

Robotic compliance assembly system based on multidimensional admittance control
-
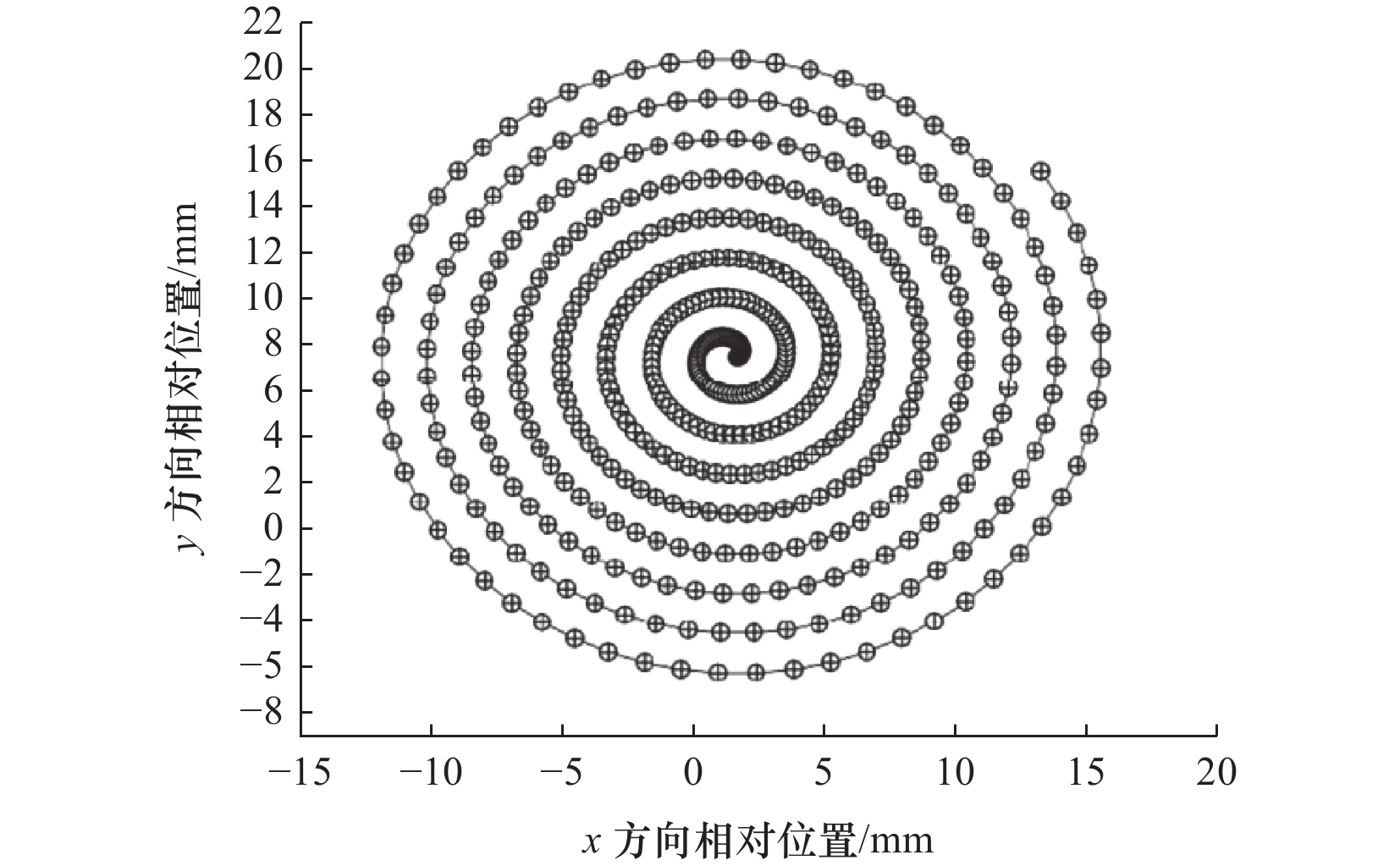
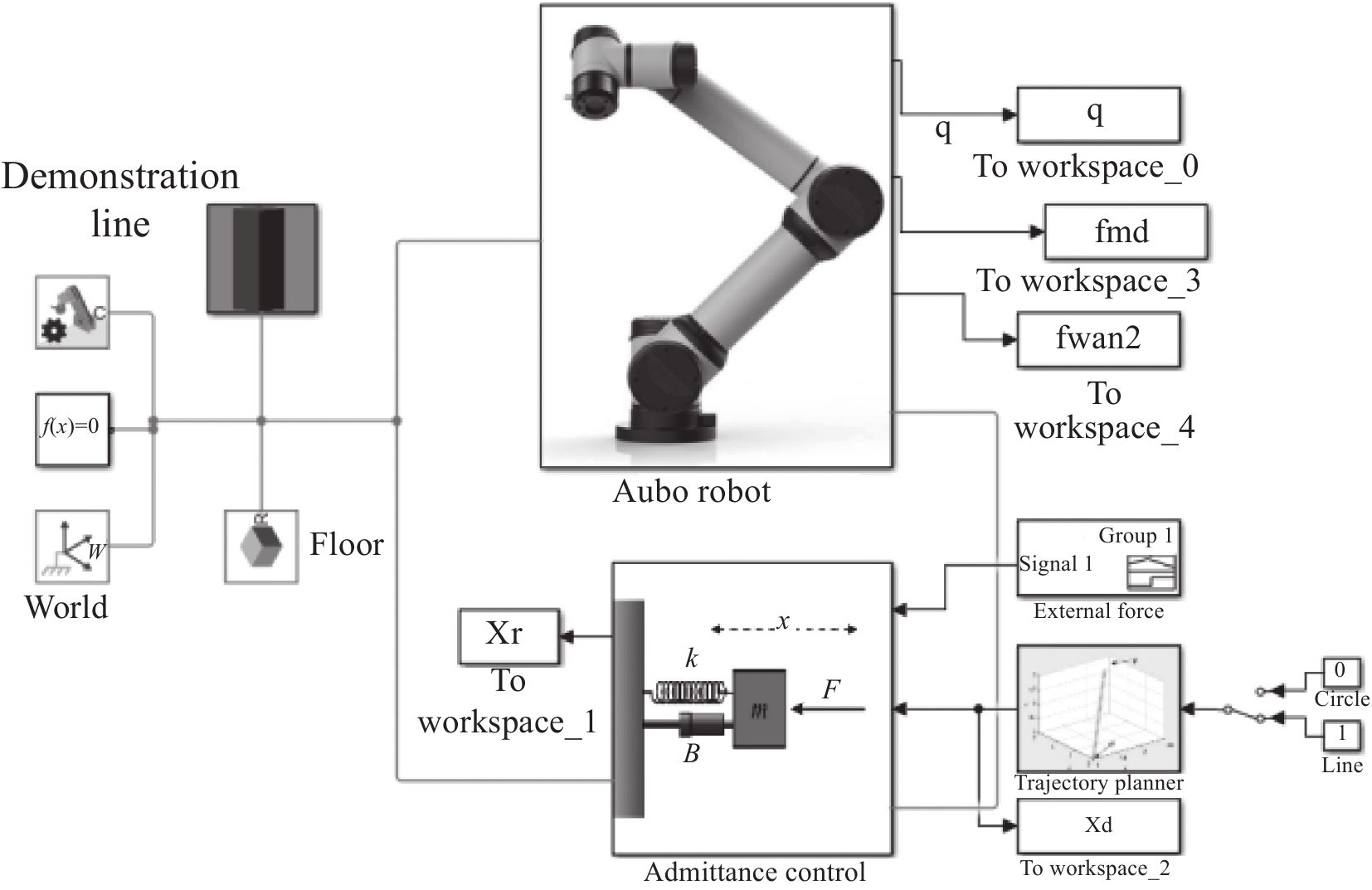
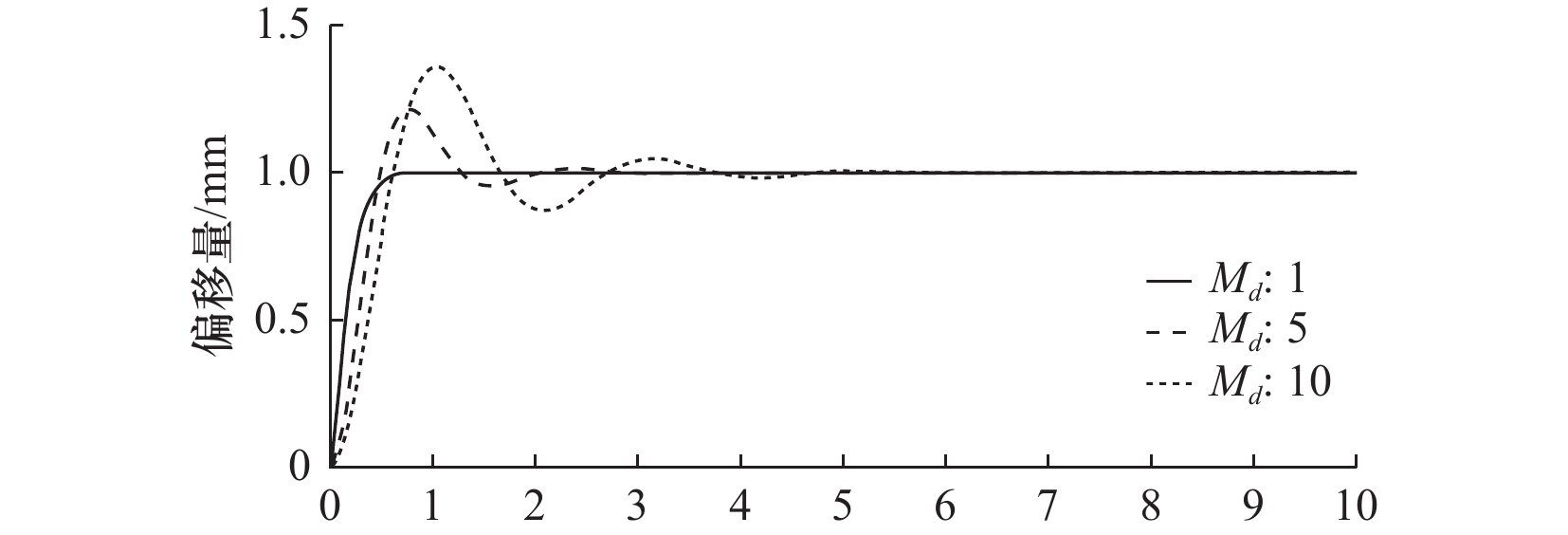
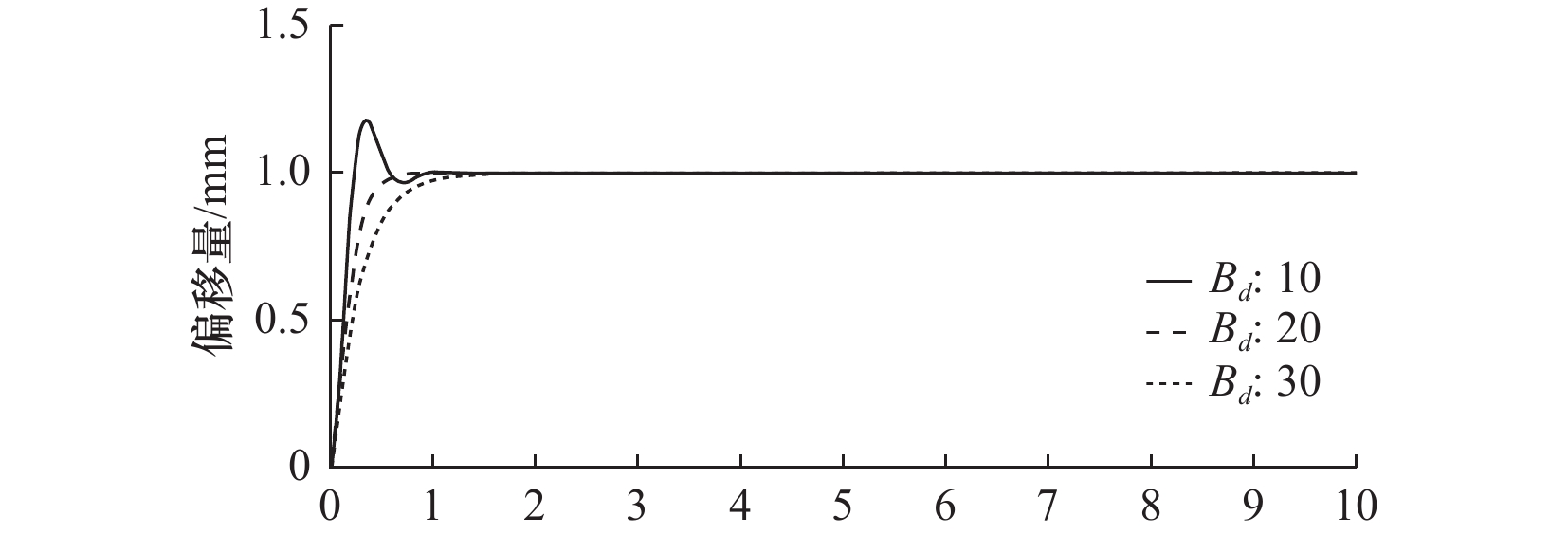
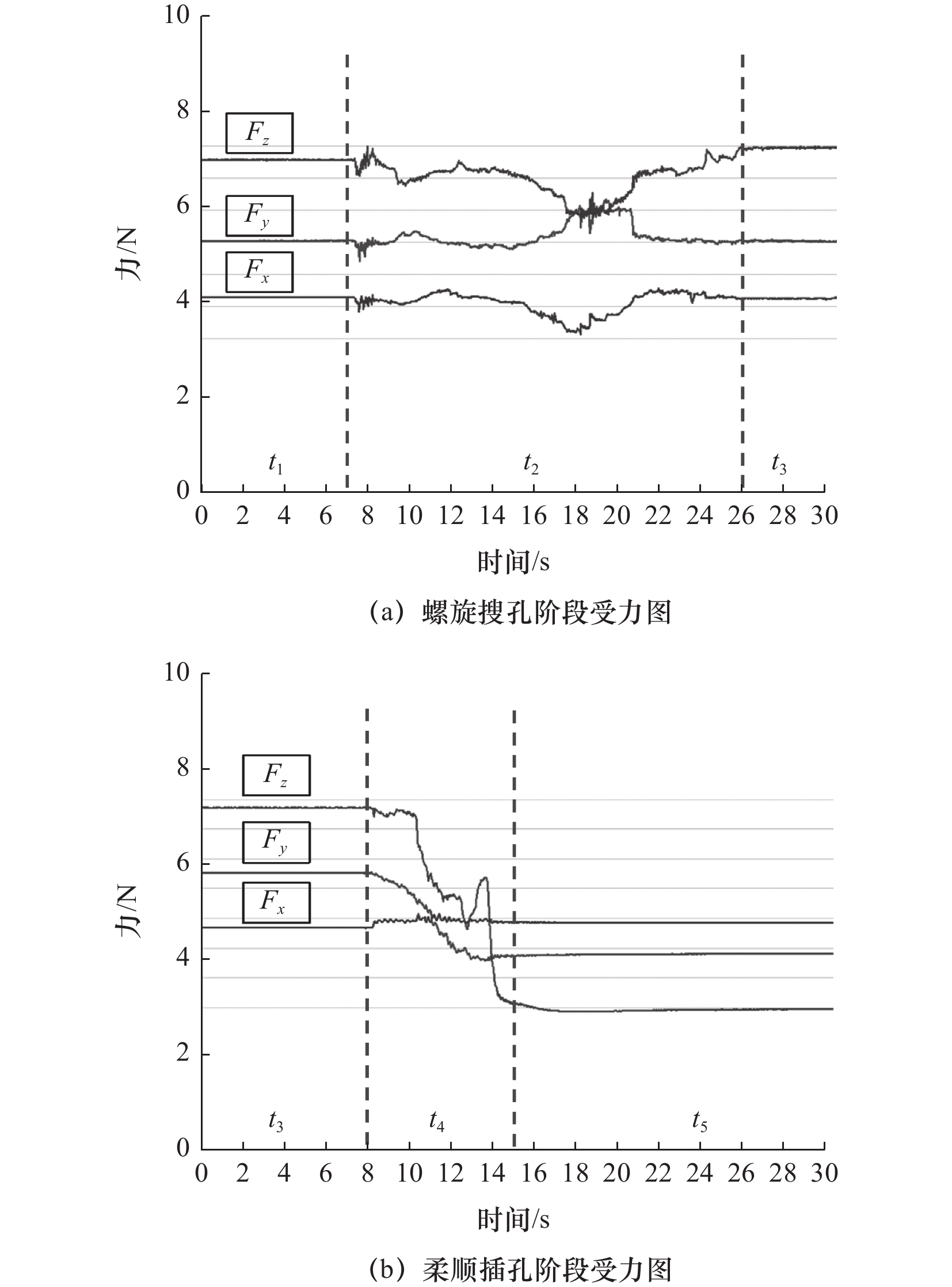
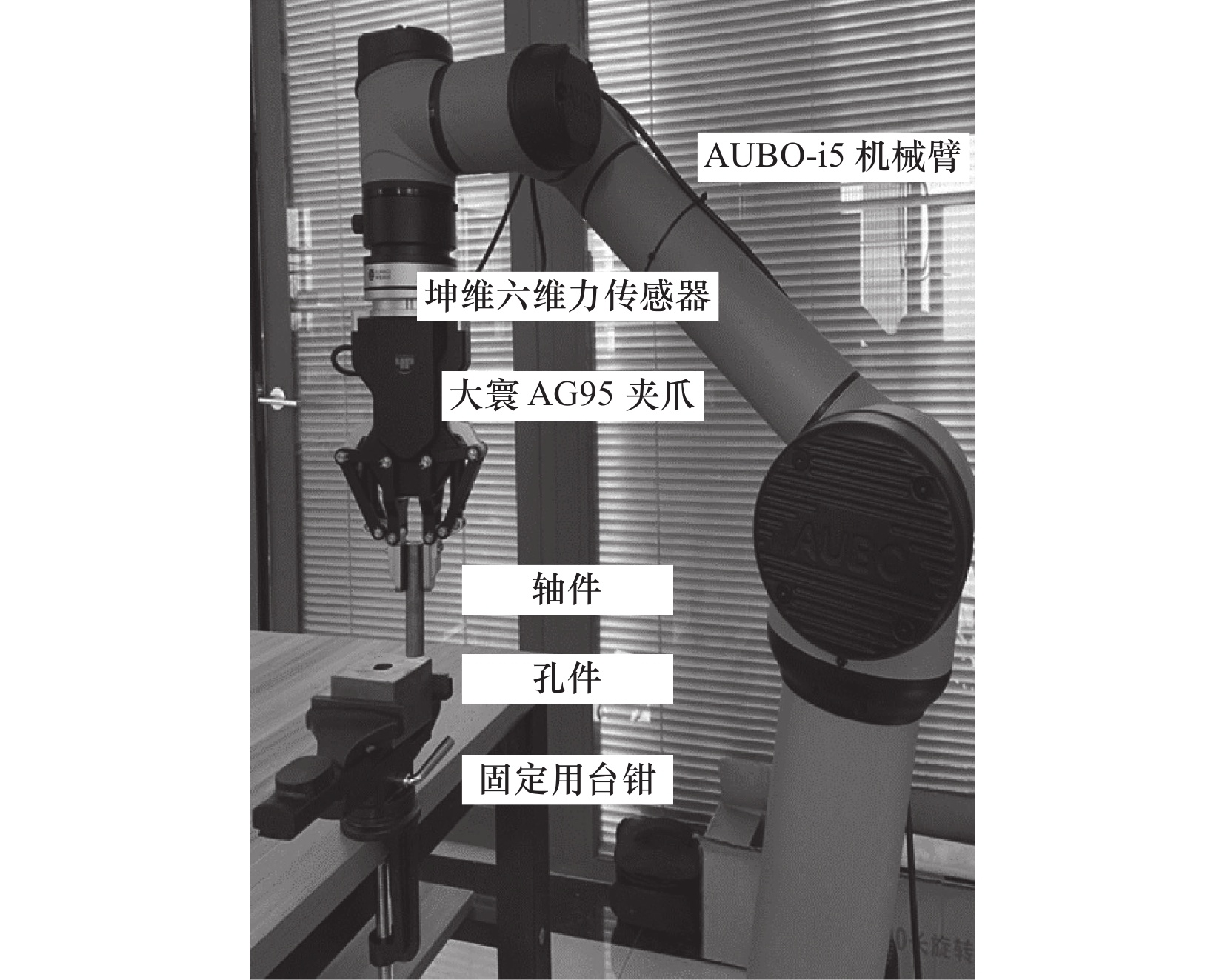
摘要: 针对轴孔装配过程中遇到卡阻或楔紧现象导致接触力过大损坏工件的问题,提出一种基于导纳力控 制的机器人柔性装配系统。将轴孔装配过程为搜孔阶段和调整插入阶段。首先,搜孔阶段提出一种基于阿基米德螺旋线的搜孔策略。其次,调整插入阶段提出一种基于等效质量–阻尼–弹簧的多维方向的导纳力控制装配方法。最后,选取圆形轴孔开展实际装配实验,结果表明所提出的方法能够实现机器人柔顺插孔,达到了预期效果。Abstract: Aiming at the problem of excessive contact force and damage to the workpiece caused by jamming or wedge phenomenon encountered in the peg-in-hole assembly process, a robot flexible assembly system based on admittance force control is proposed. The peg-in-hole assembly process is divided into the search phase and the adjustment insertion phase. Firstly, a search strategy based on Archimedes spiral is proposed in the search stage. Secondly, a admittance force control assembly method based on the multi-dimensional direction of equivalent mass-damping-spring is proposed in the adjustment insertion stage. Finally, the circular shaft hole is selected for the actual assembly experiment, and the results show that the proposed method can achieve the robot compliance jack and achieve the expected effect.
-
Key words:
- admittance control /
- flexible assembly /
- peg-in-hole assembly /
- spiral search
-
[1] 张翔,韩建海,李向攀,等. 轴孔装配作业机器人力控制系统设计[J]. 机械设计与制造,2019(12):63-66,70. doi: 10.3969/j.issn.1001-3997.2019.12.016 [2] Park H,Park J,Lee D H,et al. Compliance-based robotic peg-in-hole assembly strategy without force feedback[J]. IEEE Transactions on Industrial Electronics,2017,64(8):6299-6309. doi: 10.1109/TIE.2017.2682002 [3] Park H,Kim P K,Bae J H,et al. Dual arm peg-in-hole assembly with a programmed compliant system[C]. 2014 11th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI). IEEE,2014:431-433. [4] Song H C,Kim Y L,Song J B. Guidance algorithm for complex-shape peg-in-hole strategy based on geometrical information and force control[J]. Advanced Robotics,2016,30(8):552-563. doi: 10.1080/01691864.2015.1130172 [5] Roveda L,Pallucca G,Pedrocchi N,et al. Iterative learning procedure with reinforcement for high-accuracy force tracking in robotized tasks[J]. IEEE Transactions on Industrial Informatics,2018,14(4):1753-1763. doi: 10.1109/TII.2017.2748236 [6] Sharma K,Shirwalkar V,Pal P K. Intelligent and environment-independent Peg-In-Hole search strategies[C]. 2013 International Conference on Control,Automation,Robotics and Embedded Systems (CARE),2013:1-6. [7] 王森. 基于主被动柔顺的机器人轴孔精密装配技术研究[D]. 苏州:苏州大学,2020. [8] 王通. 圆—长方形复合孔类零件的机器人装配理论与方法研究[D]. 哈尔滨:哈尔滨工业大学,2019. [9] 刘鹏. 机器人轴孔精密装配策略与柔顺控制研究[D]. 襄阳:湖北文理学院,2023. [10] 卢万玉. 基于柔顺控制的机器人轴孔装配技术研究[D]. 南宁:广西大学,2022. [11] 徐建明,马益普,胡松达. 基于力位混合控制的机器人充电枪装配寻孔算法[J]. 浙江工业大学学报,2022,50(1):18-25. doi: 10.3969/j.issn.1006-4303.2022.01.003 -

 下载:
下载:





 点击查看大图
点击查看大图
图(10)
计量
- 文章访问数: 73
- HTML全文浏览量: 23
- PDF下载量: 10
- 被引次数: 0


