

Optimization of industrial robots off-line programming for grasping tasks
-
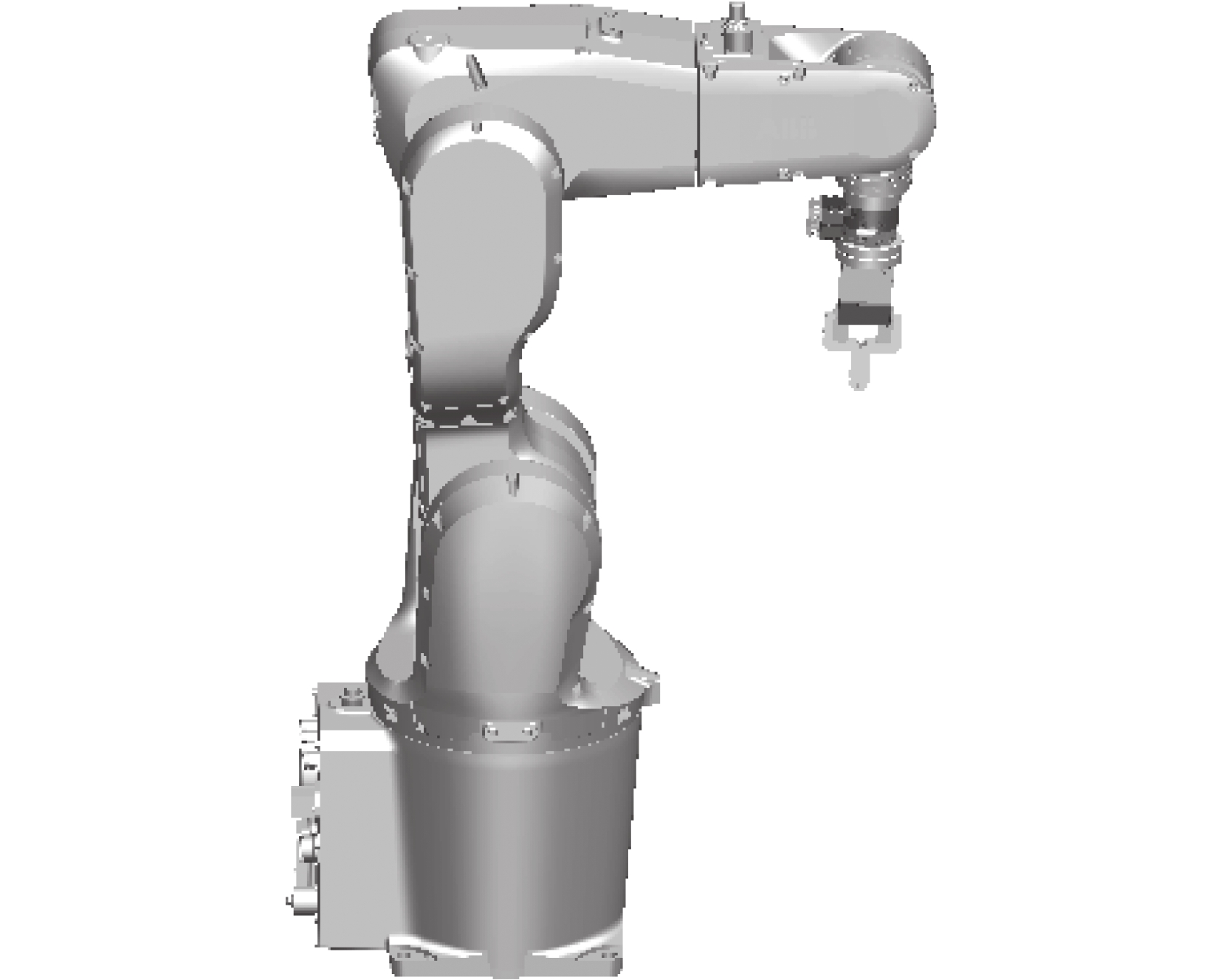
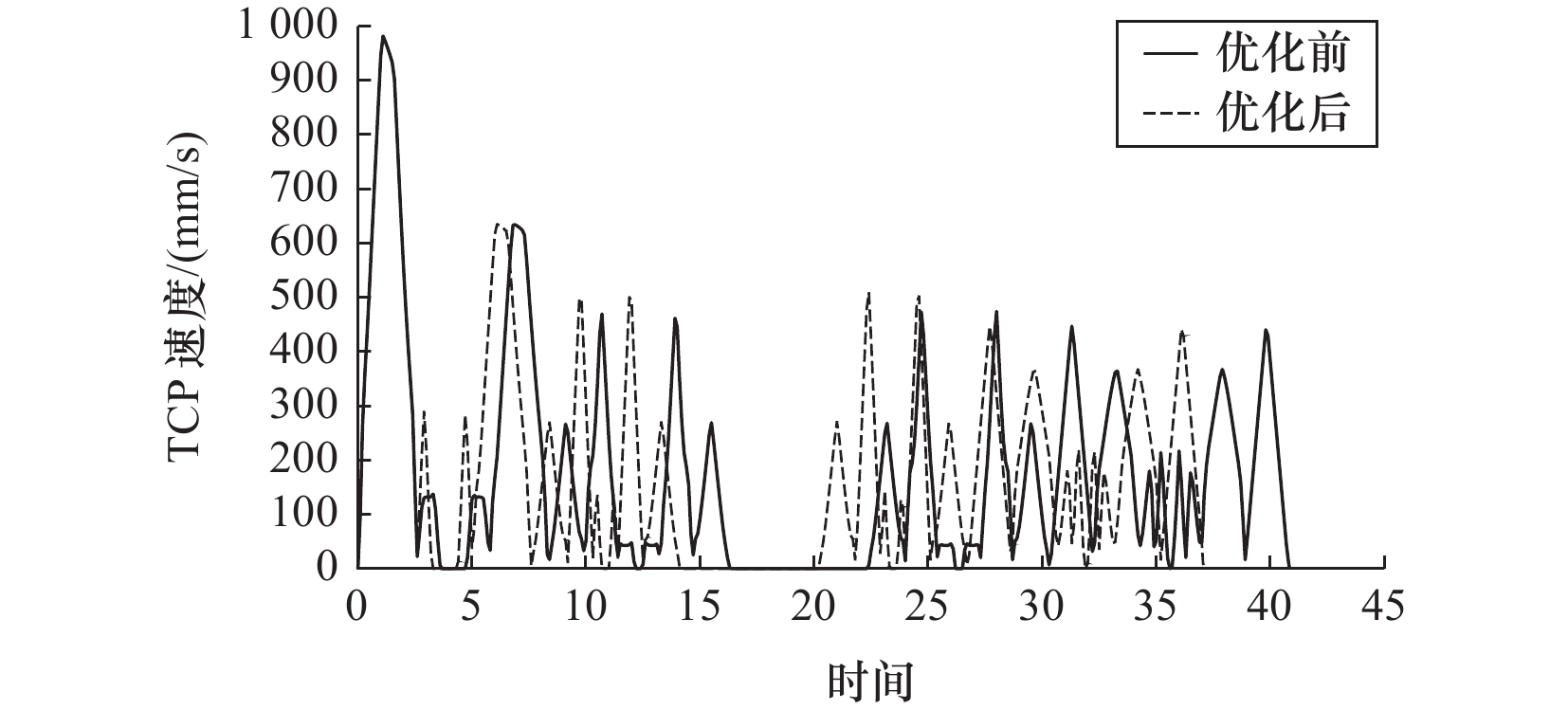
摘要: 为提高工业机器人的运行效率,降低生产成本,对工业机器人抓取过程进行离线编程优化。以IRB1200型机器人为例,首先,根据机器人正、逆运动学搭建运动学模型;其次,分析加工工艺和机器人运行轨迹;再次,在Tecnomatix环境中搭建仿真平台,分析不同运动情况下TCP速度;最后,对比机器人离线编优化前后的速度,加工时间缩短约10%。经实验验证,该优化方式可提高工业机器人运动效率,降低工作能耗。
-
关键词:
- 工业机器人 /
- 离线编程 /
- Tecnomatix /
- 位姿优化
Abstract: In order to improve the operation efficiency of the robot and reduce the production cost, the off-line programming for grasping process of the industrial robot is optimized. This Paper takes the IRB1200 robot as the research object. Firstly, the kinematics model of the robot is built by the forward and inverse kinematics. Secondly, the processing technology and the running trajectory are analyzed. Thirdly, the simulation platform is built in Tecnomatix environment to analyze the TCP speed under different motion conditions. Finally, the off-line programming of the robot before and after the speed are compared. Consequently, the processing time can be shortened by about 10%. The experiments have verified that the optimization method can improve the motion efficiency of industrial robots, and reduce the work energy consumption.-
Key words:
- industrial robot /
- off-line programming /
- Tecnomatix /
- pose optimization
-
表 1 零件加工工艺
工作工序 工作内容 机器人运行
轨迹作业准备,
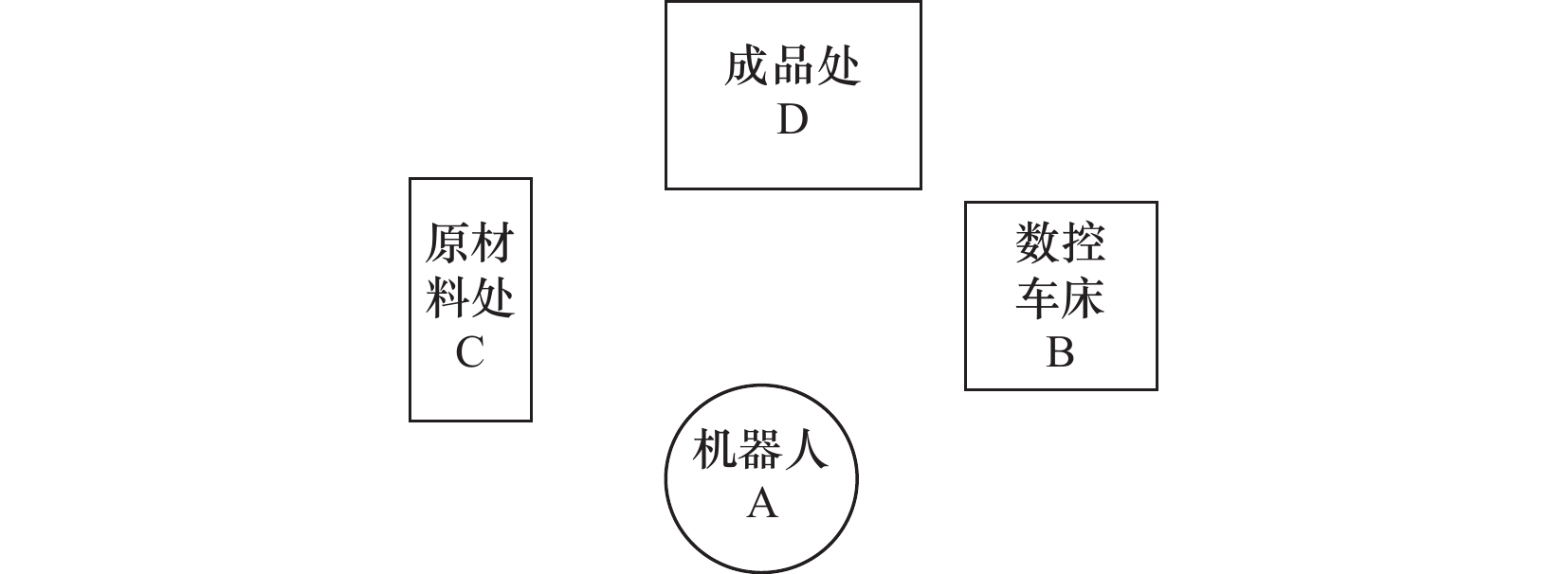
系统启动零件到位,机器人位于初始位置 A 抓取原材料 等待信号,机器人从原材料处
抓取零件A-C 等待 机器人运行至等待位,
数控车门打开C-等待位 零件放置 机器人将零件放置三爪卡盘处,
三爪卡盘夹紧等待位-B 机器人退回 机器人退回等待位,
数控车床关闭B-等待位 加工 数控车床开始工作,工作结束后
打开车床门等待位 抓取成品 机器人运行至三爪卡盘抓取成品,
三爪卡盘释放等待位-B 搬运 机器人将成品搬运到成品处,
并放置于对应位置B-D 初始位置 机器人回到初始位置,
进行下一次工作D-A  下载: 导出CSV
下载: 导出CSV
表 2 组件定义
设备 组件名称 功能 数控车床 Device 零件加工 IRB1200 Robot 物料搬运 原材料处 Device 零件存放处 成品处 Device 成品存放处 抓手 Gripper 零件抓取
下载: 导出CSV
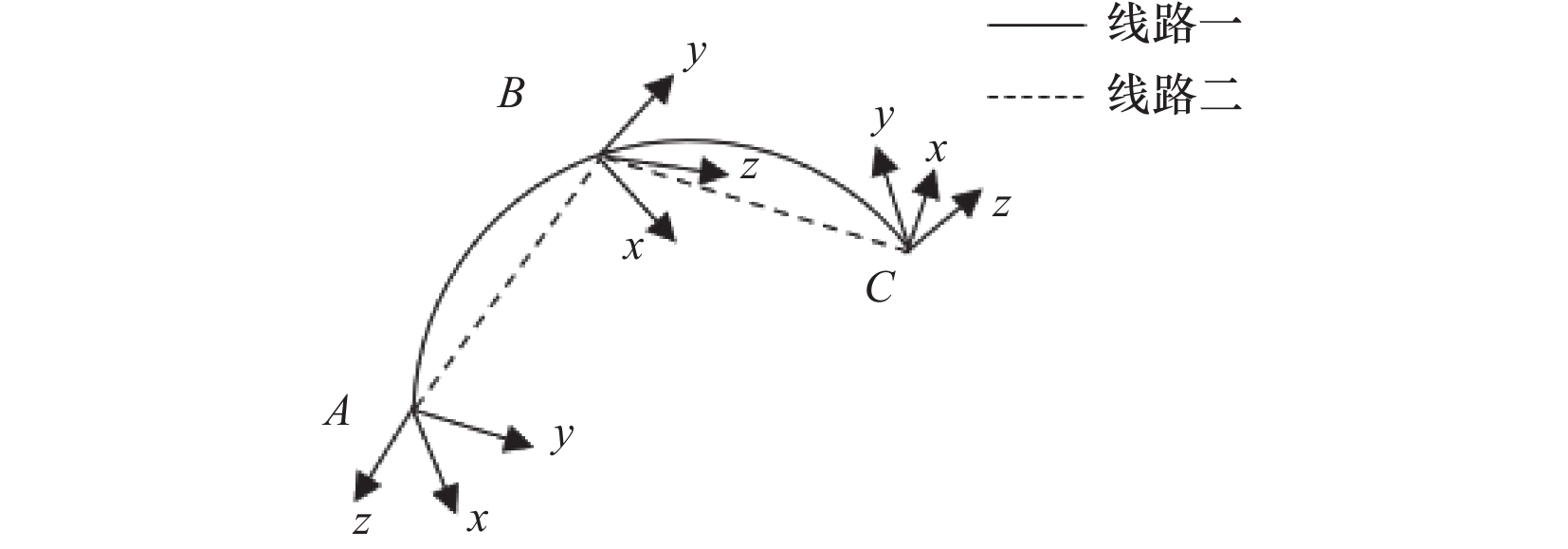
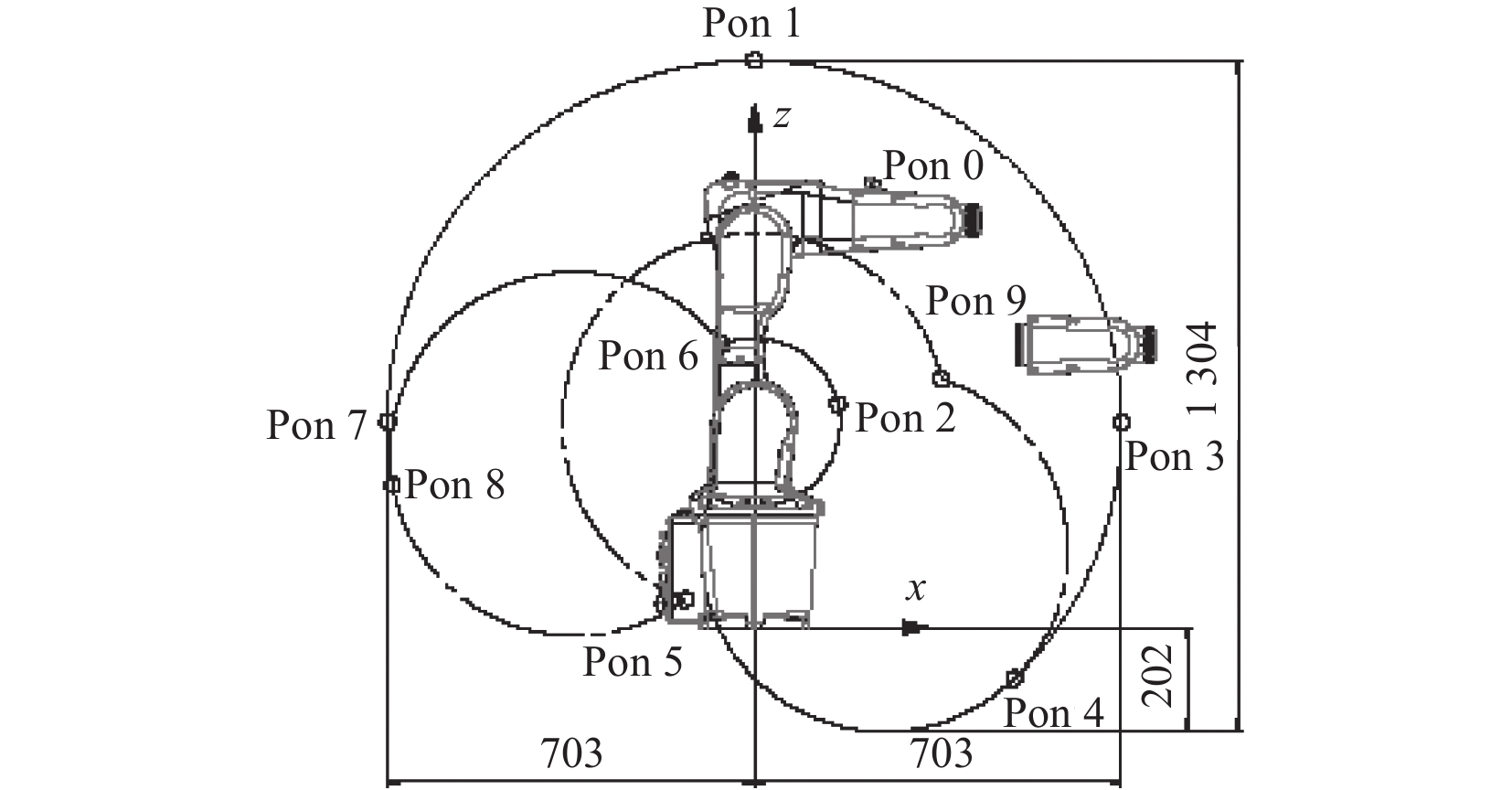
表 3 机器人轨迹点各关节角
轨迹点 关节转角/(°) $ {\theta }_{1} $ $ {\theta }_{2} $ $ {\theta }_{3} $ $ {\theta }_{4} $ $ {\theta }_{5} $ $ {\theta }_{6} $ A 0 −4.85 4.39 0 93.4 0 C 143.21 20.53 37.98 56.05 18.24 91.35 等待位 168.96 15.62 −189.3 12.01 −46.01 164.65 B −6.26 116.66 −168.9 4.89 91.02 −3.83 D −74.27 −45.64 −183.1 20.55 50.56 76.61
下载: 导出CSV
-
[1] 曹家勇, 吴沛华, 吕文壮, 等. 汽车车身多机器人焊接路径规划和Tecnomatix虚拟仿真[J]. 机械设计与研究, 2021, 37(5): 21-26. [2] Su Y P, Chen X Q, Zhou T, et al. Mixed-reality-enhanced human–robot interaction with an imitation-based mapping approach for intuitive teleoperation of a robotic arm-hand system[J]. Applied Sciences, 2022, 12(9):4740. [3] 迟明善, 姚玉峰, 刘亚欣. 基于示教编程的共融机器人技能学习方法的研究进展[J]. 仪器仪表学报, 2020, 41(1): 71-83. [4] Chi X F, Li Q Y, Yan H X, et al. Robot trajectory optimization control of braiding for three-dimensional complex preforms[J]. Journal of Engineered Fibers and Fabrics, 2021,16: doi.org/10.1177/15589250211043226. [5] 孟静静, 郝睿, 王惠卿, 等. 基于PLC与工业机器人的自动生产线智能包装系统设计[J]. 制造技术与机床, 2021(11): 63-67. [6] Dai H, Lv G, Huang W, et al. Analysis for the process planning of the body side welding in delmia[J]. Journal of Physics: Conference Series, 2022, 2198(1):012037. [7] 陈快, 杨华, 潘涛. 基于ROBOGUIDE的机器人焊接工作站的仿真设计[J]. 焊接技术, 2020, 49(10): 66-69. [8] Li L, Li X, Zhou X, et al. Study of off-line programming system of arc robot based on the software of ROBOGUIDE[M]. Berlin, Heidelberg: Springer Berlin Heidelberg, 2007: 401-408. [9] 刘峰. 基于图像边缘检测的绘画机器人轨迹规划研究[D]. 大连: 大连理工大学, 2021. [10] 李雪梅, 崔菲菲, 骆海涛, 等. 六自由度工业机器人运动学分析与仿真[J]. 制造业自动化, 2022, 44(7): 7-10. doi: 10.3969/j.issn.1009-0134.2022.07.002 [11] 陈赛旋. 协作机器人零力控制与碰撞检测技术研究[D]. 合肥: 中国科学技术大学, 2018. [12] 孟军辉, 马诺, 胡睿, 等. 具有非对称褶皱结构的自生长软体机器人设计与运动特性[J]. 兵工学报, 2022(11): 1-13. doi: 10.3969/j.issn.1000-1093.2022.02.001 [13] Ružarovský R, Skýpala R. A general take on a tecnomatix process simulate´s digital twin creation and its exchange of information with the TIA Portal and PLC SIM advanced[J]. Journal of Physics: Conference Series, 2022, 2212(1): 12010. -

 下载:
下载:


 点击查看大图
点击查看大图
图(9) / 表(3)
计量
- 文章访问数: 67
- HTML全文浏览量: 8
- PDF下载量: 35
- 被引次数: 0


