

Collaborative motion trajectory planning for dual industrial robots with different constraints
-
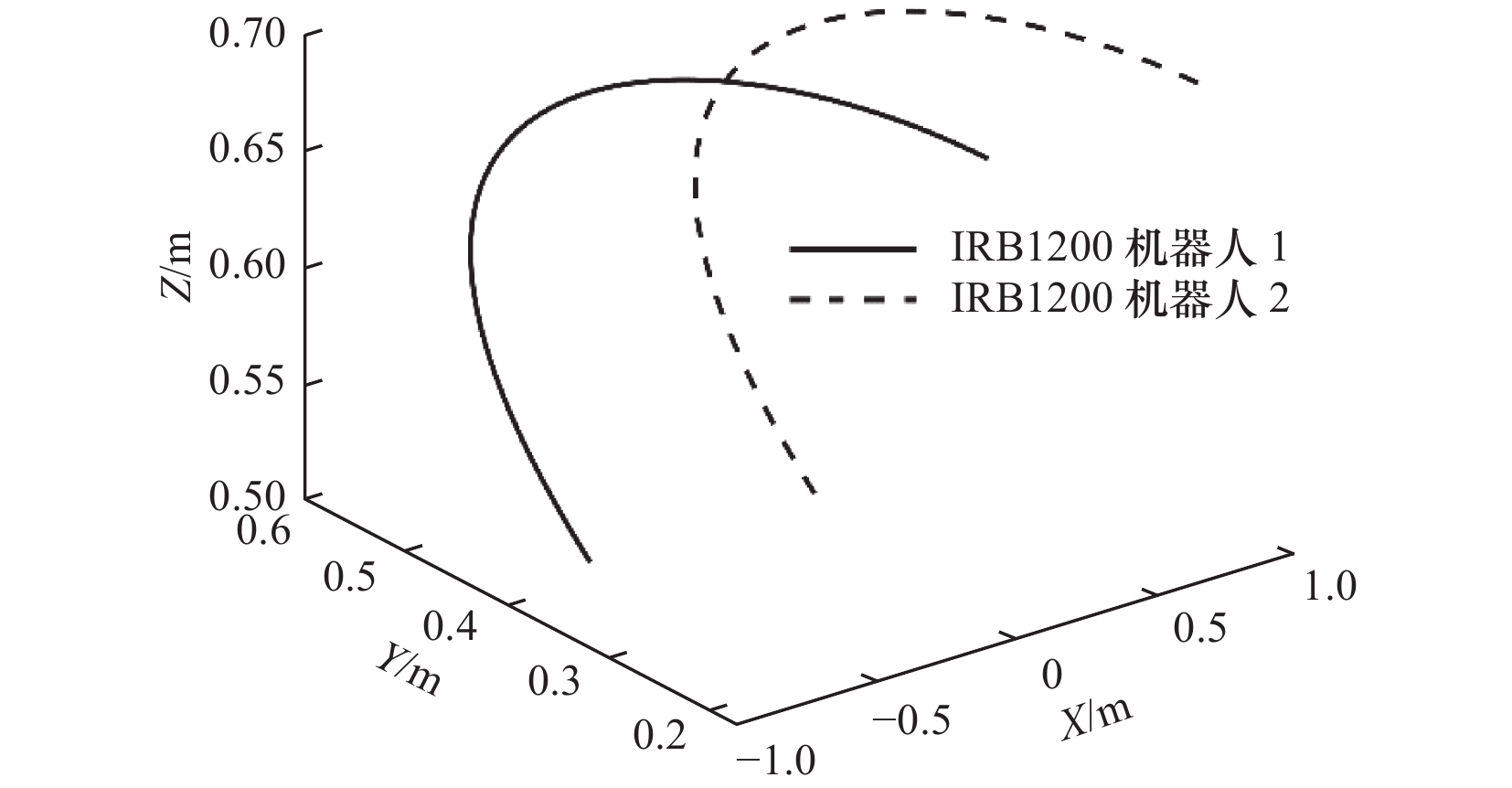
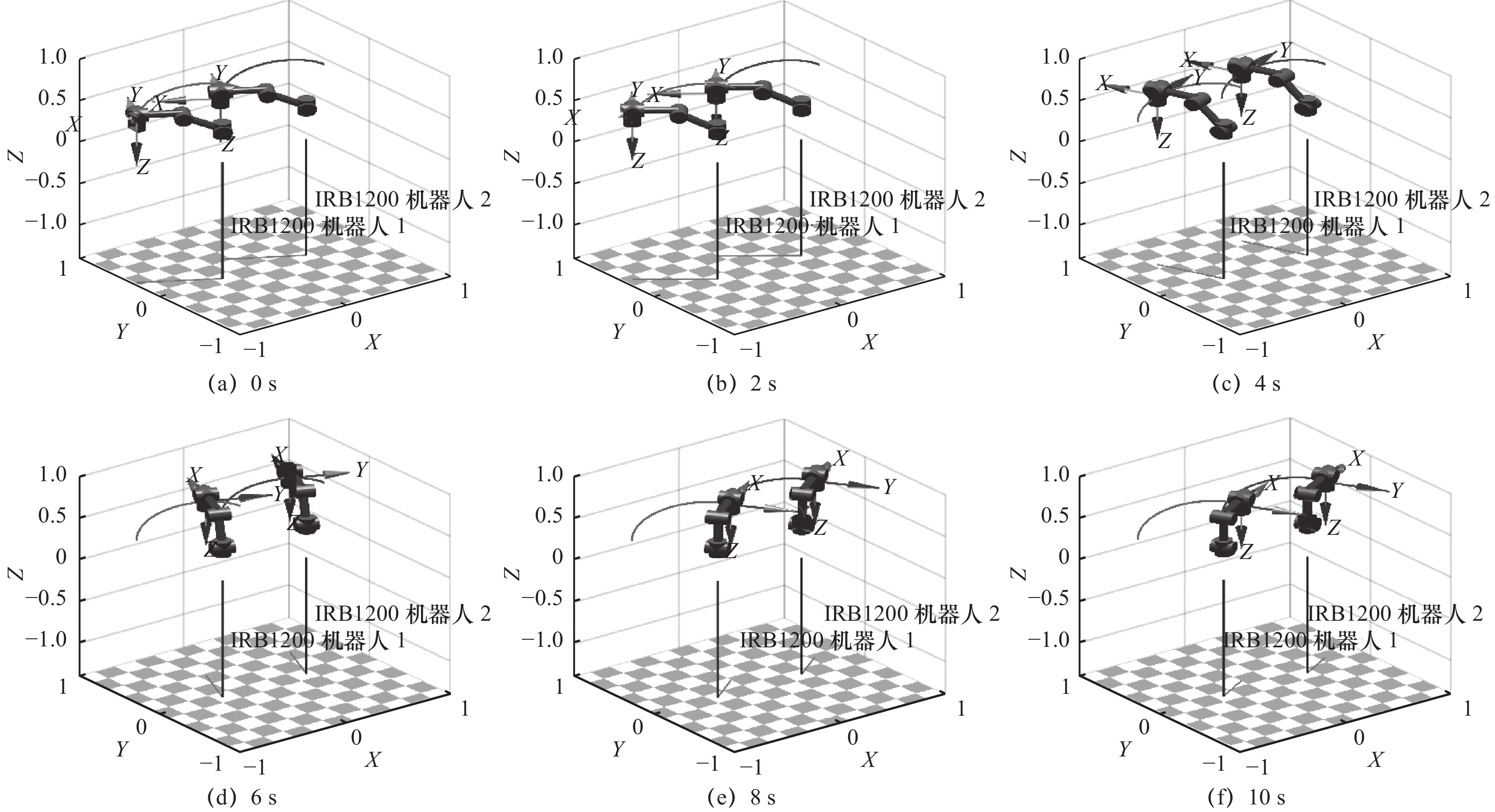
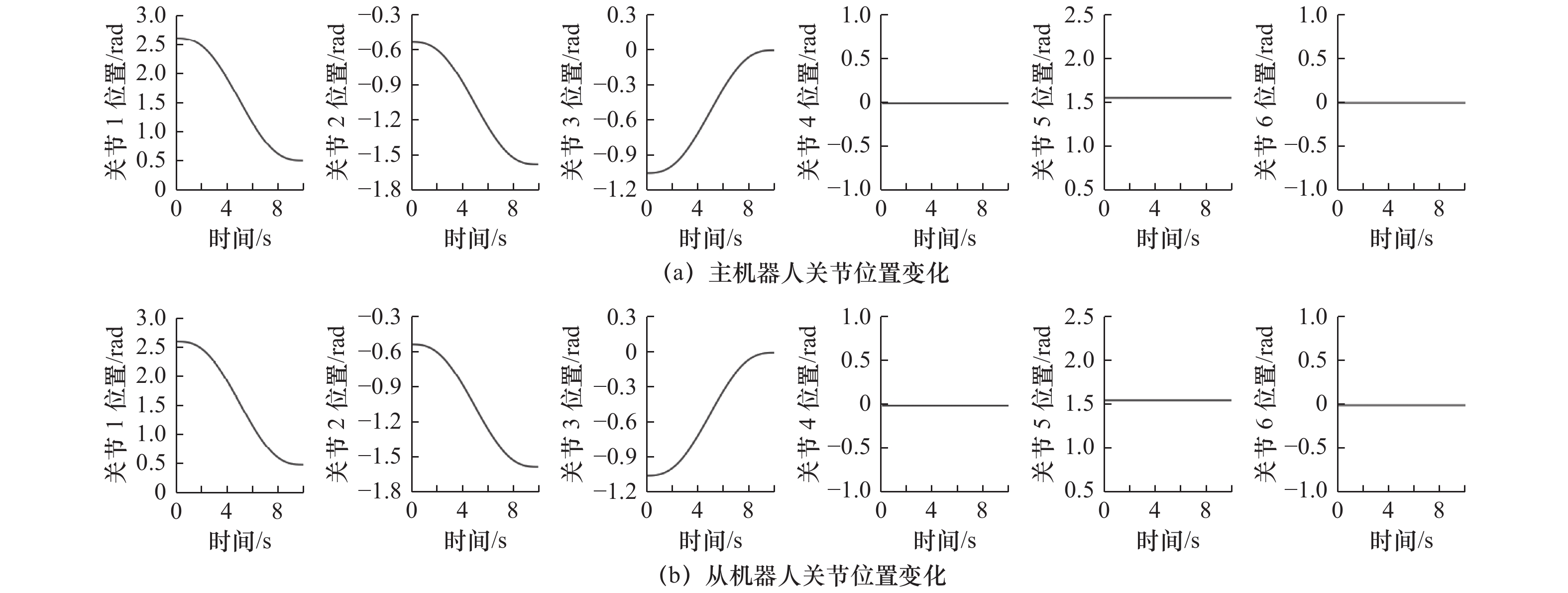
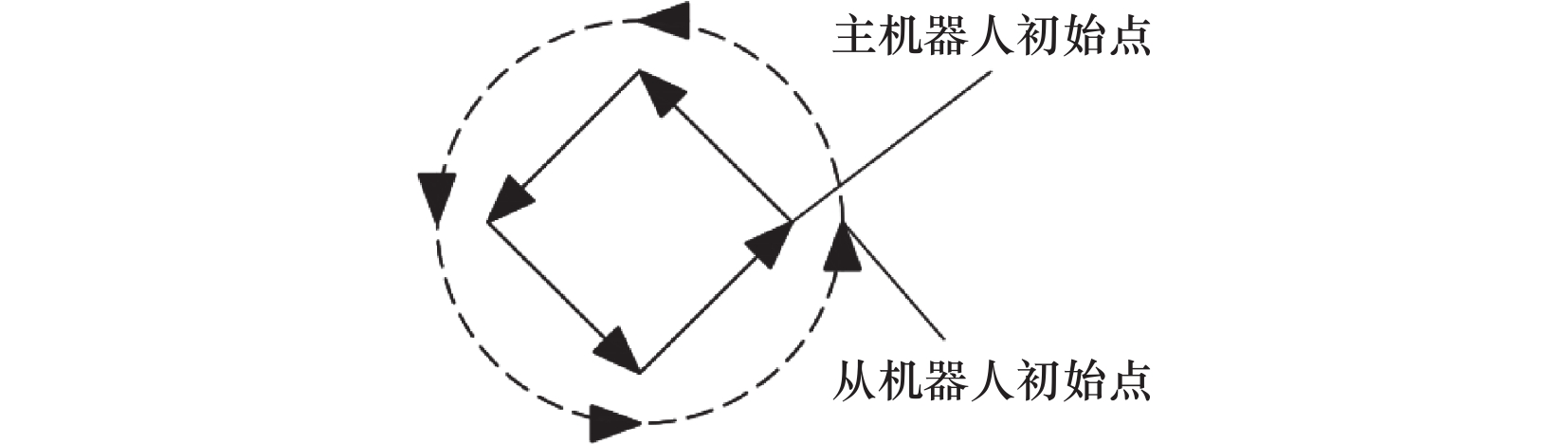
摘要: 针对双工业机器人协作过程中的轨迹规划问题,对IRB200机器人进行建模,并求解机器人的正逆运动学。结合求解的正逆运动学提出紧约束下耦合运动和松约束下叠加运动算法。紧约束将机器人末端执行器之间建立不变的约束关系,实现机器人末端执行器之间产生耦合运动;松约束将机器人末端执行器之间建立随时间变化的约束关系,实现机器人末端执行器之间产生叠加运动。最终在MATLAB中分别进行协同搬运、协同绘制“铜钱”仿真实验验证算法,从姿态图、轨迹图及从机器人理论位置和实际位置对比能够看出,在不考虑机械误差、标定误差及机器人制造误差的情况下能够满足相关任务要求,实现从机器轨迹的自适应规划,避免对双工业机器人分别进行轨迹规划。Abstract: For the trajectory planning problem in the collaboration process of dual industrial robots, modeling the IRB200 robot and solving the forward and reverse kinematics of the robot. The coupled motion under tight constraint and superposition motion under loose constraint algorithms are proposed in combination with the solved forward and inverse kinematics. The tight constraint establishes the constant constraint relationship between the robot end-effectors to realize the coupling motion between the robot end-effectors; the loose constraint establishes the time-varying constraint relationship between the robot end-effectors to realize the superposition motion between the robot end-effectors. Finally, the algorithm is verified by the simulation experiments of cooperative handling and cooperative drawing of “copper coins” in MATLAB. The adaptive planning of the trajectory can avoid the separate trajectory planning of the dual industrial robots.
-
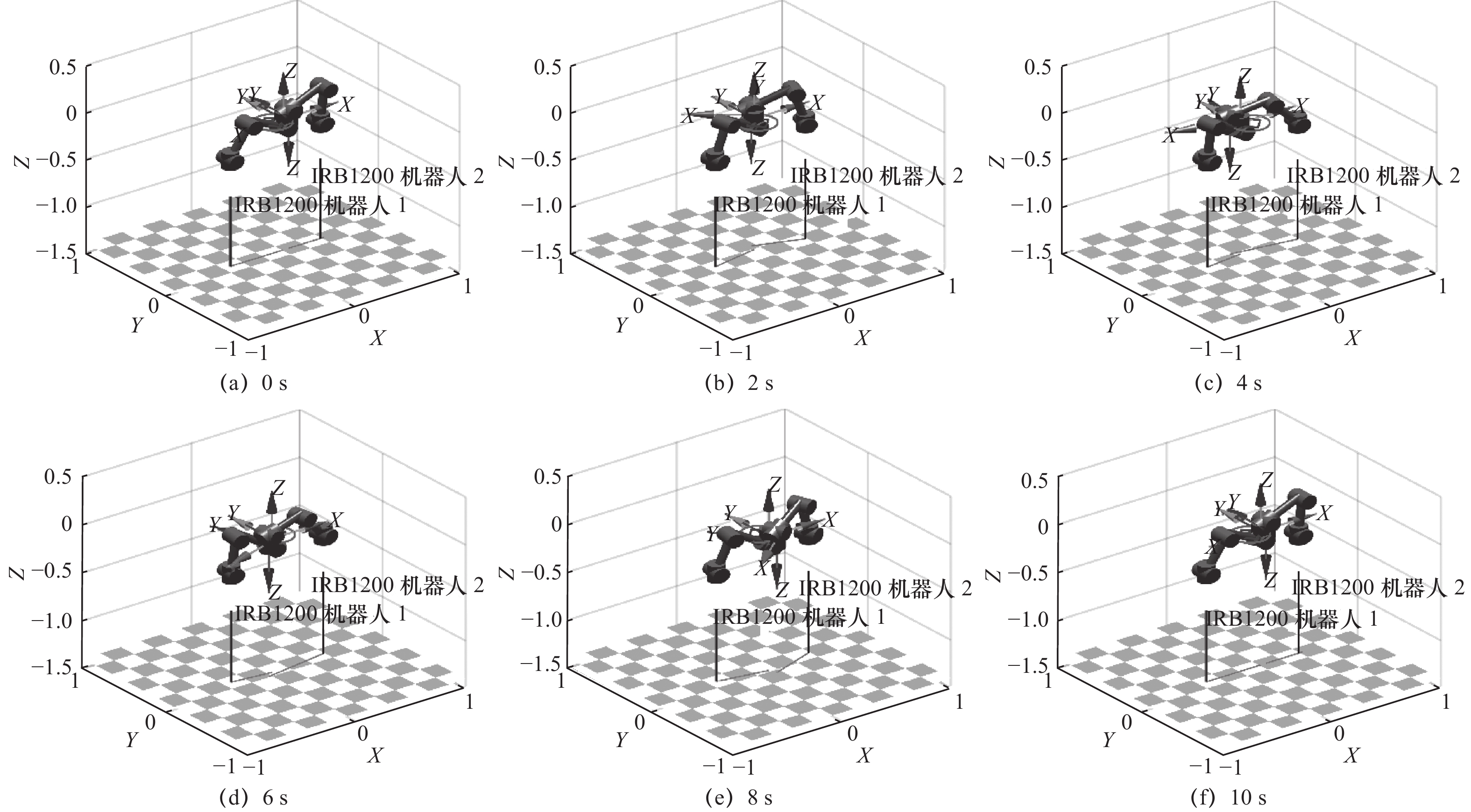
表 1 从机器人末端实验位置和理论位置(协同搬运)
时间 /s 实验位置/mm 理论位置/mm x y z x y z 2 -113.381 2 386.488 5 552.051 6 -113.381 2 386.488 5 552.051 6 4 183.447 7 538.495 1 623.334 2 183.447 7 538.495 1 623.334 2 6 573.574 4 431.623 2 689.839 1 573.574 4 431.623 2 689.839 1 8 697.458 5 223.747 6 708.356 4 697.458 5 223.747 6 708.356 4 10 703.974 9 175.500 0 709.000 0 703.974 9 175.500 0 709.000 0  下载: 导出CSV
下载: 导出CSV
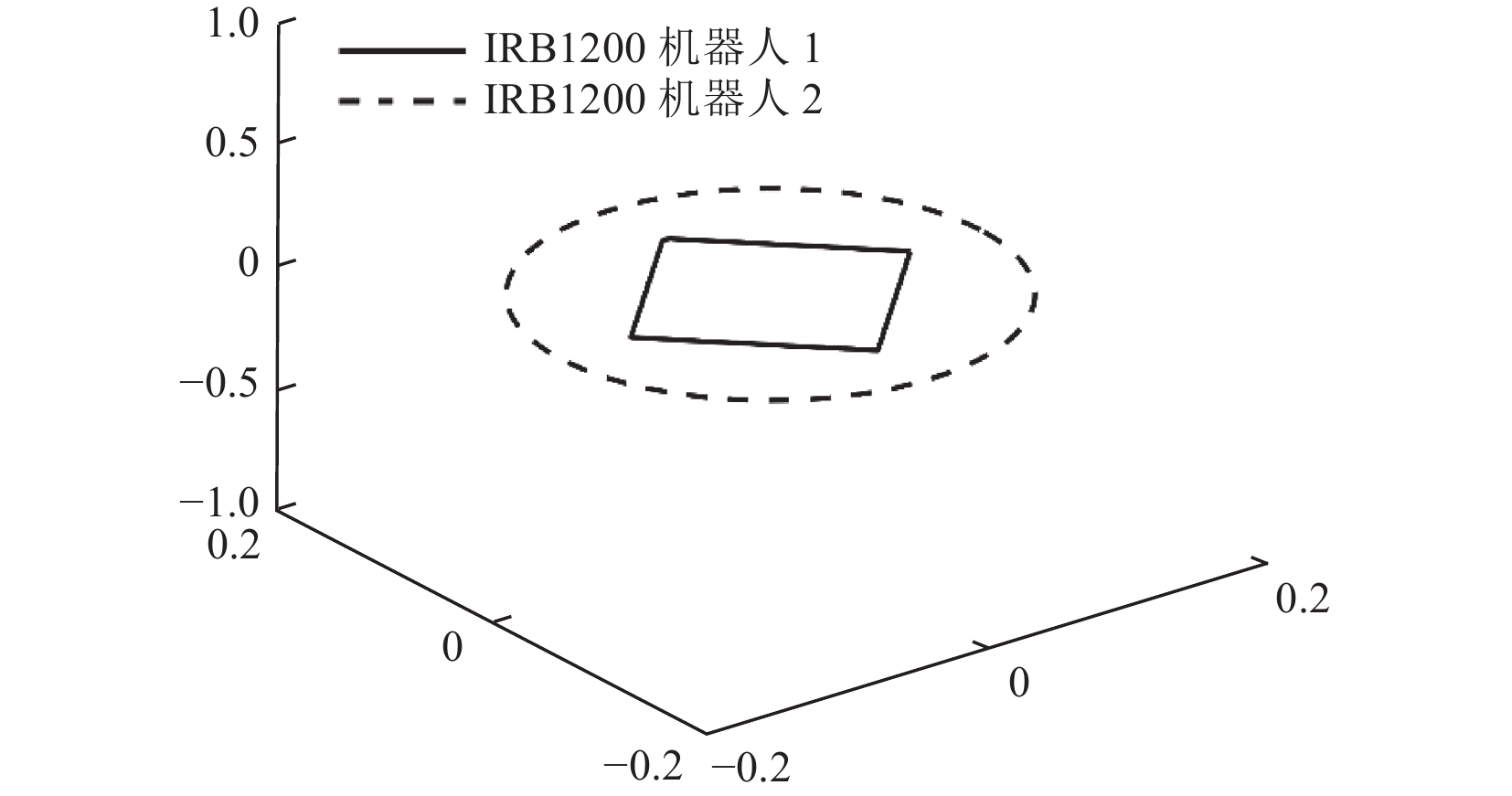
表 2 从机器人末端实验位置和理论位置(协同画圆画方)
时间/s 实验位置/mm 理论位置/mm x y z x y z 2 46.352 3 142.657 7 0.000 0 46.352 3 142.657 7 0.000 0 4 −121.352 7 88.167 8 0.000 0 −121.352 7 88.167 8 0.000 0 6 −121.352 5 −88.167 8 0.000 0 −121.352 5 −88.167 8 0.000 0 8 46.352 8 −142.659 3 0.000 0 46.352 8 −142.65 3 0.000 0 10 150.000 0 0.000 0 0.000 0 150.000 0 0.000 0 0.000 0
下载: 导出CSV
-
[1] 赵娜, 岳建锋, 李亮玉, 等. 双机器人主从协调焊接的路径规划算法[J]. 焊接学报, 2015, 36(3): 67-70,4. [2] 张磊, 王威. 双机器人协同搬运运动学分析及路径规划[J]. 机械工程与自动化, 2020(2): 89-91,94. doi: 10.3969/j.issn.1672-6413.2020.02.032 [3] John J Craig. 机器人学导论[M]. 3版. 贠超,等译.北京: 机械工业出版社, 2012: 161-175. [4] Davidson J R , Hohimer C J , Mo C , et al. Dual robot coordination for apple harvesting[C]. Asabe International Meeting,2017: 1-9. [5] 孟石, 戴先中, 甘亚辉. 多机器人协作系统轨迹约束关系分析及示教方法[J]. 机器人, 2012, 34(5): 546-552,565. [6] 林志峰. 双臂机器人协调运动规划方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2021. [7] 王春璐, 王士军, 孟令军, 等. 基于MATLAB的AUBO-i5协作机器人运动学分析与轨迹规划[J]. 制造技术与机床, 2020(12): 49-54. doi: 10.19287/j.cnki.1005-2402.2020.12.009 [8] 檀祝新, 余晓流, 高文斌. 一种六自由度上肢康复训练机器人运动学及工作空间仿真分析[J]. 机床与液压, 2019, 47(3): 32-36. doi: 10.3969/j.issn.1001-3881.2019.03.007 [9] 韩啸宇, 葛正浩, 申娇娟. 可重构冲压机械手的设计与运动学分析[J]. 机床与液压, 2018, 46(21): 81-83. doi: 10.3969/j.issn.1001-3881.2018.21.017 [10] 孟广双, 高德东. 改进蝴蝶优化算法及其在冗余机械臂逆运动学求解中的应用[J]. 制造技术与机床, 2022(8): 91-96. [11] 周琪钧. 工业机器人轨迹规划及其控制系统研究[D]. 天津: 天津理工大学, 2022. -

 下载:
下载:


 点击查看大图
点击查看大图

图(8) / 表(2)
计量
- 文章访问数: 73
- HTML全文浏览量: 12
- PDF下载量: 37
- 被引次数: 0


