

Research on influence of cycloidal gear profile modification of robot RV reducer based on load carrying capacity and transmission efficiency optimization
-
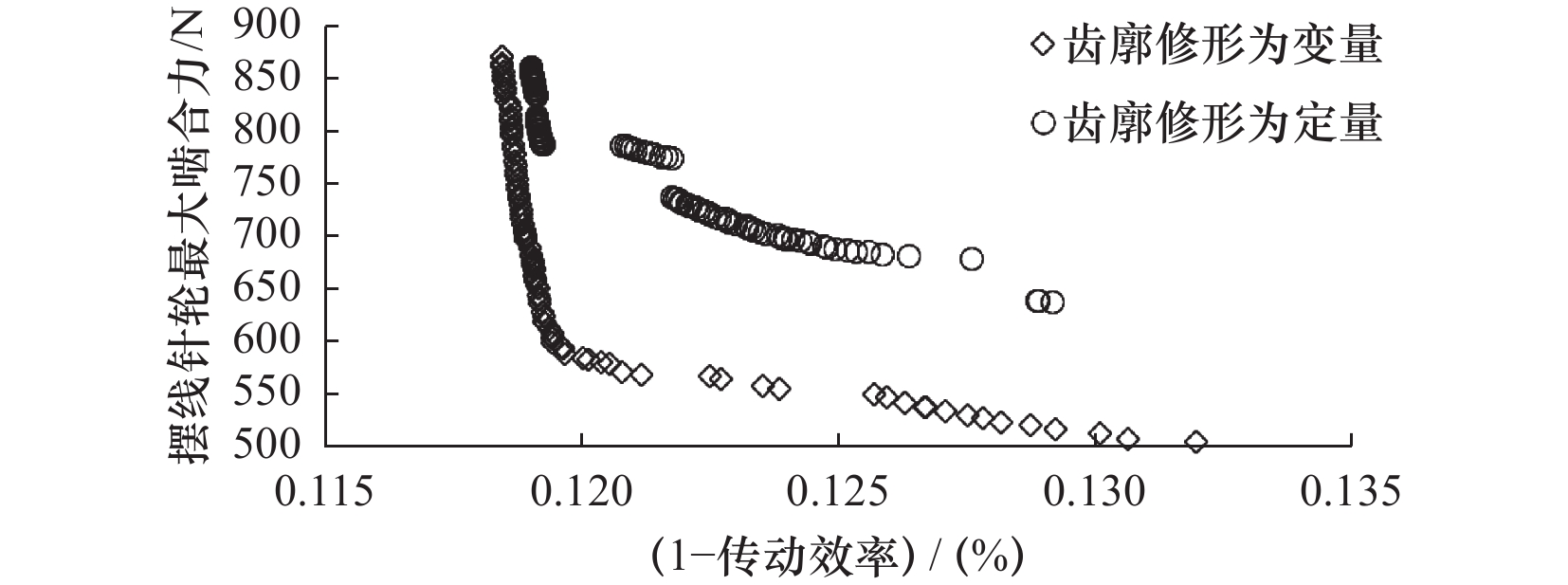
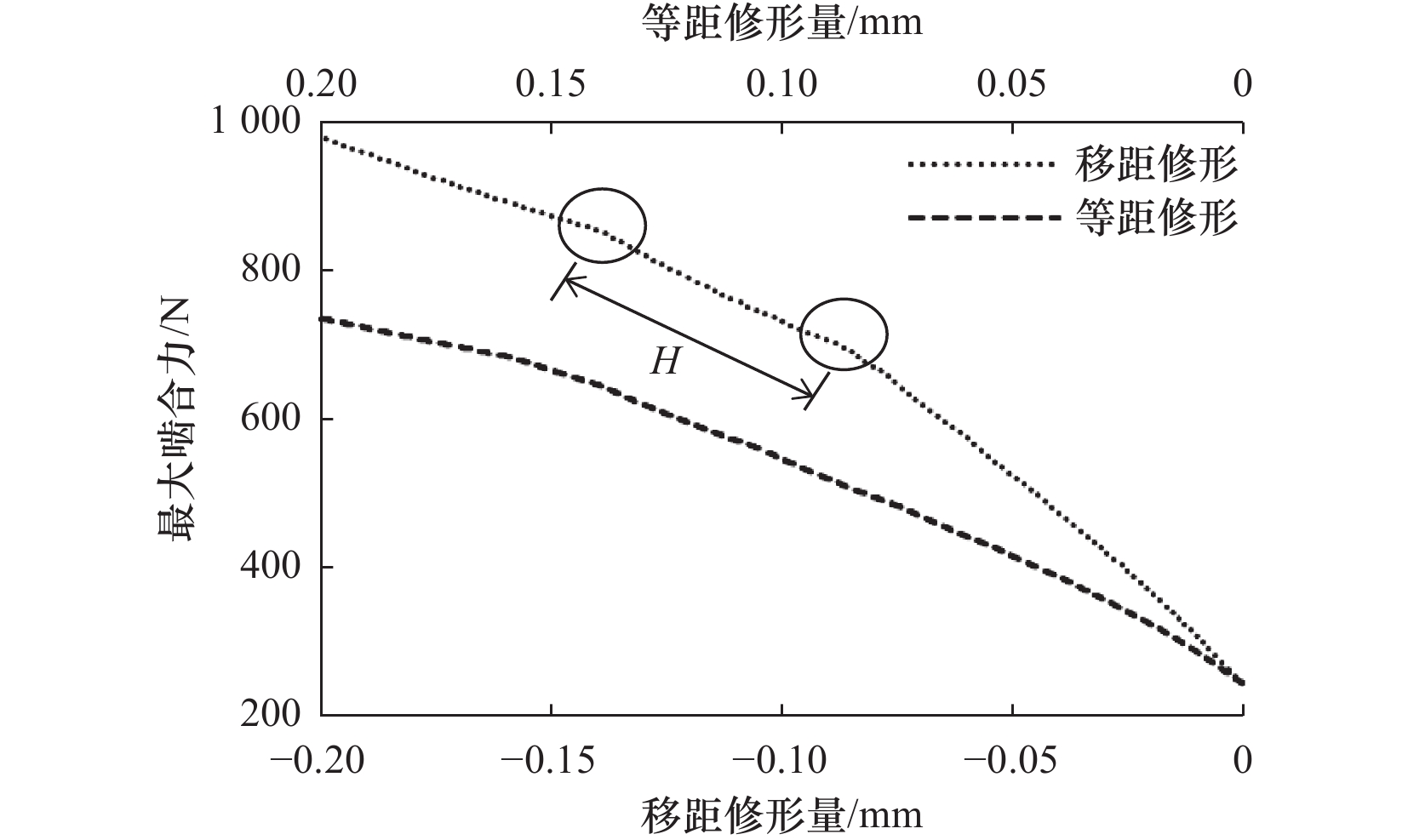
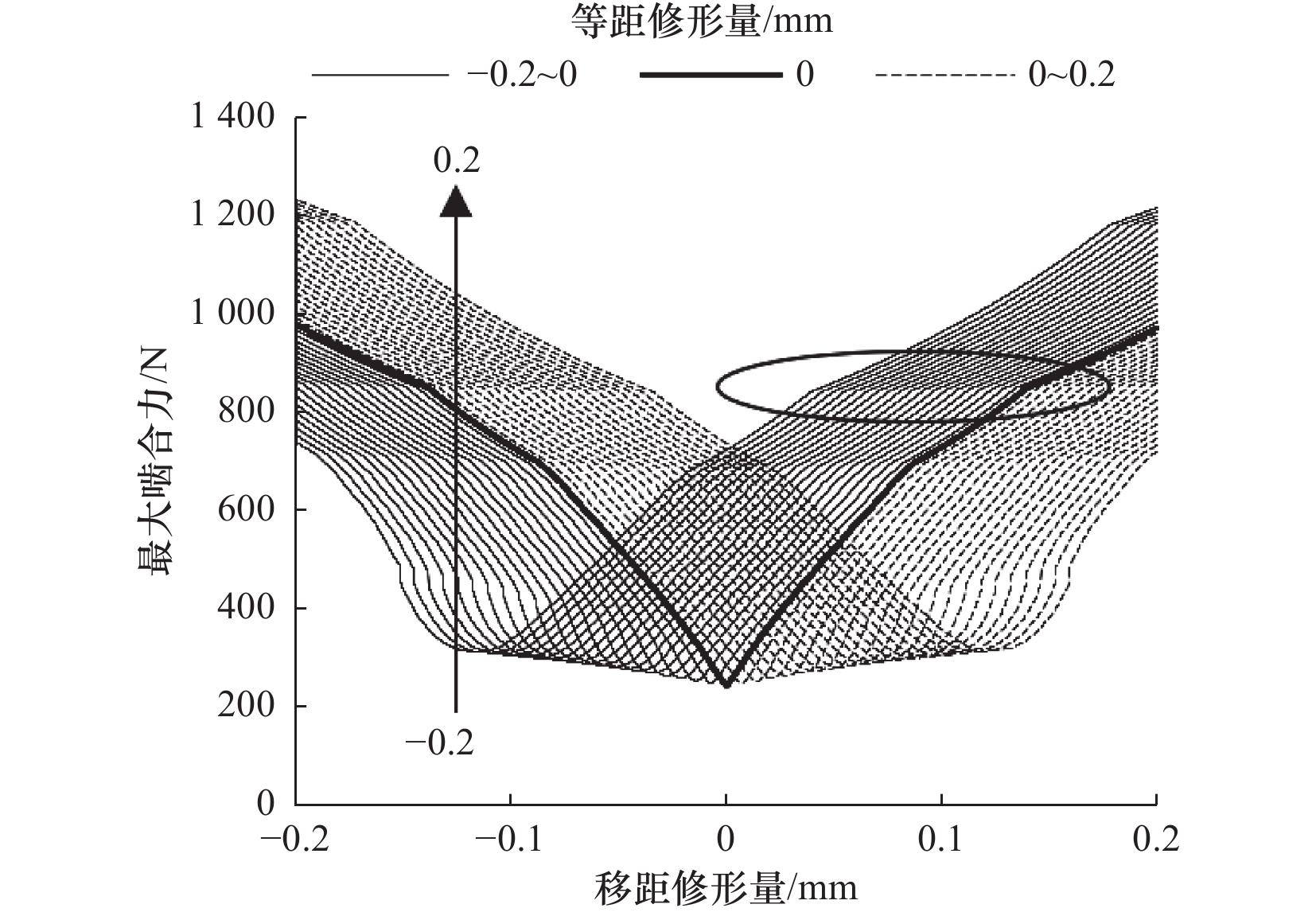
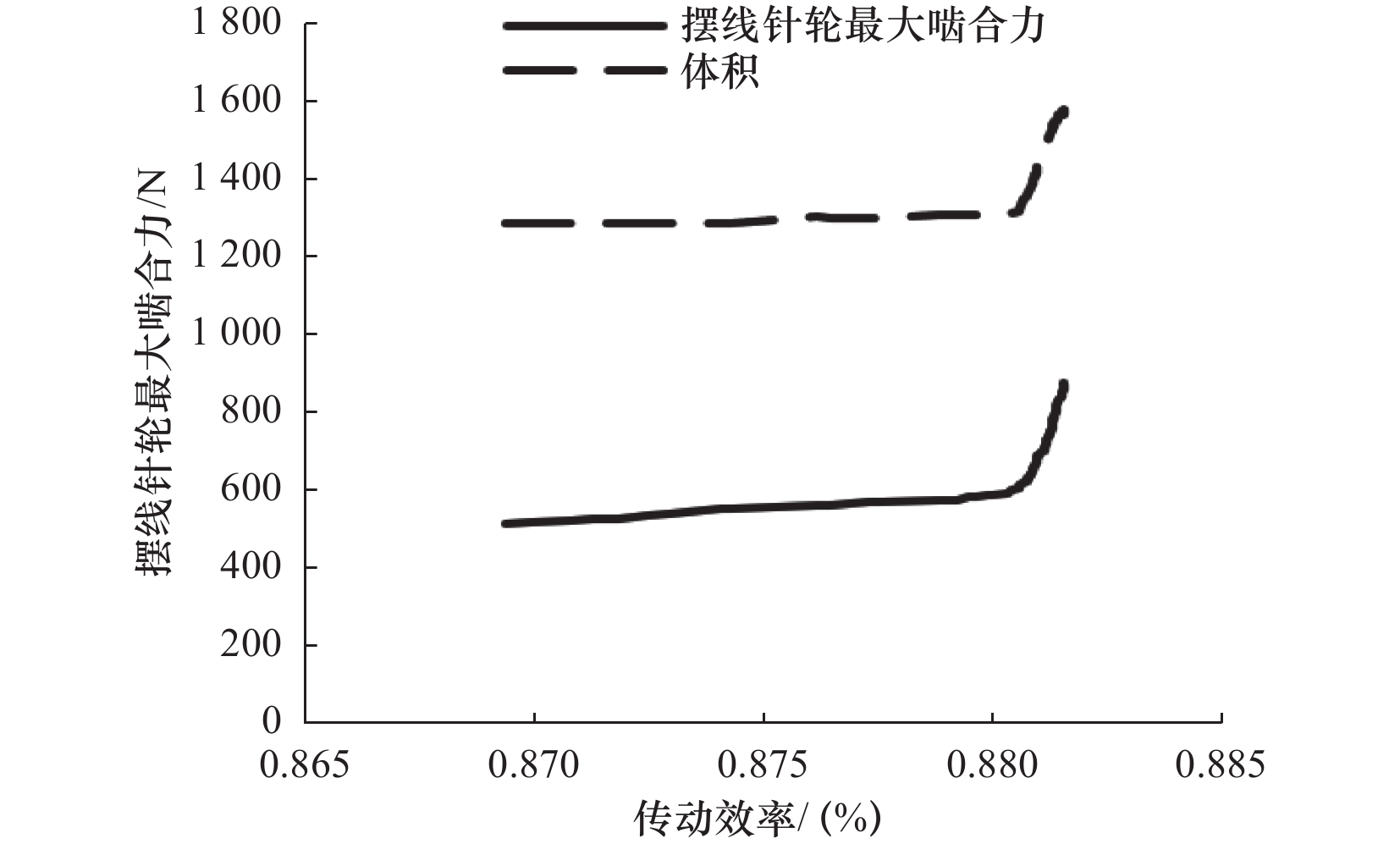
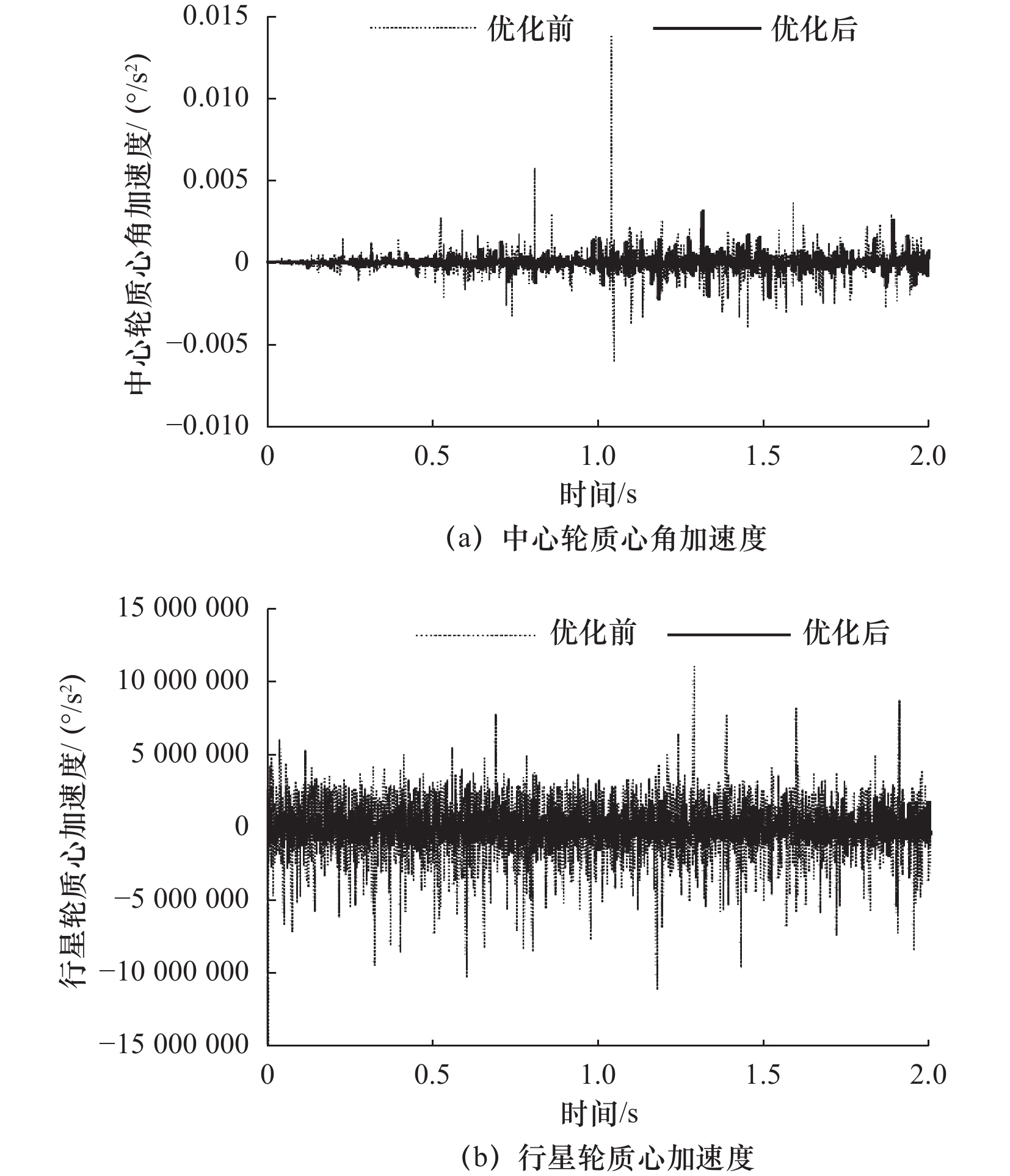
摘要: 针对RV减速器常规结构设计过程中未考虑摆线轮齿廓修形影响的现状,为实现RV减速器精确的动力学结构设计,提出一种基于承载能力和传动效率优化的RV减速器摆线轮齿廓“负移距–正等距”或“正移距–负等距”组合修形方法。将承载能力最大和传动效率最高作为优化目标,选取对其影响较大的关键参数作为设计变量,考虑齿廓修形影响,对RV减速器开展多目标优化研究。采用NSGA-Ⅱ算法进行求解,并基于TOPSIS和CRITIC相结合的多目标决策方法确定Pareto解集中的最优参数方案。研究结果表明:相比于原始设计,采用“负移距–正等距”或“正移距–负等距”修形对啮合力的影响相对于“负移距–负等距”和“正移距–正等距”较为平缓,齿廓修形设计更为容易。优化后整机传动效率提高了0.96%,最大啮合力减小了35.98%,啮合齿数增加,传动更为平稳,显著改善了RV减速器的动态性能。Abstract: In view of the current situation that the influence of cycloidal gear tooth profile modification is not considered in the conventional structure design of RV reducer, in order to realize the accurate dynamic structure design of RV reducer, a combined modification method of “negative movement distance-positive equidistance” or “positive movement distance-negative equidistance” of cycloidal gear profile of RV reducer is proposed based on the optimization of load carrying capacity and transmission efficiency. With the maximum load carrying capacity and maximum transmission efficiency as the optimization objectives, the key parameters which have a great influence on them are selected as the design variables, and the influence of tooth profile modification is considered to carry out the multi-objective optimization research on RV reducer. NSGA-Ⅱ algorithm is used to solve the problem, and the optimal parameter scheme of Pareto solution set is determined based on a multi-objective decision method combining TOPSIS and CRITIC. The results show that, compared with the original design, the influence of “negative movement distance-positive equidistance” or “positive movement distance-negative equidistance” modification on the meshing force is smoother than that “negative movement distance-negative equidistance” and “positive movement distance-positive equidistance” modification, and the tooth profile modification design is easier. After optimization, the transmission efficiency of cycloidal pin wheel is increased by 0.96%, the maximum engagement force is reduced by 35.98%, the transmission of the whole machine is more stable, and the dynamic performance of RV reducer is significantly improved.
-
表 1 优化前后结果对比表
优化前 优化后 圆整后 短幅系数$ {K_1} $ 0.812 5 0.865 8 0.8658 太阳轮齿数$ {Z_{{s}}} $ 16 18.958 8 19 摆线轮齿数$ {Z_{{d}}} $ 39 41.026 9 41 摆线轮厚度$ b{/{\rm{mm}}} $ 9 12.943 3 12.9 移距修形量$ {\Delta }{r_{{P}}}{/{\rm{mm}}} $ 0.2 −0.060 1 −0.060 1 等距修形量$ {\Delta }{r_{{{rp}}}}{/{\rm{mm}}} $ 0.15 0.020 1 0.020 1 针齿中心圆半径$ {r_{{P}}}{/{\rm{mm}}} $ 64 79.644 7 79.644 7 针齿半径$ {r_{{{rp}}}}{/{\rm{mm}}} $ 3 3.642 7 3.642 7 传动效率η/(%) 86.93 87.89 87.89 最大啮合力$ {F_{\max }}{/{\rm{N}}} $ 894.293 570.161 572.366 啮合齿数 5 9 9  下载: 导出CSV
下载: 导出CSV
-
[1] Hsieh C F. Traditional versus improved designs for cycloidal speed reducers with a small tooth difference:the effect on dynamics[J]. Mechanism and Machine Theory,2015,86:15-35. doi: 10.1016/j.mechmachtheory.2014.11.013 [2] 秦争争,汪泉,赵大兴,补偿弹性变形的摆线轮齿廓修形方法[J]. 机械强度,2020,42(3):661-666. [3] 陆龙生,张飞翔,唐恒,等. 基于优化承载能力的RV减速器摆线齿轮齿廓的等距–移距修形[J]. 中国机械工程,2019,30(17):2022-2029. [4] 安宗文,贾盼龙,王强,等. 以优化承载能力为目标的RV减速器摆线轮齿廓修形方法[J]. 机械传动,2022,46(1):170-176. [5] 刘江,肖正明,张龙隆,等. 考虑摆线轮磨损的RV减速器传动精度可靠性分析与参数优化[J]. 工程设计学报,2022,29(6):1-9. [6] Yang M D,Zhang D Q,Cheng C,et al. Reliability-based design optimization for RV reducer with experimental constraint[J]. Structural and Multidisciplinary Optimization,2021,63(4):2047-2064. doi: 10.1007/s00158-020-02781-3 [7] 余永康,熊禾根. RV减速器优化设计[J]. 冶金设备,2022(5):14-19. [8] 王明楠,郑鹏. 基于拓扑优化的RV减速器轻量化优化设计[J]. 起重运输机械,2022(13):26-30. [9] 郑胜予,赵刚,肖正明,等. 考虑失效相关性的行星摆线减速器结构多目标优化设计[J]. 机械传动,2022,46(6):64-72. [10] 楼嘉彬,杜雪松,朱才朝. RV减速器可靠性优化设计方法[J]. 机械设计与制造,2021(7):207-211. [11] 张跃明,邵彬,纪姝婷. 基于RV减速器理论模型的固有频率分析[J]. 机械传动,2021,45(10):120-125. [12] 赵大兴,陈少男,王思明. RV减速器摆线针轮传动啮合区间研究[J]. 机械设计与制造,2023,383(1):30-33. [13] 李本. 多失效模式下工业机器人RV减速器可靠性分析与优化[D]. 成都:电子科技大学,2020:53-54. [14] 饶振纲. 行星传动机构设计[M]. 2版. 北京:国防工业出版社,1994:445-474. [15] 饶振纲. RV型行星传动的设计研究[J]. 传动技术,2002(4):6-10. [16] 张景钰. 机器人关节RV减速器研究[D]. 西安:陕西科技大学,2018:31-32. [17] 李群超,张方. 修形前后摆线针轮接触力和啮合齿数对比[J]. 国外电子测量技术,2018,37(5):27-31. doi: 10.19652/j.cnki.femt.1700771 [18] 邢利娜. 摆线针轮行星传动参数化设计及软件开发[D]. 重庆:重庆大学,2010:11-12. [19] 朱梦. RV减速器的动力学特性研究及优化设计[D]. 南京:南京航空航天大学,2018:19-21. [20] 贾兵. 针轮输出新型摆线针轮减速器的优化设计及其动力学性能分析[D]. 大连:大连交通大学,2010:12-13. [21] 汪泉,曾利磊,秦争争. 考虑摆线轮齿廓修形的RV减速器齿轮结构多目标优化设计[J]. 机械传动,2020,44(4):54-60. [22] 李彦章. 基于刚柔耦合的RV减速器关键零件疲劳寿命分析与优化设计[D]. 长春:吉林大学,2022:18-19. [23] Wang R,Gao F,Lu M,et al. Meshing efficiency analysis of modified cycloidal gear used in the RV reducer[J]. Tribology Transactions,2019,62(3):337-349. doi: 10.1080/10402004.2018.1549689 [24] 王心成. 新型精密摆线针轮减速器的设计研究[D]. 扬州:扬州大学,2019:20-22. [25] 王新春. 摆线轮齿廓修形及RV减速器设计[D]. 哈尔滨:哈尔滨工业大学,2017:21-22. [26] 梁强. RV减速器关键部件承载啮合特性与故障动力学仿真分析[D]. 天津:河北工业大学,2022:53-55. [27] 徐磊磊,苏建新. 摆线针轮承载能力优化设计[J]. 机械传动,2022,46(8):67-71,123. [28] 王瑞,陈江义. RV减速器的优化设计[J]. 机械制造,2017,55(9):34-37. [29] 张展. 实用齿轮设计计算手册[M]. 北京:机械工业出版社,2011. [30] 文字章. RV减速器力学特性和优化设计的研究[D]. 武汉:华中科技大学,2021:63-66. [31] 雷明远. 基于遗传算法与BP神经网络的RV减速器结构优化设计[D]. 兰州:兰州理工大学,2021:56-58. [32] 苏德瑜. 基于遗传算法的摆线针轮减速器多目标优化设计[D]. 湘潭:湖南科技大学,2015:27-29. [33] 王文斌. 机械设计手册[M]. 北京:机械工业出版社,2004:17-109. [34] 邓香林,徐峰祥,邹震. 复合空气悬架导向臂仿竹子结构设计及多目标优化方法研究[J]. 重庆理工大学学报:自然科学,2023:1-10. [35] 程健,张钦礼,薛希龙,等. 基于AHP和TOPSIS法的采场结构参数优化研究[J]. 矿冶工程,2014,34(1):1-5. [36] 张玉,魏华波. 基CRITIC的多属性决策组合赋权方法[J]. 统计与决策,2012(16):75-76. [37] 张景钰,曹巨江. 基于遗传算法的RV减速器多目标优化[J]. 陕西科技大学学报,2017,35(6):145-148,170. [38] 董威,韩炬,王志军. RV减速器摆线针轮传动部分啮合仿真分析[J]. 华北理工大学学报:自然科学版,2019,41(3):111-119. -

 下载:
下载:

 点击查看大图
点击查看大图
图(10) / 表(1)
计量
- 文章访问数: 172
- HTML全文浏览量: 89
- PDF下载量: 60
- 被引次数: 0


