发展[J]. 制造技术与机床, 2001(8): 12-13,3. doi: 10.3969/j.issn.1005-2402.2001.08.004 [18] 李兴山, 蔡光起. 三自由度混联机床的机构误差分析与仿真[J]. 组合机床与自动化加工技术, 2011(3): 19-22. doi: 10.3969/j.issn.1001-2265.2011.03.006 [19] 高天国, 刘鹏. 新型串并联机床LINKS-exe700型加工中心结构与工作空间的分析与研究[J]. 自动化博览, 2009, 26(4): 54-57. doi: 10.3969/j.issn.1003-0492.2009.04.016 [20] 杨超, 叶伟, 张克涛, 等. 2UPR-rpu过约束并联机构刚度性能评价[J]. 农业机械学报, 2020, 51(2): 392-401. doi: 10.6041/j.issn.1000-1298.2020.02.043 [21] 潘巧. TriMule混联机器人的精度分析和综合[D/OL]. 天津: 天津大学, 2019. [22] Dong C L, Liu H T, Liu Q, et al. An approach for type synthesis of overconstrained 1t2r parallel mechanisms[C]. Computational Kinematics. Cham: Springer International Publishing Ag, 2018: 274–281. [23] 曲兴田, 赵永兵, 刘海忠, 等. 串并混联机床几何误差建模与实验[J]. 吉林大学学报:工学版, 2017, 47(1): 137-144. [24] Xu Y, Zhang D, Yao J, et al. Type synthesis of the 2r1t parallel mechanism with two continuous rotational axes and study on the principle of its motion decoupling[J]. Mechanism and Machine Theory, 2017, 108: 27-40. doi: 10.1016/j.mechmachtheory.2016.09.007 -

 下载:
下载:





 点击查看大图
点击查看大图
图(22) / 表(5)
计量
- 文章访问数: 91
- HTML全文浏览量: 13
- PDF下载量: 34
- 被引次数: 0


