

Research on robot floating polishing actuator based on deep reinforcement learning algorithm
-
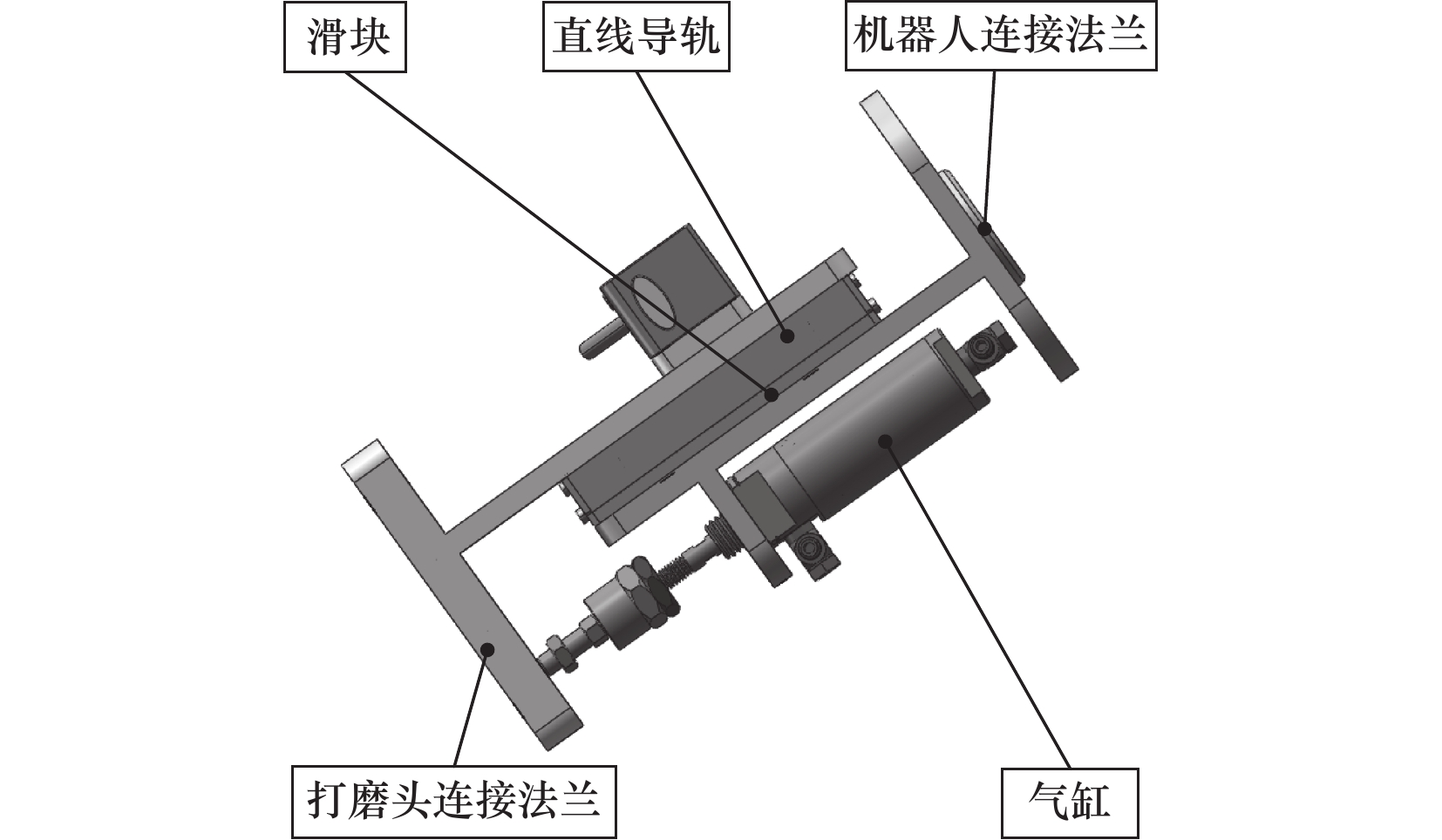
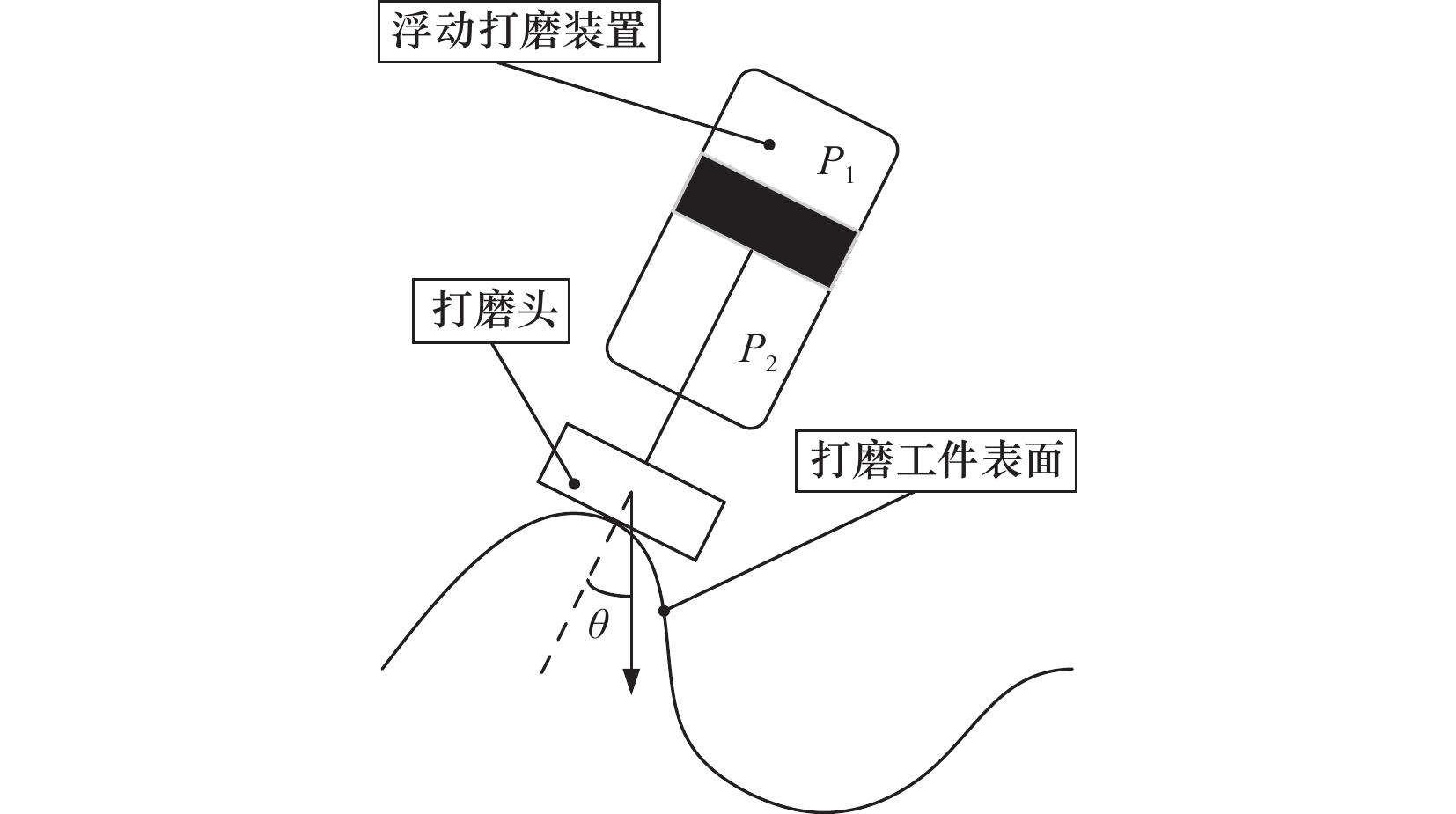
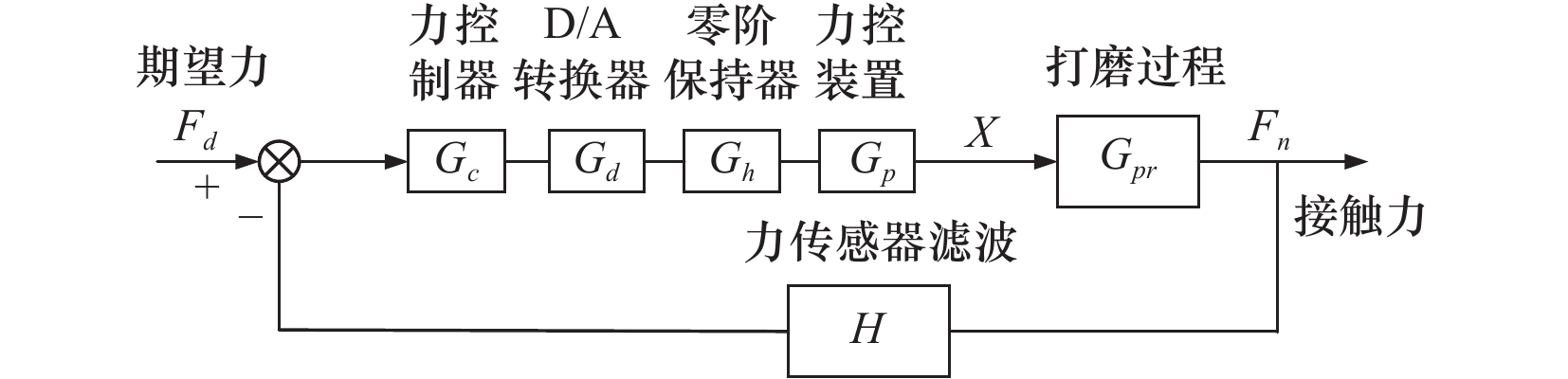
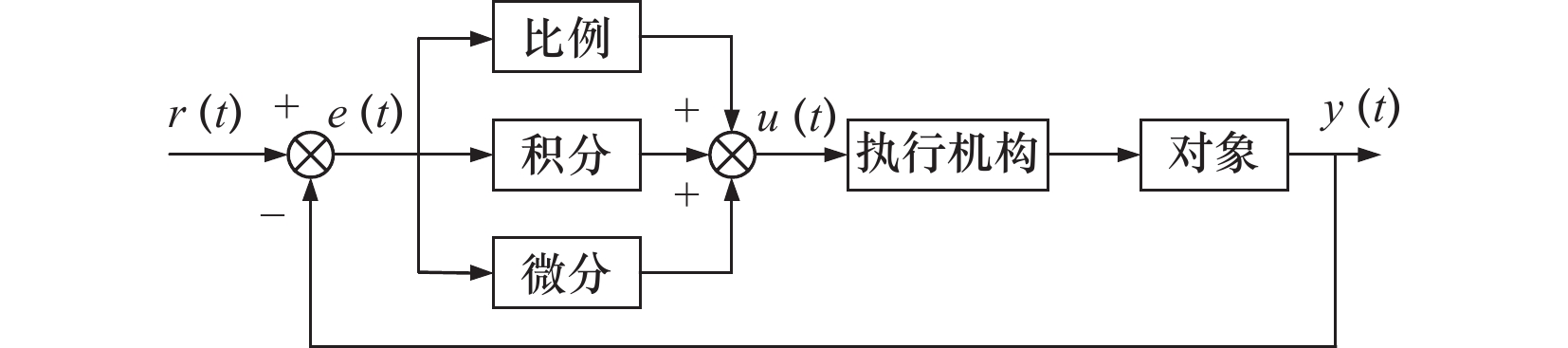
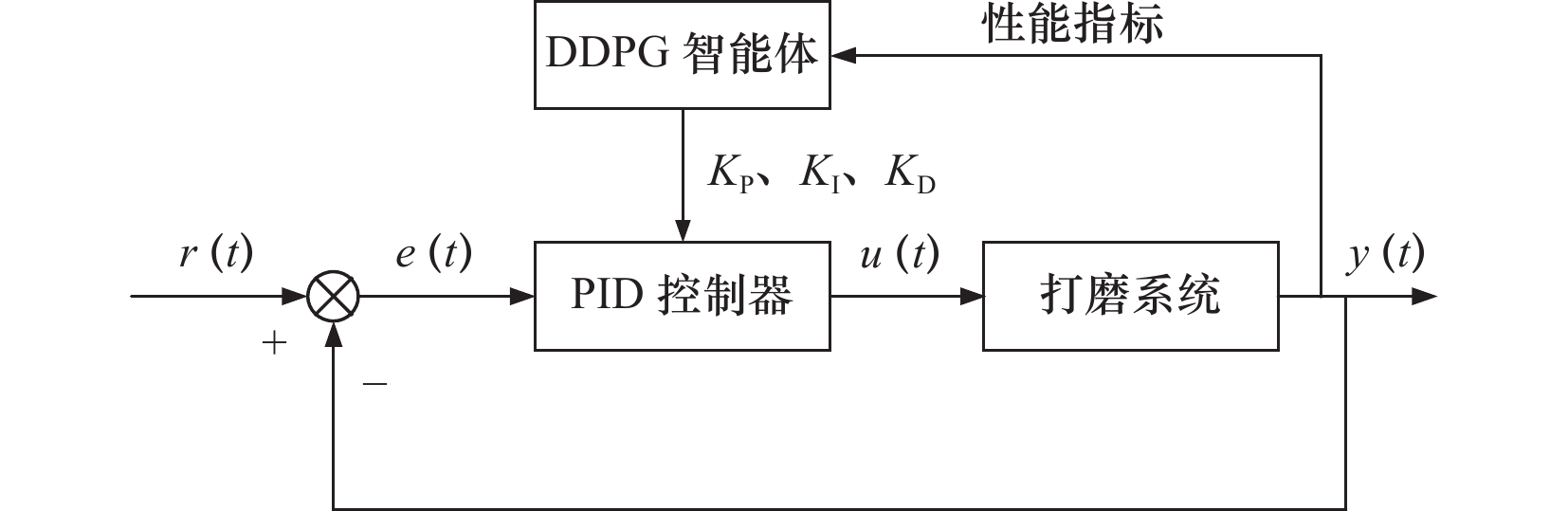
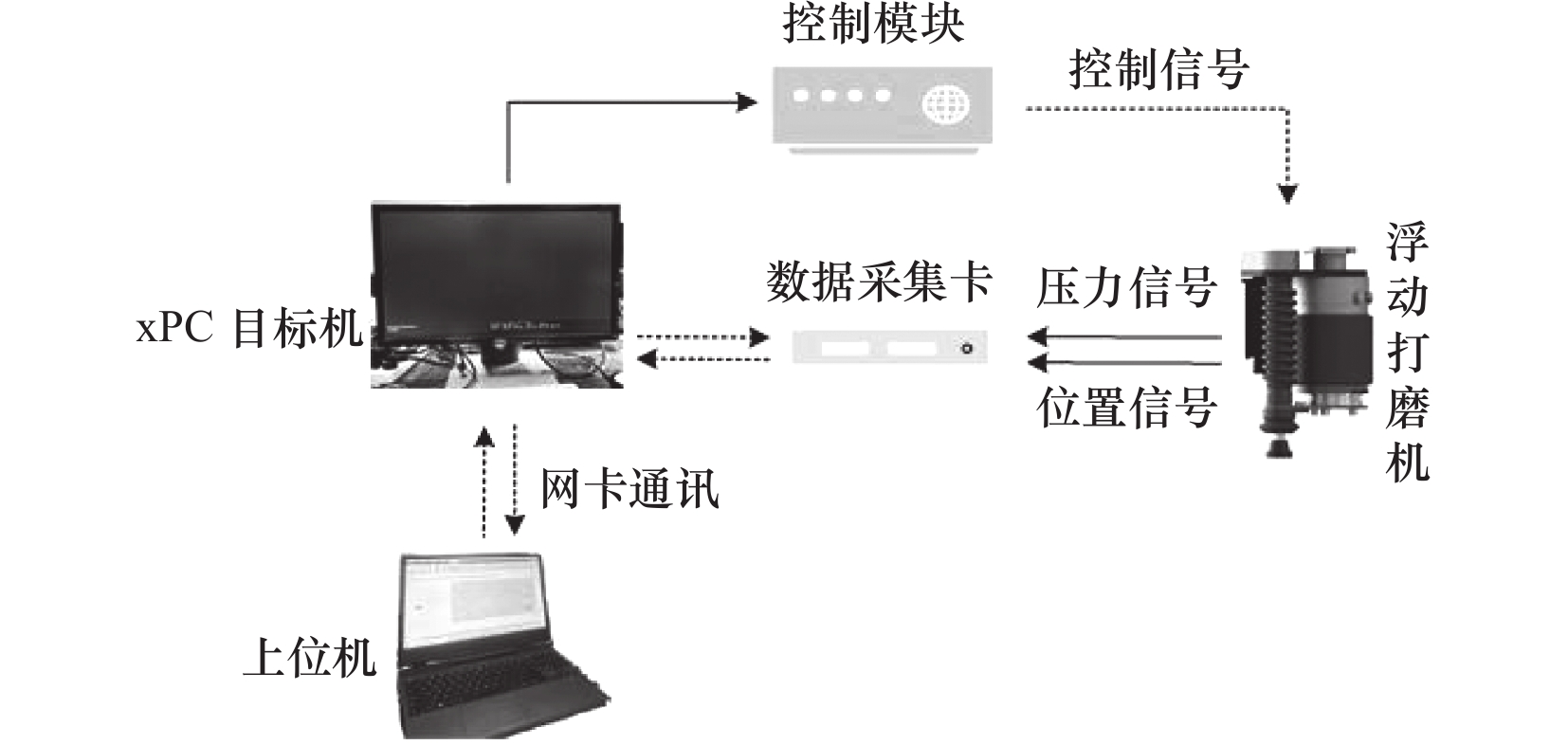
摘要: 为实现机器人恒力打磨的需求,文章设计了浮动打磨执行器,进行了打磨控制算法研究和浮动打磨执行器的结构设计,并对浮动打磨执行器系统进行受力分析和动力学建模。在传统PID控制算法的基础上,采用DDPG深度强化学习算法进行PID控制参数的整定,并开展浮动打磨执行器恒力性能实验验证。实验结果表明,文章设计的浮动打磨执行器能够满足恒力控制的要求。通过DDPG深度强化学习算法对PID控制参数整定,减少了繁琐的调参步骤,且具有更好的恒力控制性能。Abstract: To meet the constant force polishing needs of robots, this paper designs a floating polishing actuator and conducts research on polishing control algorithms. The structural design of the floating polishing actuator was carried out, and the force analysis and dynamic modeling of the floating polishing actuator system were carried out. On the basis of traditional PID control algorithms, the DDPG deep reinforcement learning algorithm is used to tune the PID control parameters. Conduct experimental verification of the constant force performance of the floating polishing actuator, and the experimental results show that the floating polishing actuator designed in this paper can meet the requirements of constant force control. By using the DDPG deep reinforcement learning algorithm to tune PID control parameters, the tedious parameter tuning steps are reduced, and it has better constant force control performance.
-
Key words:
- floating grinding /
- constant force control /
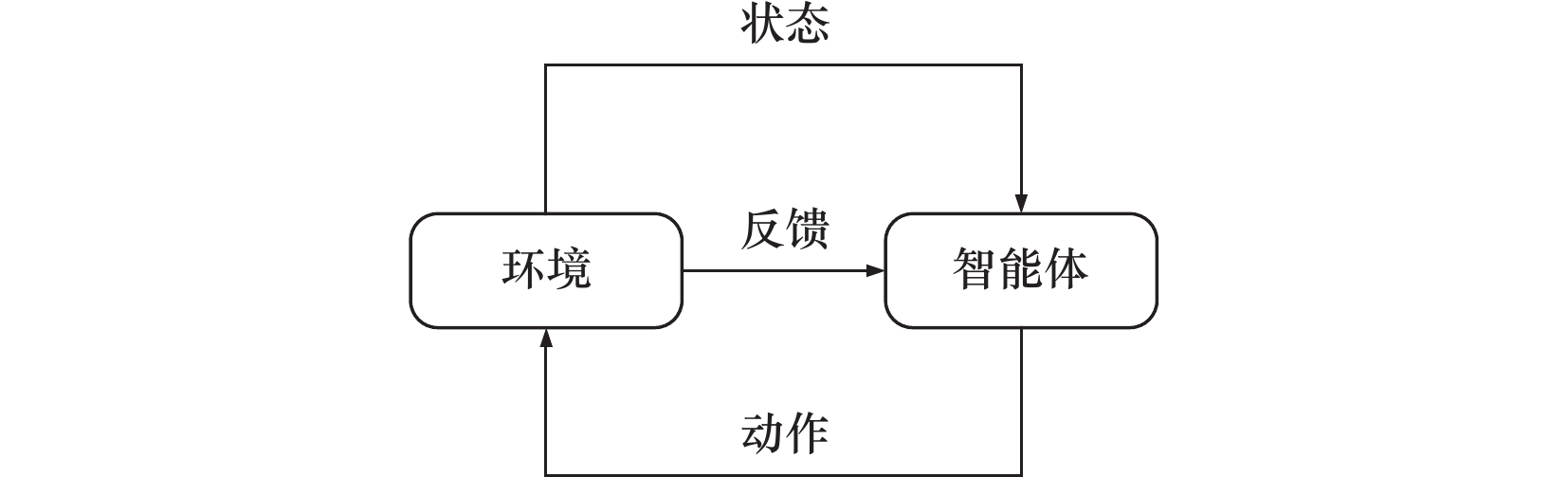
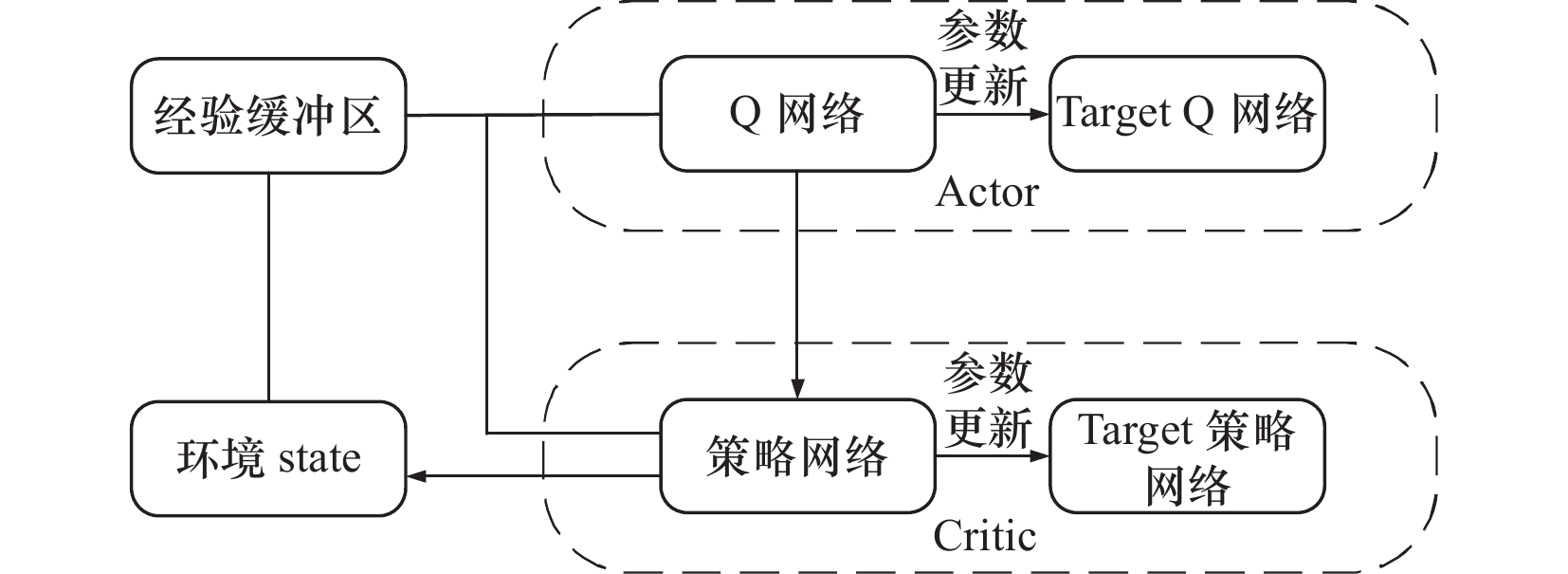
- deep reinforcement learning
-
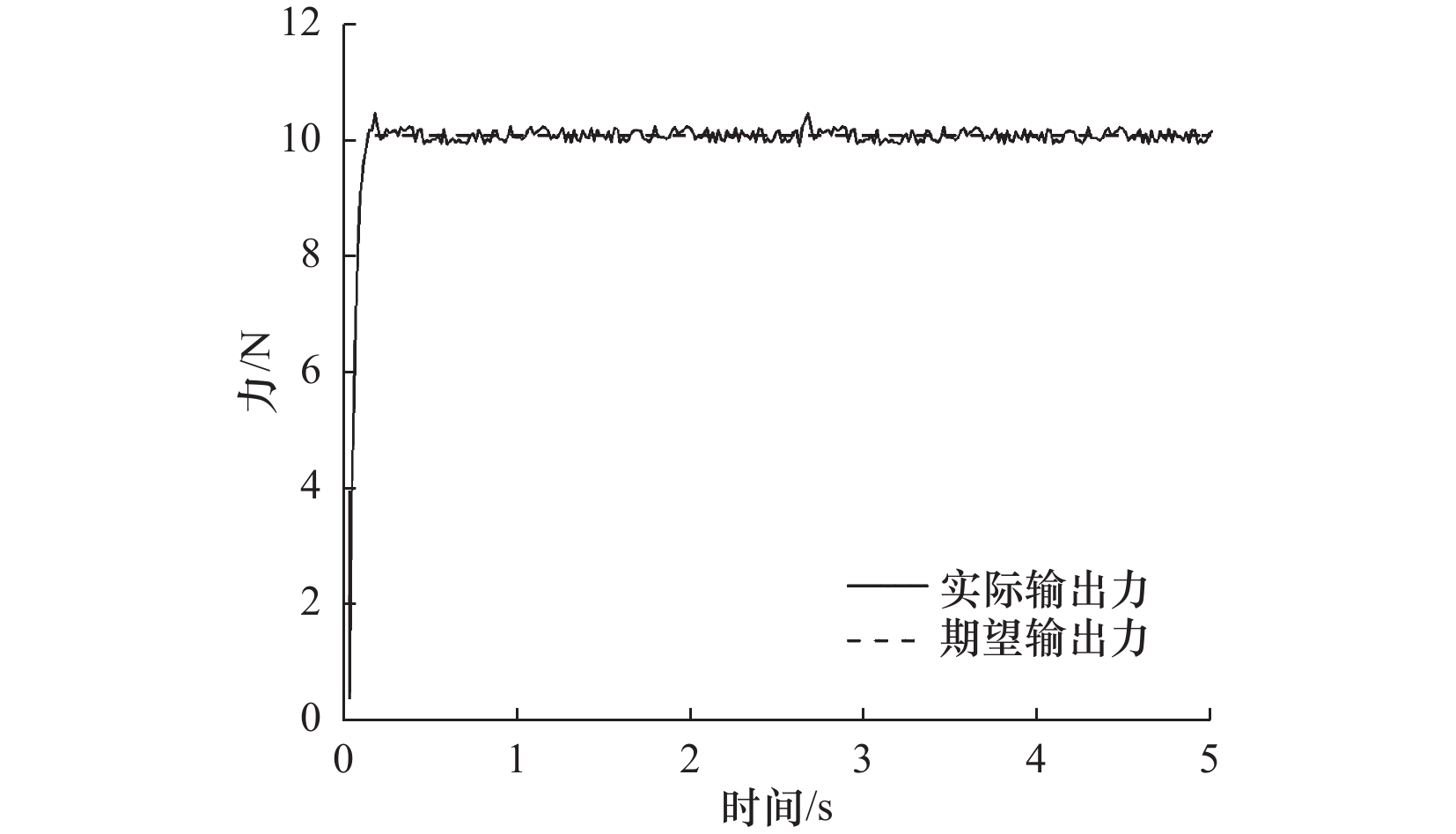
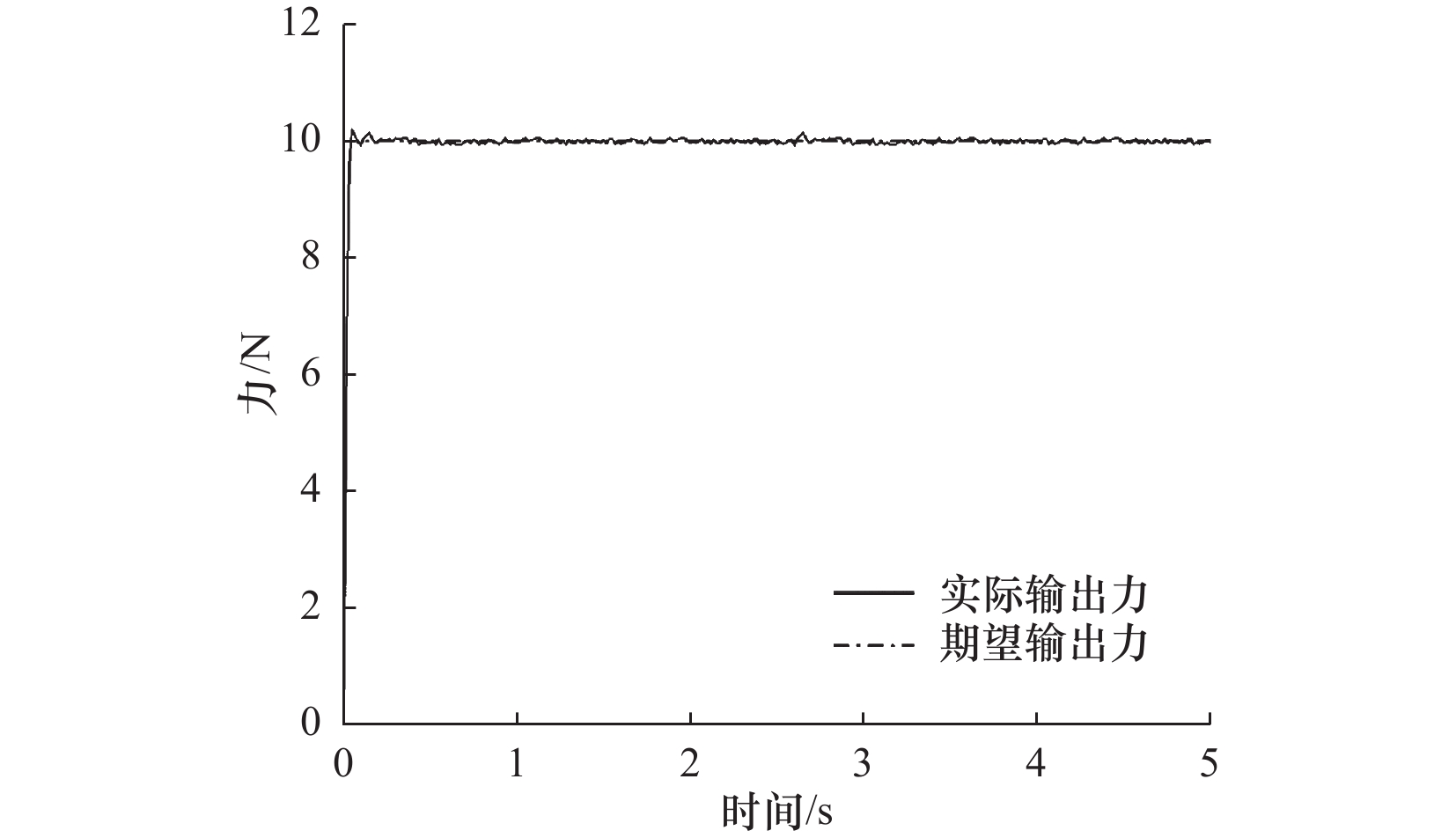
表 1 输出力性能指标比较
性能指标 PID参数控制 DDPG参数整定 力偏差均值/N -0.81 -0.049 力偏差均方差值/N 0.727 0.468 上升时间/s 0.06 0.02  下载: 导出CSV
下载: 导出CSV
-
[1] 赵江天. 工业机器人技术在智能制造中的应用及发展研究[J]. 自动化应用,2023,64(7):16-18. [2] 黄晓伟. 工业机器人自动化打磨方案研究[J]. 工程技术研究,2018(11):180-181. [3] 王友发,周献中. 国内外智能制造研究热点与发展趋势[J]. 中国科技论坛,2016(4):154-160. doi: 10.3969/j.issn.1002-6711.2016.04.025 [4] 袁楚明,张雷,陈幼平,等. 模具曲面机器人智能抛光系统的研究[J]. 高技术通讯,2001,11(9):76-80. doi: 10.3321/j.issn:1002-0470.2001.09.017 [5] Tian F J,Lv C,Li Z G,et al. Modeling and control of robotic automatic polishing for curved surfaces[J]. CIRP Journal of Manufacturing Science and Technology,2016,14:55-64. doi: 10.1016/j.cirpj.2016.05.010 [6] Roswell A,Xi F J,Liu G J. Modelling and analysis of contact stress for automated polishing[J]. International Journal of Machine Tools and Manufacture,2006,46(3-4):424-435. doi: 10.1016/j.ijmachtools.2005.05.006 [7] 冯渊. 工业机器人恒力打磨控制技术研究[D]. 南京:南京航空航天大学,2019. [8] Kosler H,Pavlovčič U,Jezeršek M,et al. Adaptive robotic deburring of die-cast parts with position and orientation measurements using a 3D laser-triangulation sensor[J]. Strojniški vestnik - Journal of Mechanical Engineering,2016,62(4):207-212. doi: 10.5545/sv-jme.2015.3227 [9] Song H,Song J. Precision robotic deburring based on force control for arbitrarily shaped workpiece using CAD model matching[J]. International Journal of Precision Engineering and Manufacturing,2013,14(1):85-91. doi: 10.1007/s12541-013-0013-2 [10] Tian F J,Li Z G,Lv C,et al. Polishing pressure investigations of robot automatic polishing on curved surfaces[J]. The International Journal of Advanced Manufacturing Technology,2016,87(1-4):639-646. doi: 10.1007/s00170-016-8527-2 [11] Liao L,Xi F J,Liu K F. Adaptive control of pressure tracking for polishing process[J]. Journal of Manufacturing Science and Engineering,2010,132(1):165-174. [12] Nagata F,Hase T,Haga Z,et al. CAD/CAM-based position/force controller for a mold polishing robot[J]. Mechatronics,2007,17(4-5):207-216. doi: 10.1016/j.mechatronics.2007.01.003 [13] 许家忠,郑学海,周洵. 复合材料打磨机器人的主动柔顺控制[J]. 电机与控制学报,2019,23(12):151-158. doi: 10.15938/j.emc.2019.12.019 [14] Dieste J A,Fernández A,Roba D,et al. Automatic grinding and polishing using spherical robot[J]. Procedia Engineering,2013,63:938-946. doi: 10.1016/j.proeng.2013.08.221 [15] 李沛隆. 基于改进PID的永磁同步电机转速控制系统研究[D]. 恩施:湖北民族大学,2022. [16] 张雷,周宛松,卢磊,等. 抛光力实时控制策略研究[J]. 东北大学学报:自然科学版,2015,36(6):853-857. [17] 张伟. 自整定PID控制算法的比较与研究[D]. 沈阳:沈阳理工大学,2020. [18] 李孜伟. 工业过程的二自由度PID控制算法研究[D]. 杭州:杭州电子科技大学,2019. [19] 陈静. 基于策略梯度优化的深度强化学习及其在智能体控制中的应用[D]. 广州:广东技术师范大学,2022. [20] 孙传禹. 基于深度强化学习的机器人轨迹规划方法研究[D]. 北京:北京建筑大学,2022. [21] 姜鱇祝. 基于DDPG算法的无人驾驶决策算法研究[D]. 哈尔滨:哈尔滨工业大学,2021. [22] 孔松涛,刘池池,史勇,等. 深度强化学习在智能制造中的应用展望综述[J]. 计算机工程与应用,2021,57(2):49-59. doi: 10.3778/j.issn.1002-8331.2008-0431 [23] Orr J,Dutta A. Multi-agent deep reinforcement learning for multi-robot applications:A survey[J]. Sensors,2023,23(7):3625. doi: 10.3390/s23073625 [24] 张宁. 基于改进DDPG算法的机器人路径规划研究[D]. 淮南:安徽理工大学,2021. -

 下载:
下载:

 点击查看大图
点击查看大图

图(11) / 表(1)
计量
- 文章访问数: 86
- HTML全文浏览量: 7
- PDF下载量: 28
- 被引次数: 0


