

Measurement and processing integration technology based on population algorithm
-
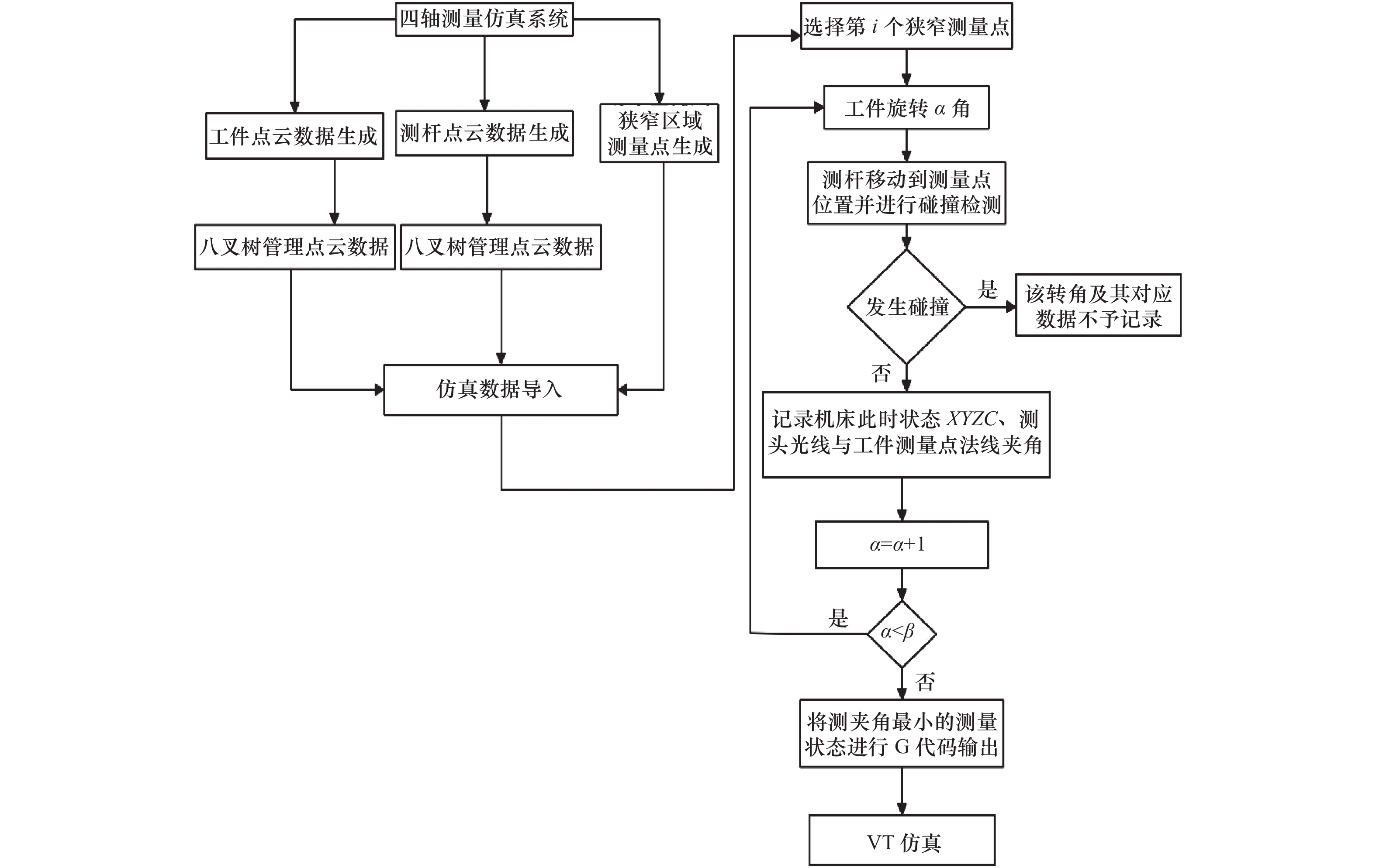
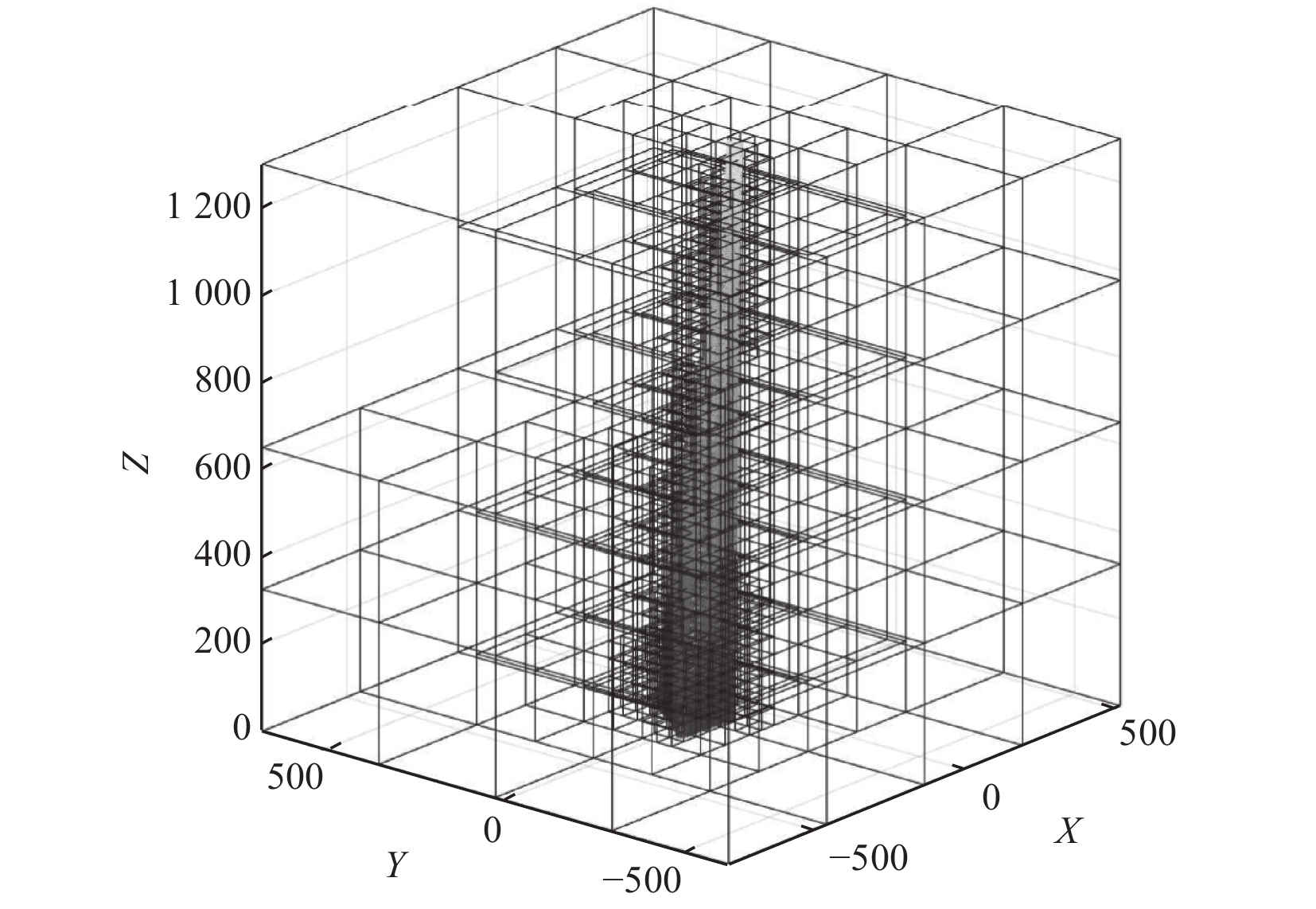
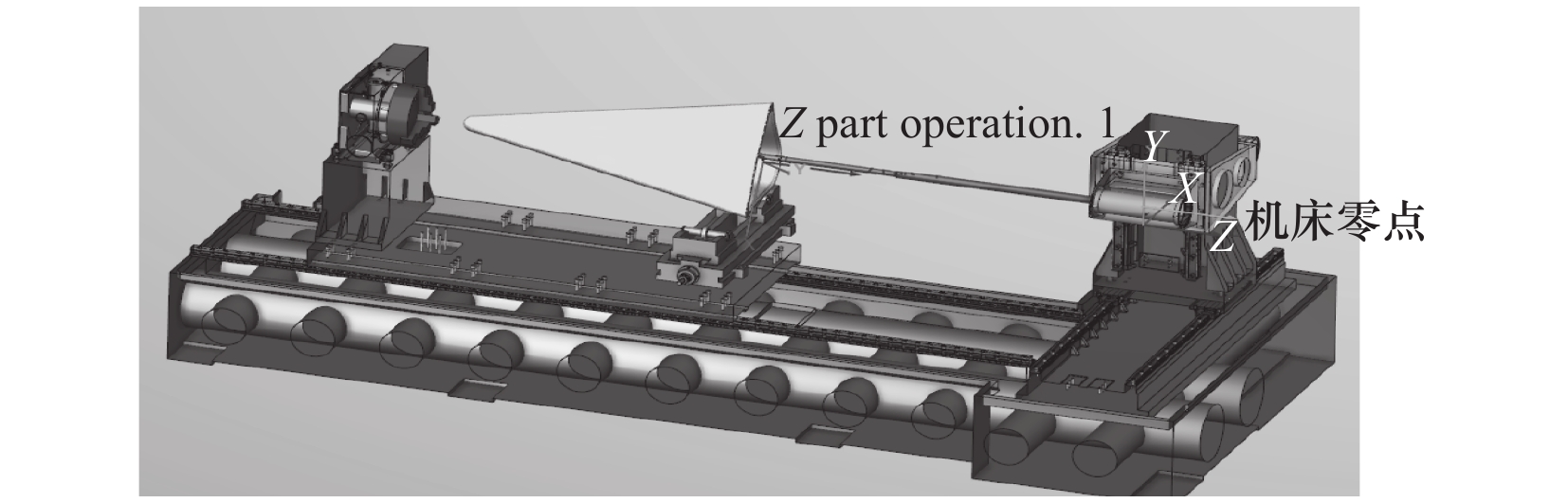
摘要: 针对异形天线罩复杂曲面的测量加工一体化加工方法中,存在测量复杂曲面时测杆与工件易发生干涉,使得数控编程困难的问题,提出了一种复杂曲面测量路径规划方法。该方法将机床测量系统离散为点云数据,通过点云的空间坐标变换来模拟数控测量时测杆与工件的位置关系,同时引入八叉树算法为点云增加拓扑关系,并检测测杆点云与工件点云之间是否发生干涉。最终将无干涉测量状态下的测量系统信息输出为G代码,通过Vericut软件进行轨迹仿真。文中对8 504个测量点进行测量路径规划,结果表明,测量路径均可以避开干涉位置进行有效地测量。该碰撞检测算法可以在满足测量要求的前提下准确地实现复杂曲面的测量路径规划,为复杂曲面的测量方法提供理论指导。Abstract: Aiming at the integrated processing method of measurement and processing of complex surfaces on special-shaped radomes, there is a problem that the measuring rod and the workpiece are prone to interference when measuring complex surfaces, which makes CNC programming difficult, and a complex surface measurement path planning method is proposed. This method discretizes the machine tool measurement system into point cloud data, simulates the position relationship between the measuring rod and the workpiece during CNC measurement through the spatial coordinate transformation of the point cloud, and introduces the octree algorithm to add topological relationship to the point cloud, and detects whether interference occurs between the measuring rod point cloud and the workpiece point cloud. Finally, the measurement system information in the non-interferometric state is output as G-code, and the trajectory simulation is carried out through Vericut software and applied to reverse engineering. In this paper, 8 504 measurement points are planned for measurement paths, and the results show that the measurement paths can avoid interference positions and make effective measurements. The collision detection algorithm can accurately realize the measurement path planning of complex surfaces under the premise of meeting the measurement requirements, and provide theoretical guidance for the measurement methods of complex surfaces.
-
Key words:
- octree /
- measurement and processing integration /
- complex surfaces /
- measure the path
-
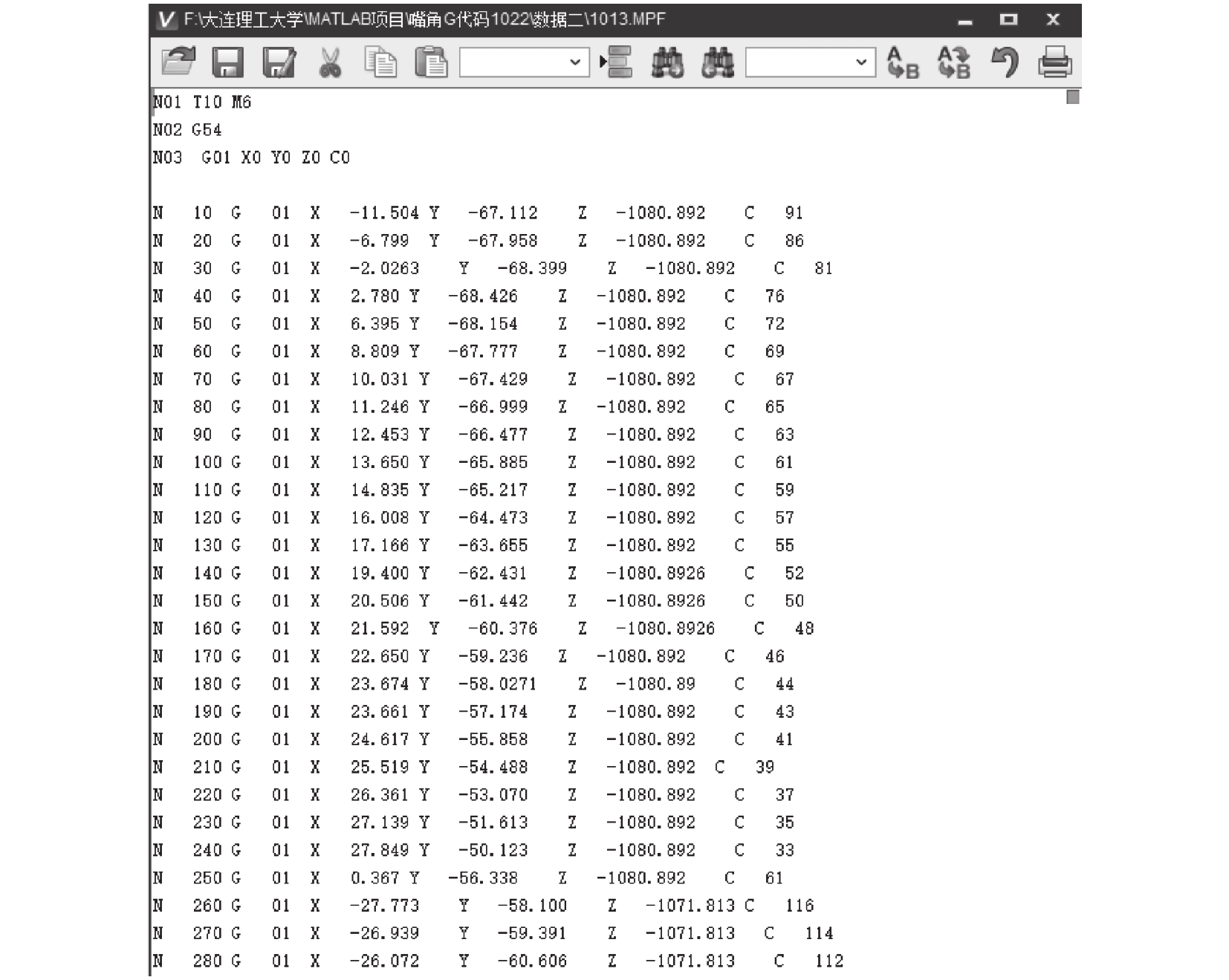
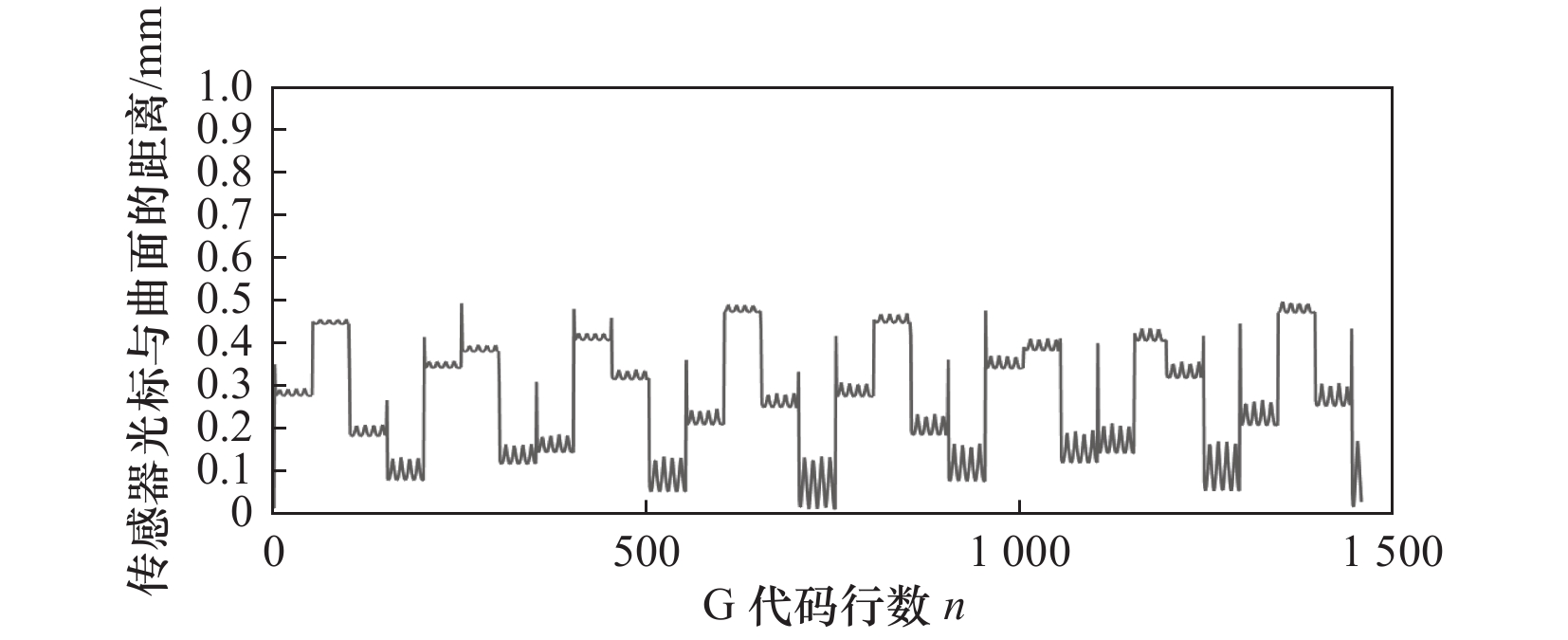
表 1 传感器在不同位置时光标与被测曲面的距离
G代码所
在行数X Y Z C 传感器光标与曲面的距离/mm 1 −11.504 −67.112 −1 080.892 91 0.014 9 2 −6.799 −67.958 −1 080.892 86 0.352 0 3 −2.026 −68.399 −1 080.892 81 0.277 7 4 2.780 −68.426 −1 080.892 76 0.278 3 5 6.395 −68.154 −1 080.892 72 0.280 1 6 8.809 −67.777 −1 080.892 69 0.283 0 7 10.031 −67.429 −1 080.892 67 0.286 9 8 11.246 −66.999 −1 080.892 65 0.292 0  下载: 导出CSV
下载: 导出CSV
-
[1] 林琪锋, 荆嘉欣, 邹剑涛, 等. 基于激光位移传感器的三维曲面逆向建模系统开发[J]. 价值工程, 2019, 38(20): 140-142. [2] 李兵, 孙彬, 陈磊, 等. 激光位移传感器在自由曲面测量中的应用[J]. 光学精密工程, 2015, 23(7): 1939-1947. [3] 方喜峰, 罗晓梅, 徐精英, 等. 大型船用螺旋桨桨毂粗加工刀具路径规划研究[J]. 现代制造工程, 2021(1): 69-74. [4] 胡凌燕, 何声星, 熊鹏文, 等. 基于点云模型的虚拟手术系统建模及碰撞检测[J]. 数据采集与处理, 2016, 31(5): 903-910. [5] 梁周雁, 邵为真, 孙文潇, 等. 基于PCL的点云数据空间管理及近邻搜索[J]. 北京测绘, 2018, 32(1): 52-57. [6] 姜晓路, 刘渊. 基于混合包围盒的碰撞检测算法优化[J]. 计算机工程, 2012, 38(9): 285-287. [7] 周艳飞, 王子牛. 基于OBB与八叉树的数控加工碰撞干涉算法的研究[J]. 贵州大学学报:自然科学版, 2012, 29(5): 68-71. [8] 孙秀宁. 大规模点云数据的空间管理及其可视化[D]. 青岛: 山东科技大学, 2014. [9] 高骏, 杜柳青. 基于VERICUT的虚拟龙门加工中心建模和仿真关键技术研究[J]. 组合机床与自动化加工技术, 2020(5): 116-118,123. doi: 10.13462/j.cnki.mmtamt.2020.05.029 [10] 肖善华, 袁永富. 叶轮在MasterCAM软件中的轨迹设置与VERICUT优化加工[J]. 机床与液压, 2014(10): 59-63,71. doi: 10.3969/j.issn.1001-3881.2014.10.018 [11] 刘江然. 基于UG和VERICUT的五轴加工中心数控加工与仿真研究[J]. 石家庄职业技术学院学报, 2022, 34(2): 24-31. -

 下载:
下载:



 点击查看大图
点击查看大图

图(11) / 表(1)
计量
- 文章访问数: 50
- HTML全文浏览量: 30
- PDF下载量: 13
- 被引次数: 0


