

Simulink-based study on visualized loading of robotic arms
-
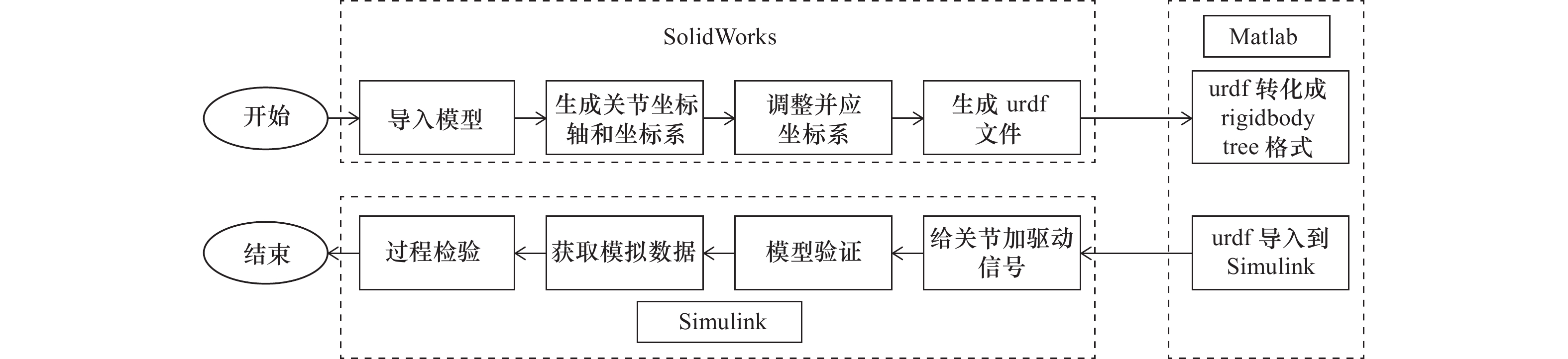
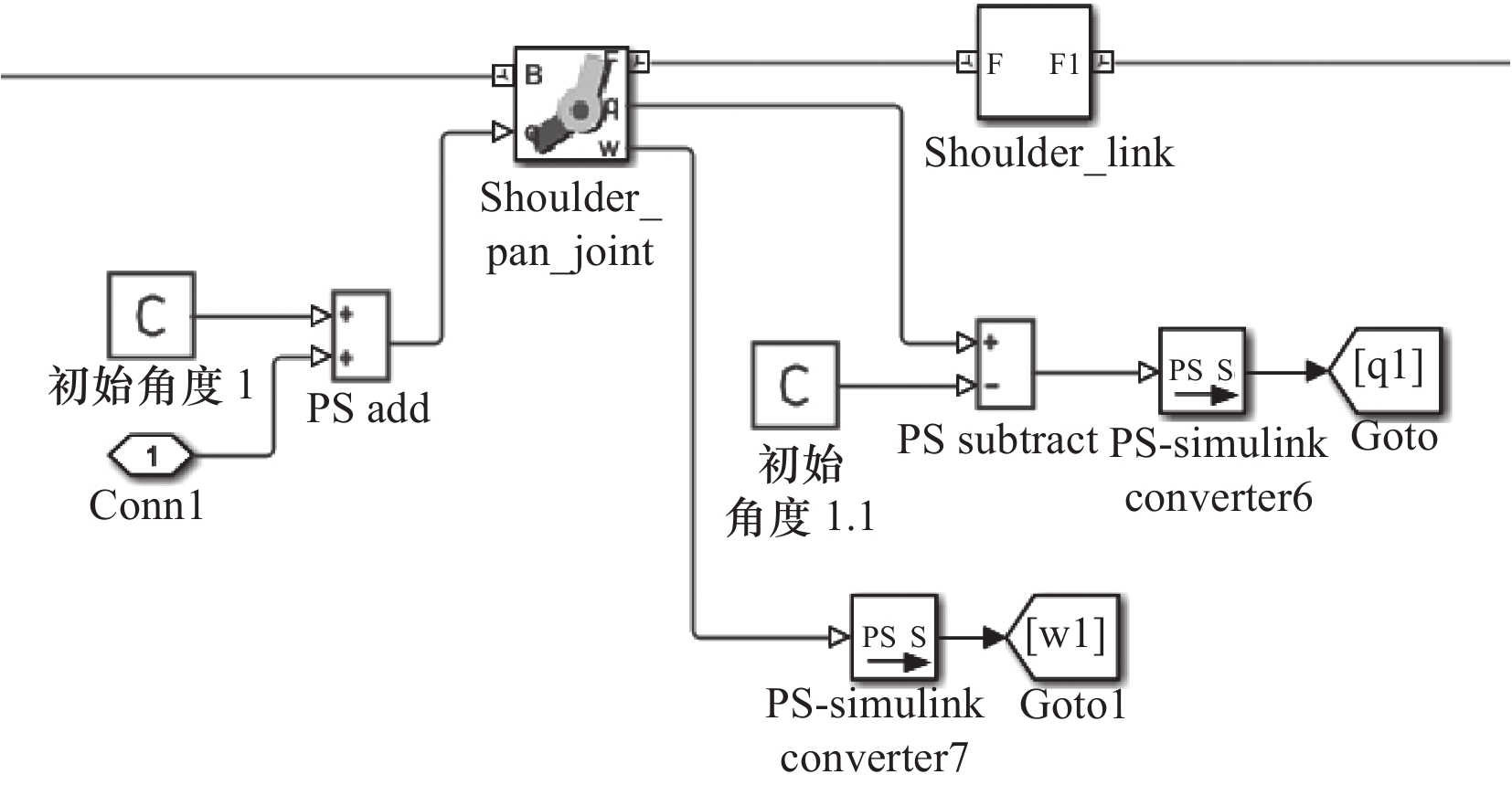
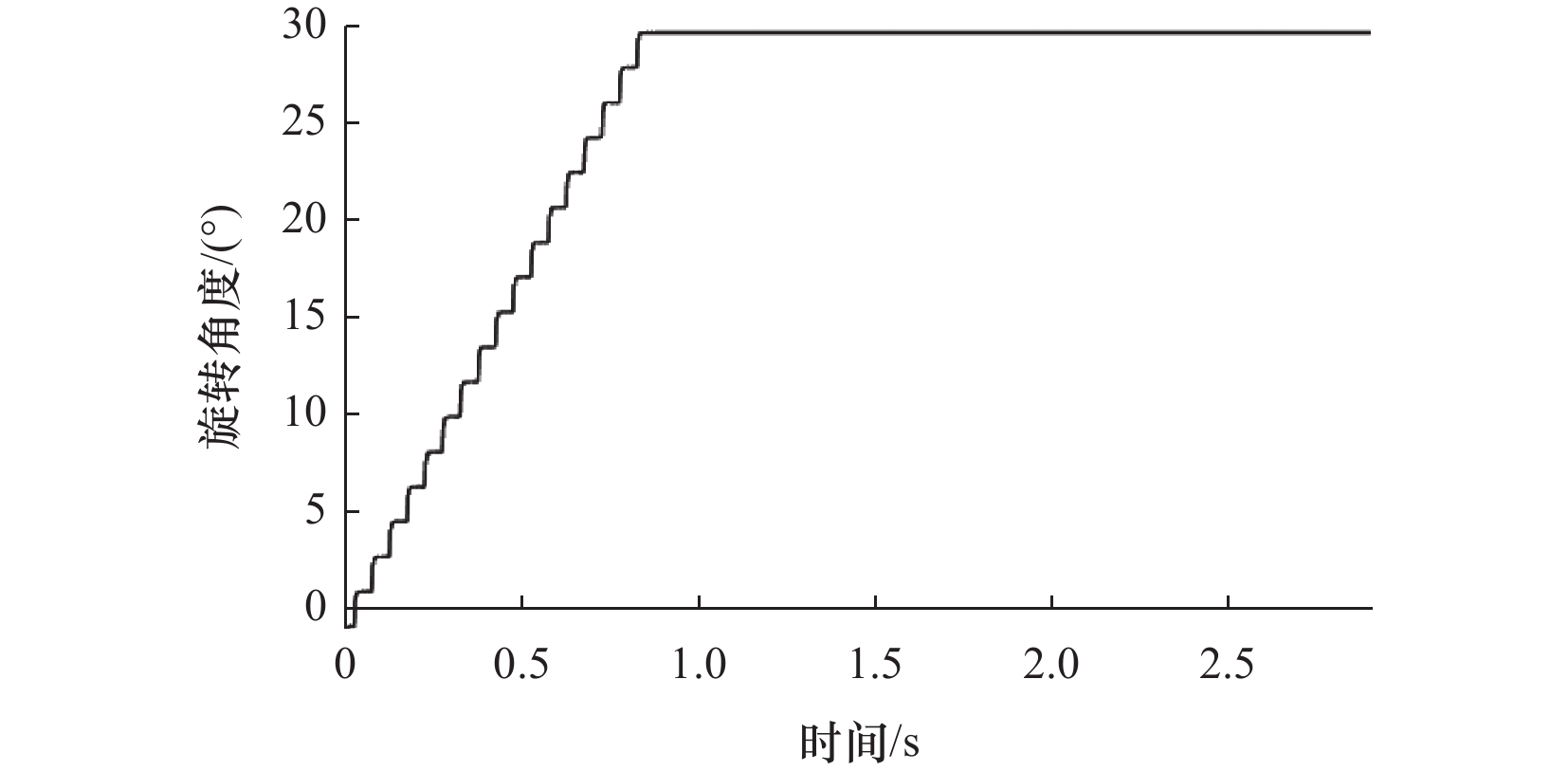
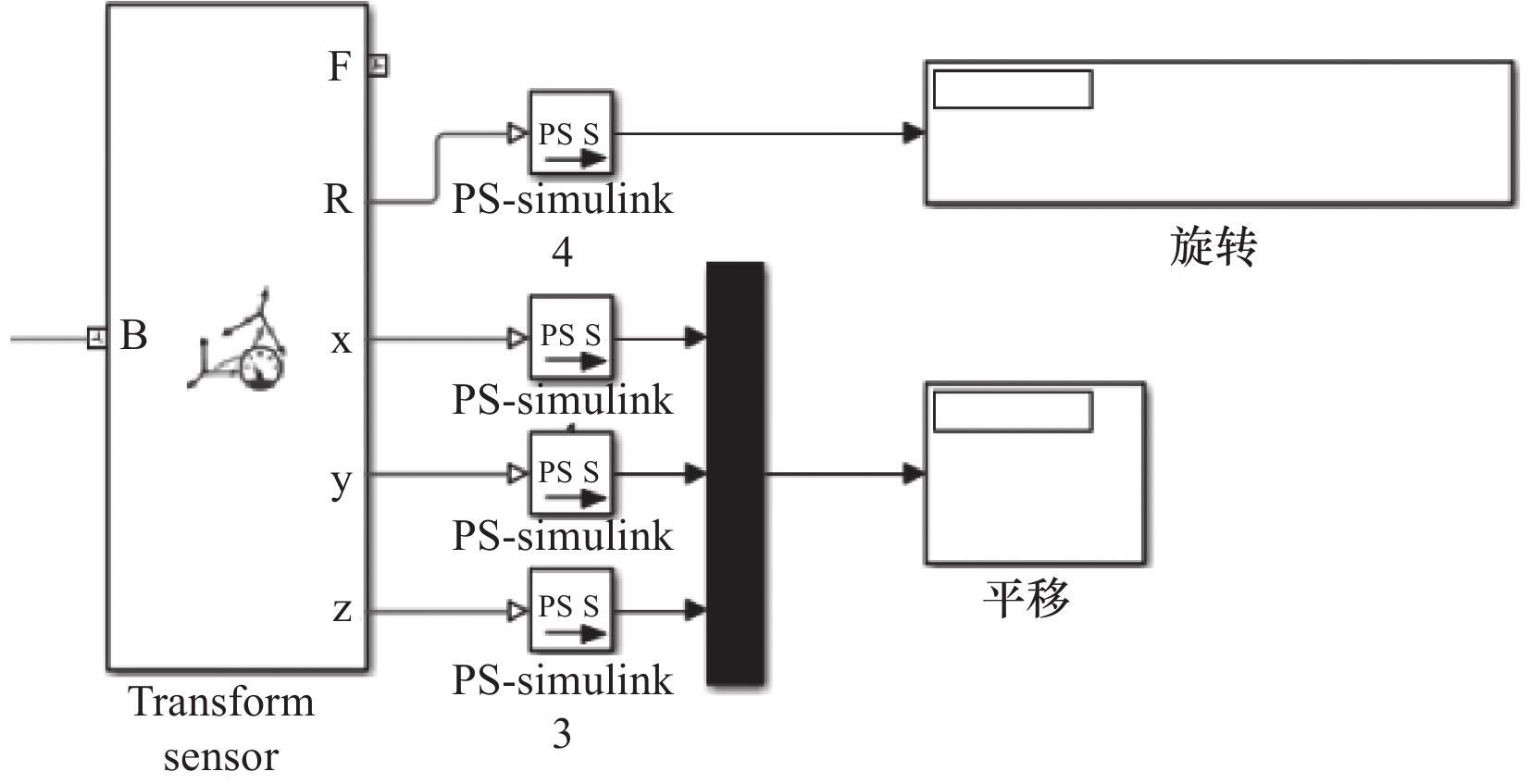
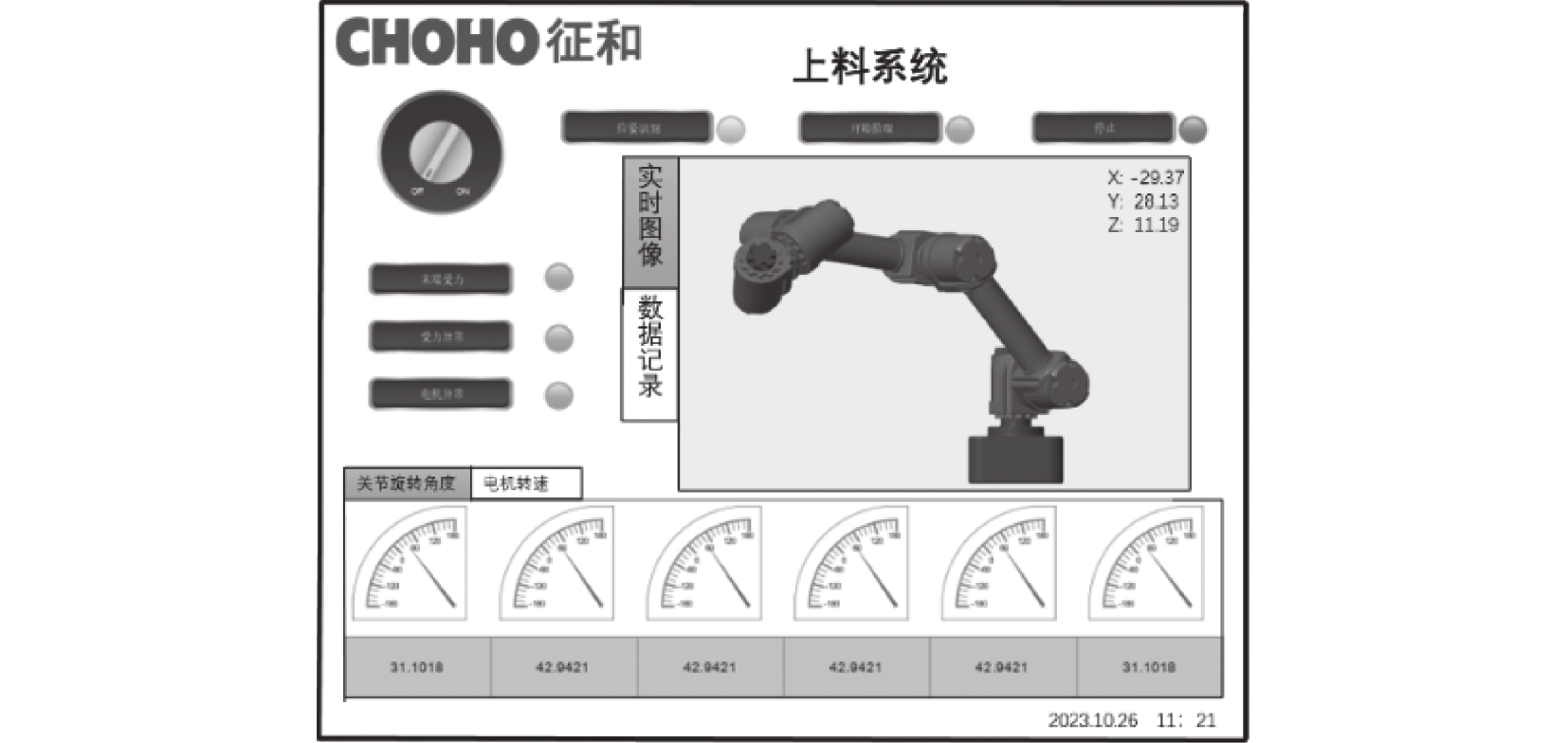
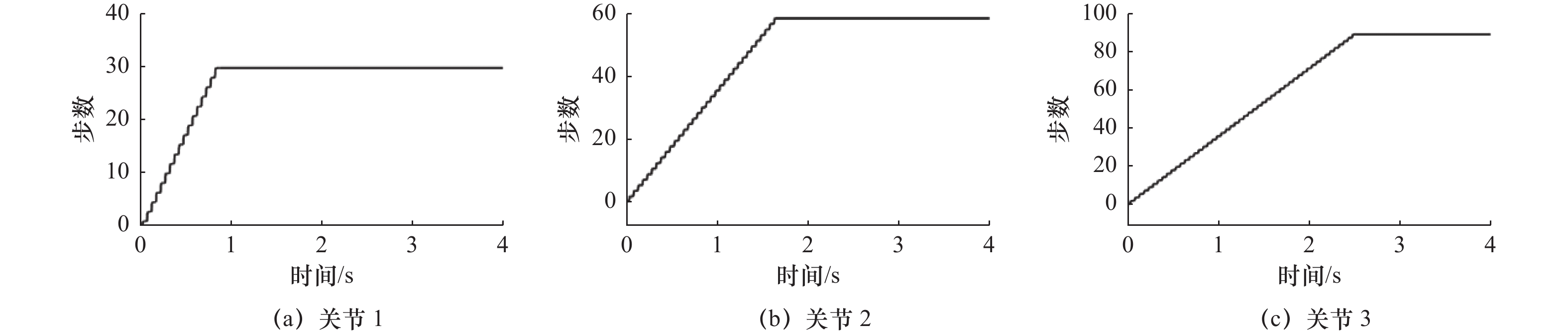
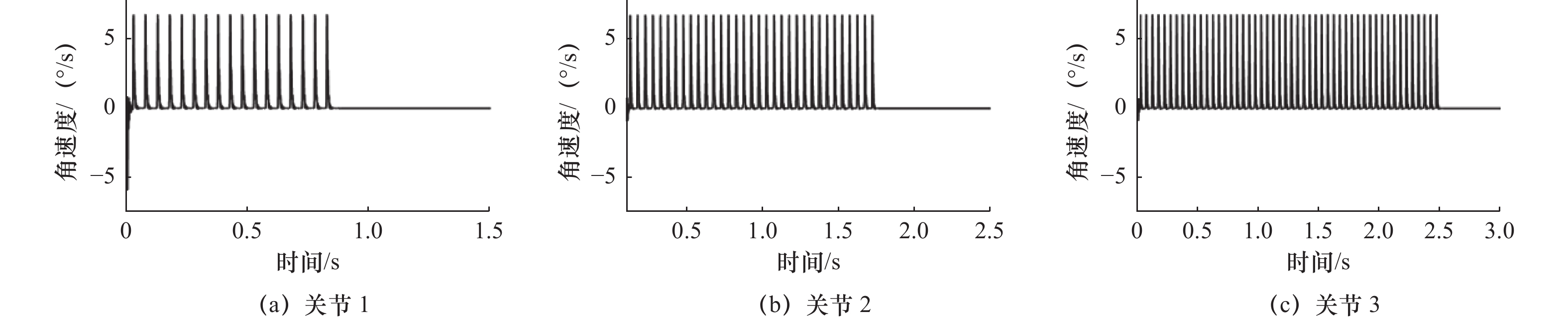
摘要: 自动上料设备可以通过现代化技术实现数据采集和分析,以优化制造流程,提高生产效率和产品质量,从而更好地实现智能制造。为了实现链板等零件的自动上料过程,文章介绍了机械臂的三维可视化人机交互平台模型的构建过程,以Gluon机械臂为分析对象,进行正运动学分析和逆运动学验证,并通过Simulink搭建了控制系统模型,实现了对Gluon机械臂的联合仿真。仿真过程中,对各关节的旋转角度、角速度以及末端执行器的齐次变换矩阵实时显示。通过验证,为后期搭建实物平台提供了可行性支撑,为进一步优化和完善系统功能奠定了基础。Abstract: Automatic loading equipment can realize data acquisition and analysis through modern technology to optimize the manufacturing process, improve production efficiency and product quality, so as to better realize intelligent manufacturing. In order to realize the automatic loading process of chain plates and other parts, this paper introduces the construction process of the three-dimensional visual human-computer interaction platform model of the robotic arm, takes the Gluon robotic arm as the object of analysis, carries out the positive kinematics analysis and the inverse kinematics validation, and builds the control system model through Simulink, realizing the joint simulation of the Gluon robotic arm. During the simulation process, the rotation angle and angular velocity of each joint and the chi-square transformation matrix of the end-effector are displayed in real time. Through the verification, the feasibility support is provided for the later construction of the physical platform, which lays the foundation for further optimization and improvement of the system functions.
-
Key words:
- automatic loading /
- real-time visualization /
- kinematic simulation /
- Simulink
-
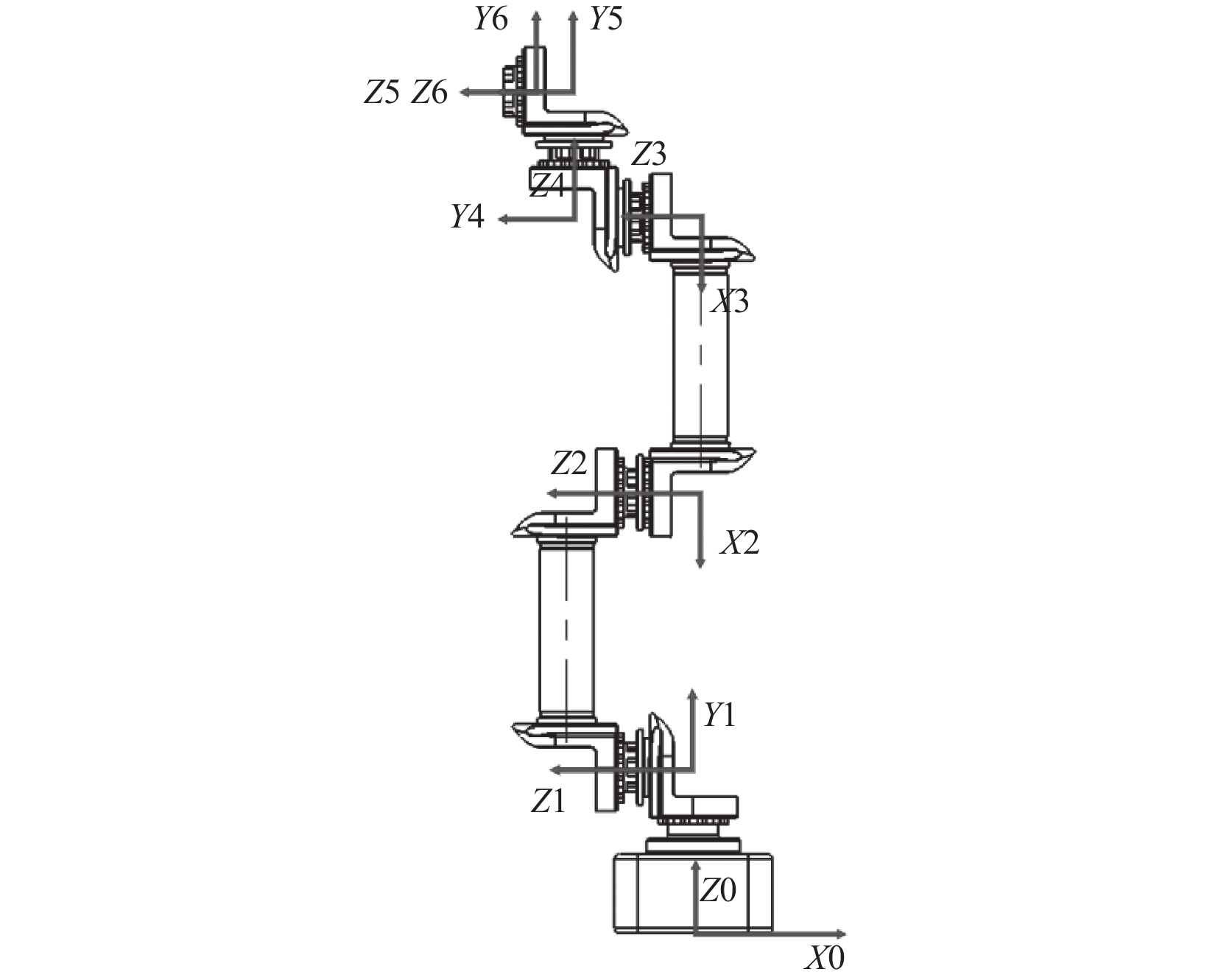
表 1 Gluon机械臂H-D参数表
杆件i $ {\alpha _{{{i - 1}}}} $/(°) $ {a_{i - 1}} $/mm $ {d_{{i}}} $/mm $ {\theta _i} $/(°) 1 90 0 105.03 $ {\theta _1} $ 2 0 −174.42 0 $ {\theta _2} - 90 $ 3 0 −174.42 0 $ {\theta _3} $ 4 90 0 75.66 $ {\theta _4} - 90 $ 5 −90 0 80.09 $ {\theta _5} $ 6 0 0 44.36 $ {\theta _6} $  下载: 导出CSV
下载: 导出CSV
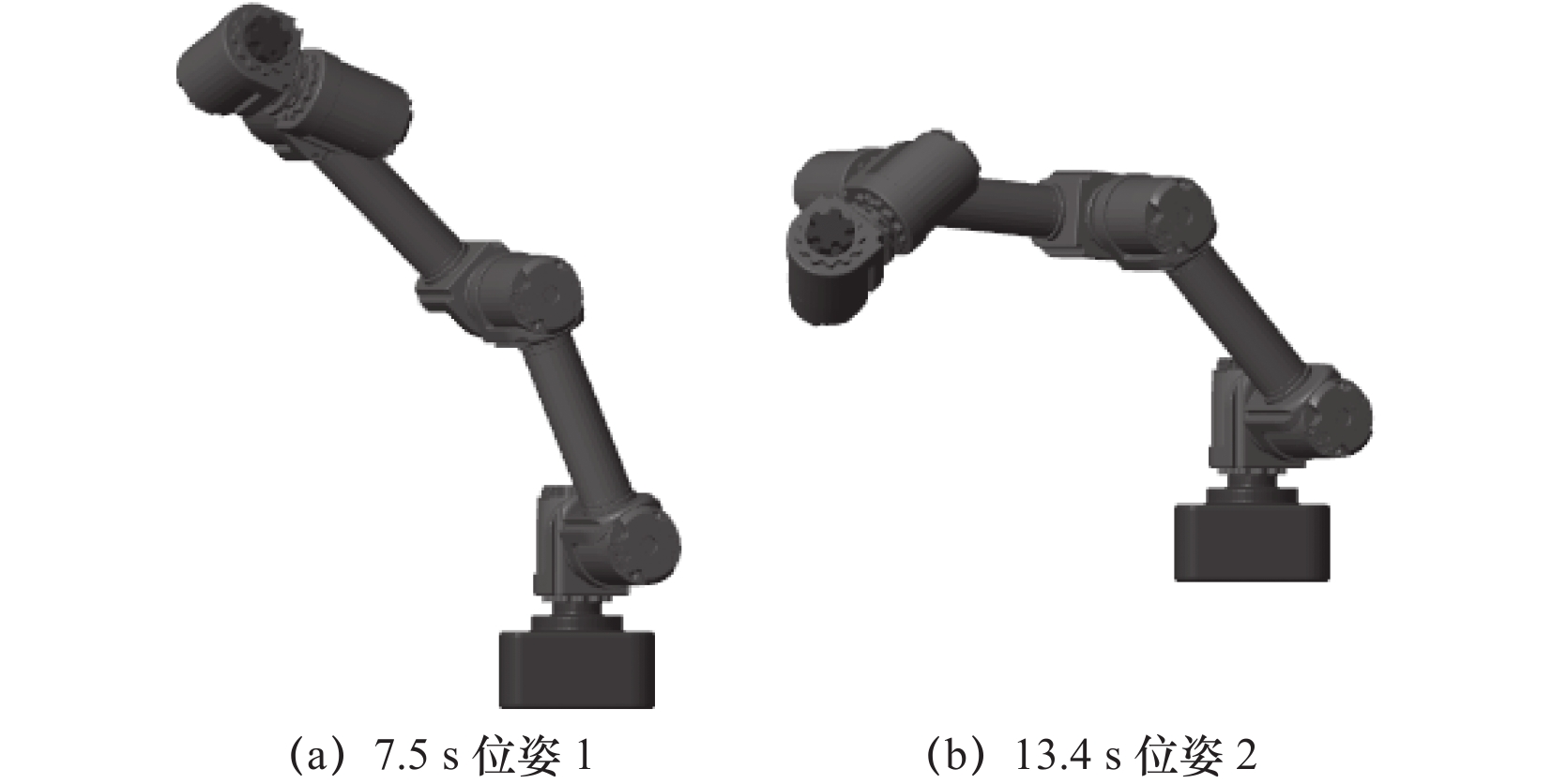
表 2 模型位姿矩阵参数
位姿1 位姿2
旋转$ \left[ {\begin{array}{*{20}{c}} {{{22}}{{.37}}}&-{{{ 72}}{{.5}}}&{{{65}}{{.14}}} \\ -{{{ 96}}{{.34}}}&-{{{ 6}}{{.31}}}&{{{26}}{{.05}}} \\ -{{{ 14}}{{.77}}}&-{{{ 68}}{{.58}}}&-{{{ 71}}{{.26}}} \end{array}} \right] $ $ \left[ {\begin{array}{*{20}{c}} {{{96}}{{.89}}}&-{{{ 12}}{{.04}}}&-{{{ 21}}{{.63}}} \\ {{{24}}{{.71}}}&{{{52}}{{.48}}}&{{{81}}{{.46}}} \\ {{{1}}{{.54}}}&-{{{ 84}}{{.27}}}&{{{53}}{{.82}}} \end{array}} \right] $
平移$ \left[ {\begin{array}{*{20}{c}} {{{12}}{{.13}}} \\ {{{18}}{{.3}}} \\ {{{2}}{{.66}}} \end{array}} \right] $ $ \left[ {\begin{array}{*{20}{c}} {{{27}}{{.03}}} \\ {{{27}}{{.9}}} \\ -{{{ 22}}{{.63}}} \end{array}} \right] $
下载: 导出CSV
-
[1] 徐跃宏. 浅谈汽车行业工位器具标准化设计与应用[J]. 汽车工艺与材料,2022(12):29-36. [2] 曹斌,秦磊,汪军. 采用关节机器人的齿轮机床自动上料对齿方法的研究[J]. 机械设计与制造,2013(3):63-65. [3] 金燕,刘少军. 圆盘类零件加工自动上下料系统设计[J]. 机床与液压,2018,46(16):41-44. [4] 靳江艳,庞彩珠,方忆湘,等. 基于数字孪生的飞机型架可视化装配工艺设计[J]. 航空制造技术,2023,66(1):92-106. [5] 李永泉,张立杰,郭志民,等. 基于 DH 矩阵的球面 5R 并联机构误差建模及灵敏度分析[J]. 中国机械工程,2012,23(12):1470-1474. [6] 黄昔光,刘聪聪,黄旭,等. 空间连杆机构位移分析的共形几何代数方法[J]. 机械工程学报,2021,57(9):39-50. [7] 李昂,杨泓渊,雷小萌,等. 基于等效连杆模型的六足机器人行进姿态闭环控制[J]. 吉林大学学报 :工学版,2022,52(7):1696-1708. [8] 东辉,杜志江. 基于工作空间密度函数的平面冗余机器人的逆运动学求解算法[J]. 机械工程学报,2015,51(17):8-14. [9] 王战中,杨长建,刘超颖,等. MATLAB 环境下六自由度焊接机器人运动学逆解及优化[J]. 机械设计与制造,2013(7):182-184. doi: 10.3969/j.issn.1001-3997.2013.07.058 -

 下载:
下载:


 点击查看大图
点击查看大图
图(11) / 表(2)
计量
- 文章访问数: 60
- HTML全文浏览量: 17
- PDF下载量: 13
- 被引次数: 0


