

Object recognition and grabbing detection based on deep learning
-
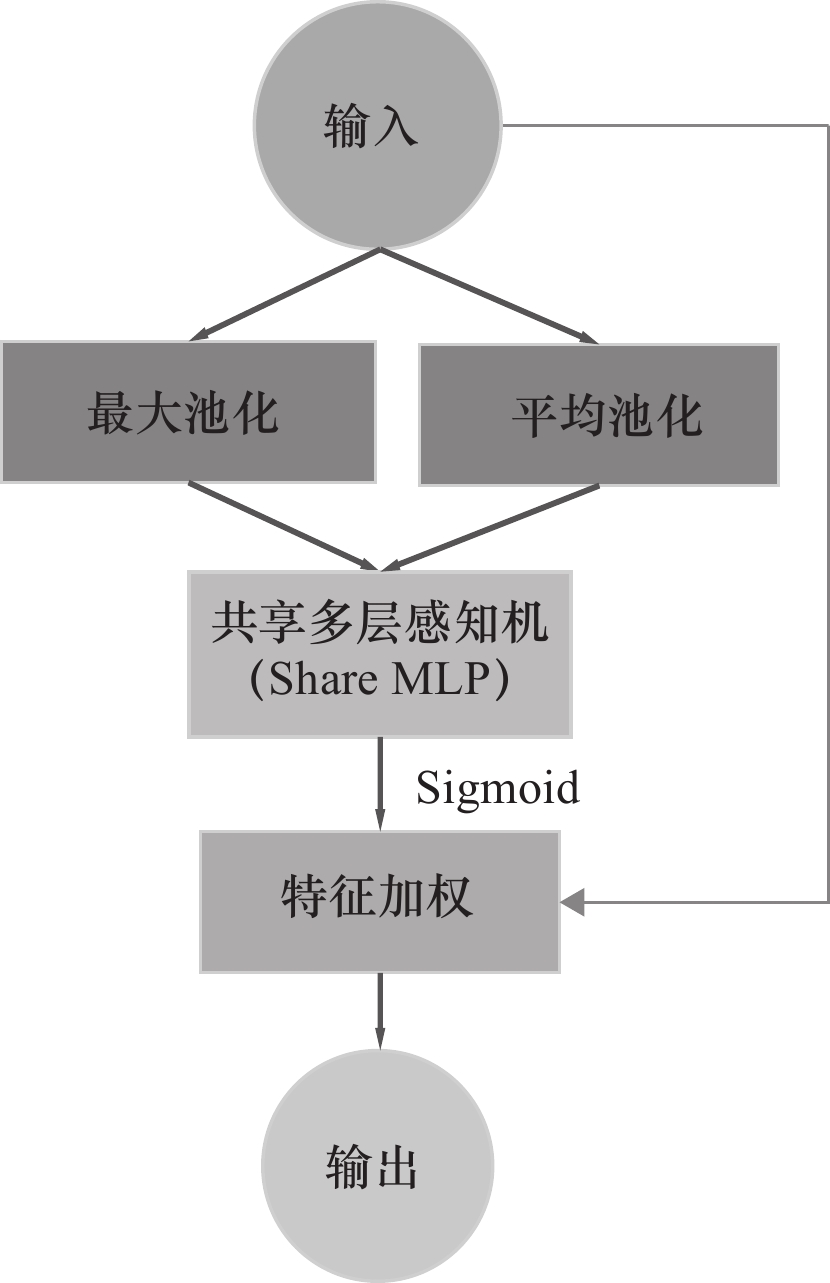
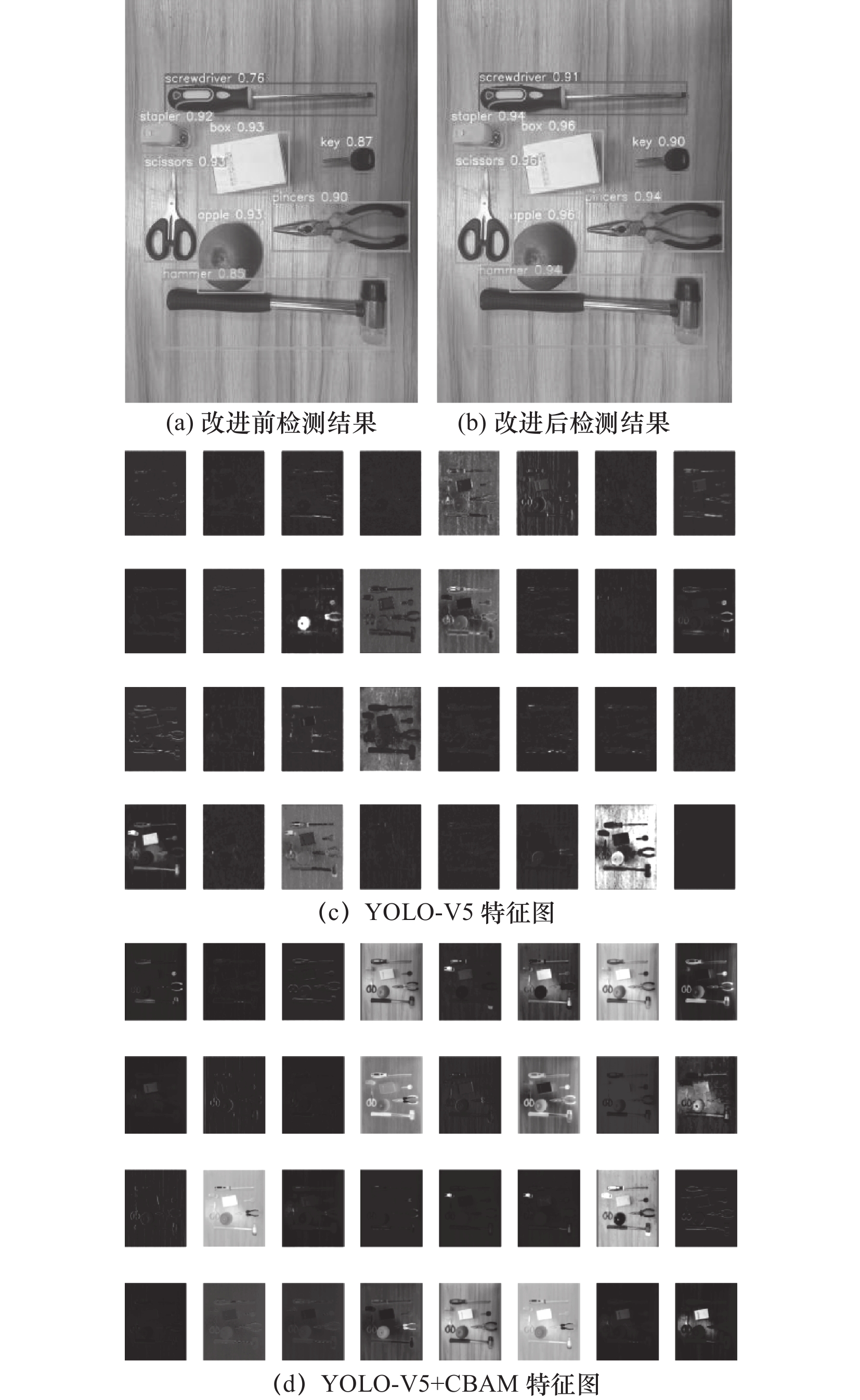
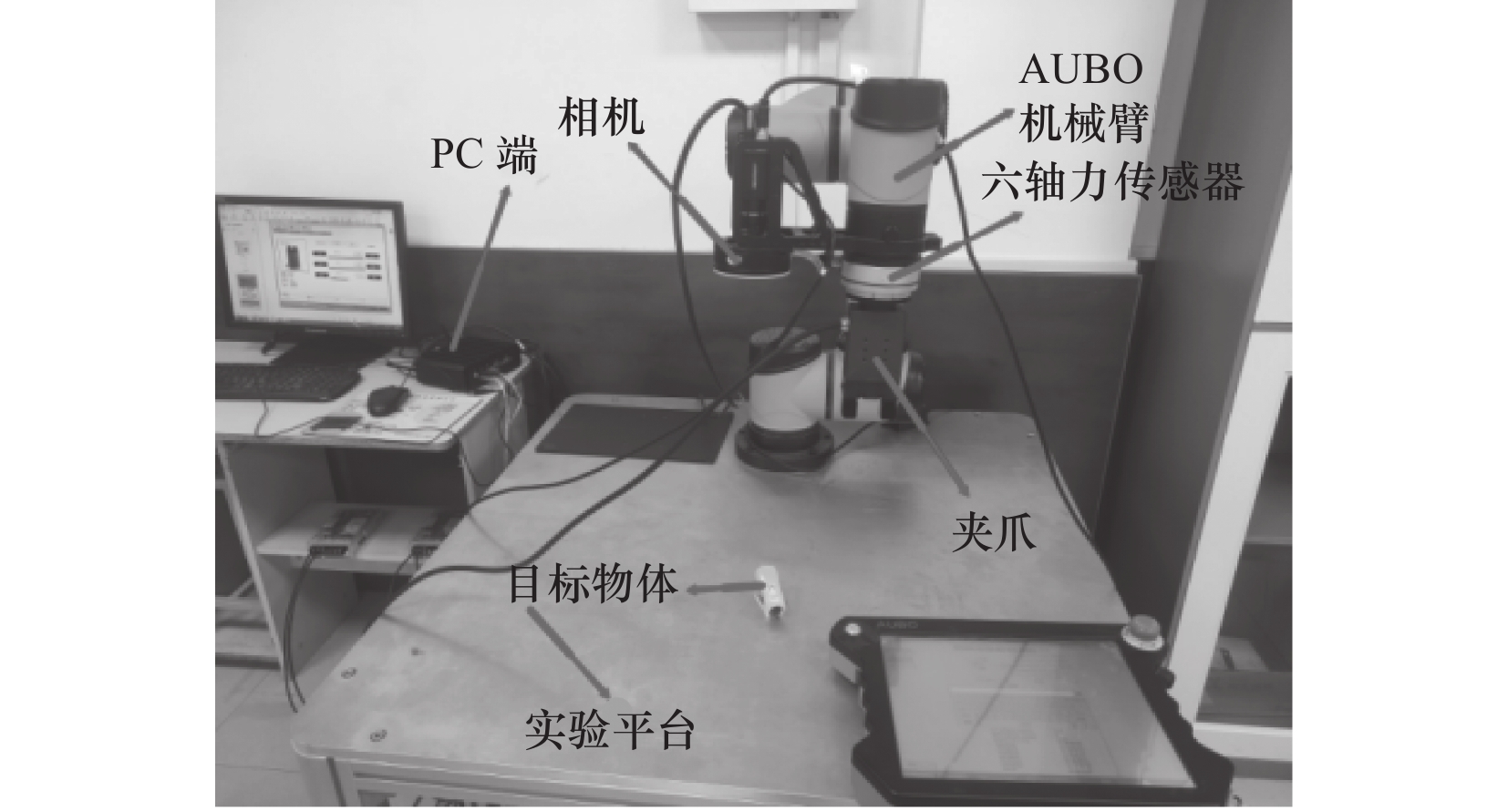
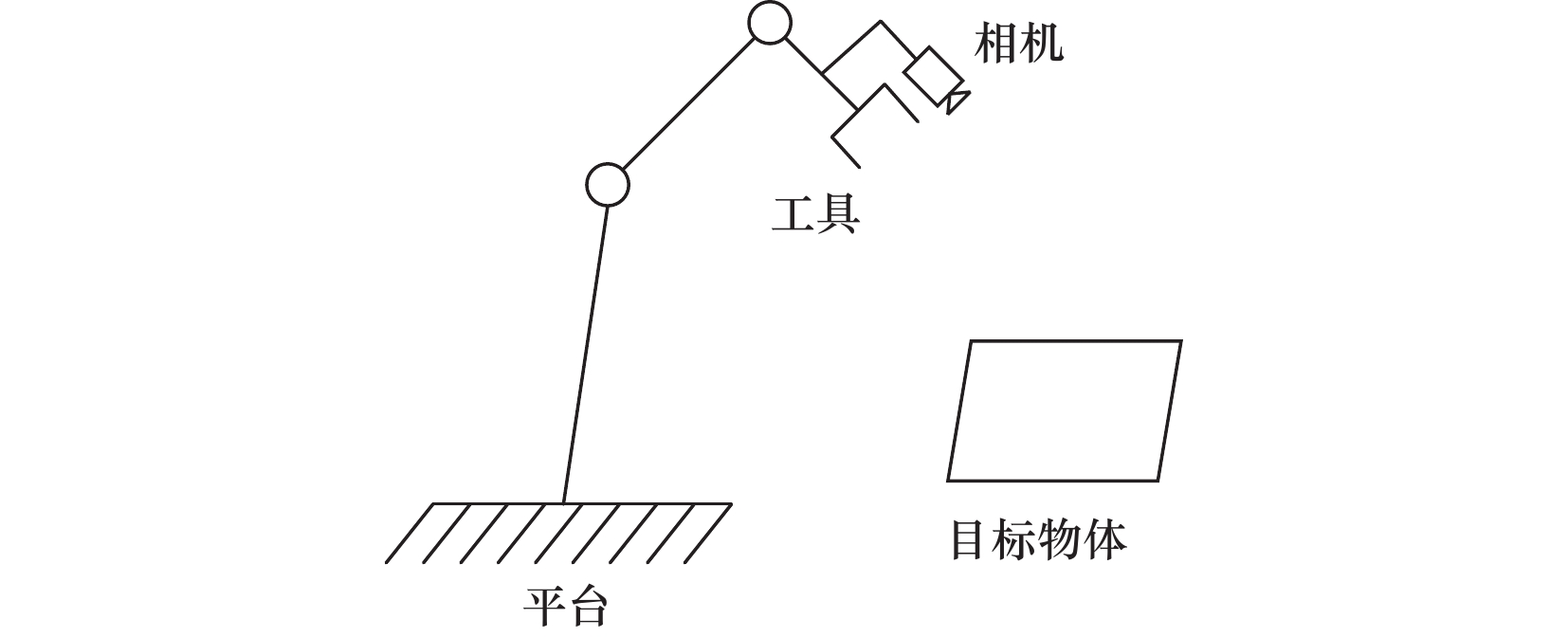
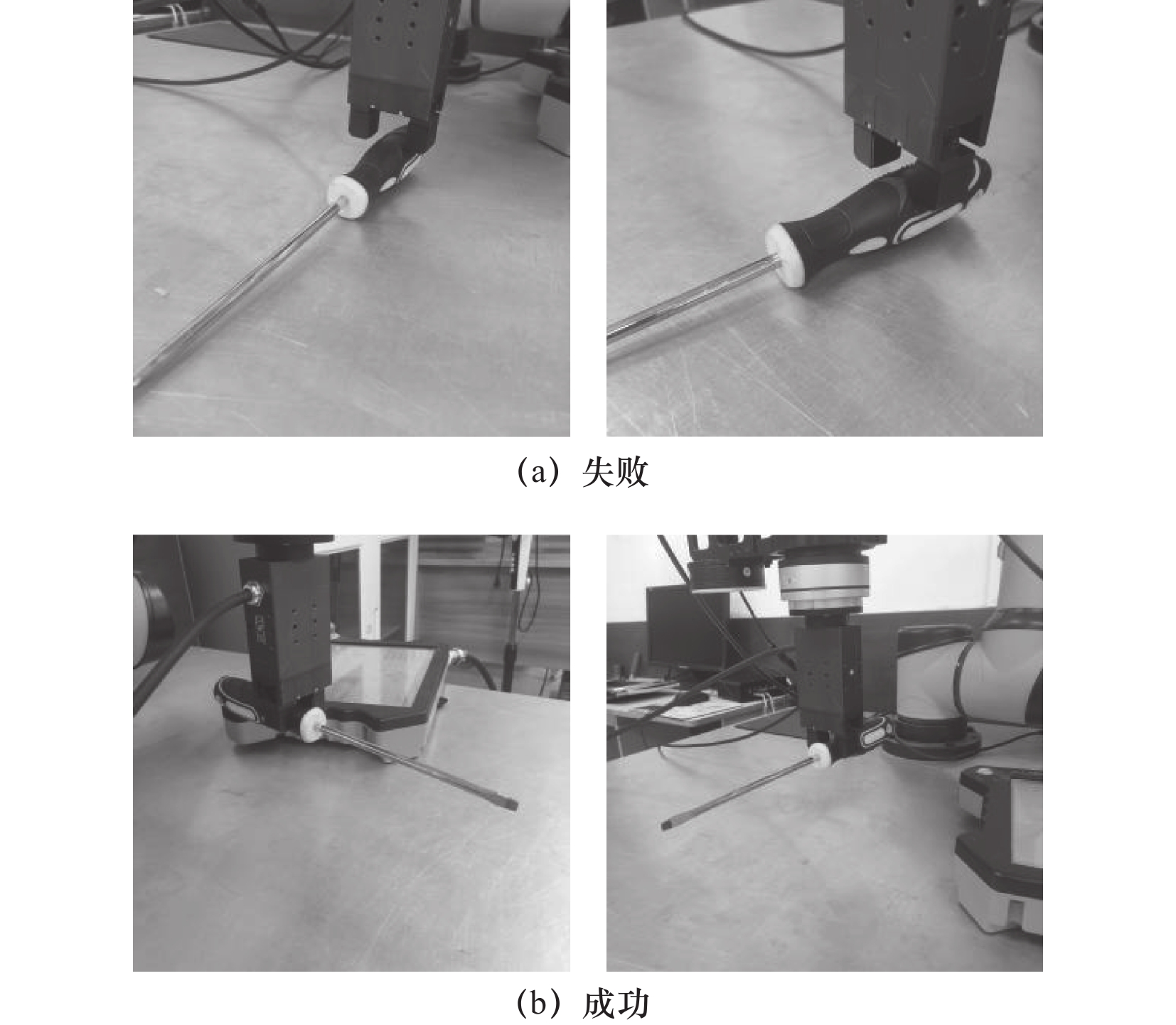
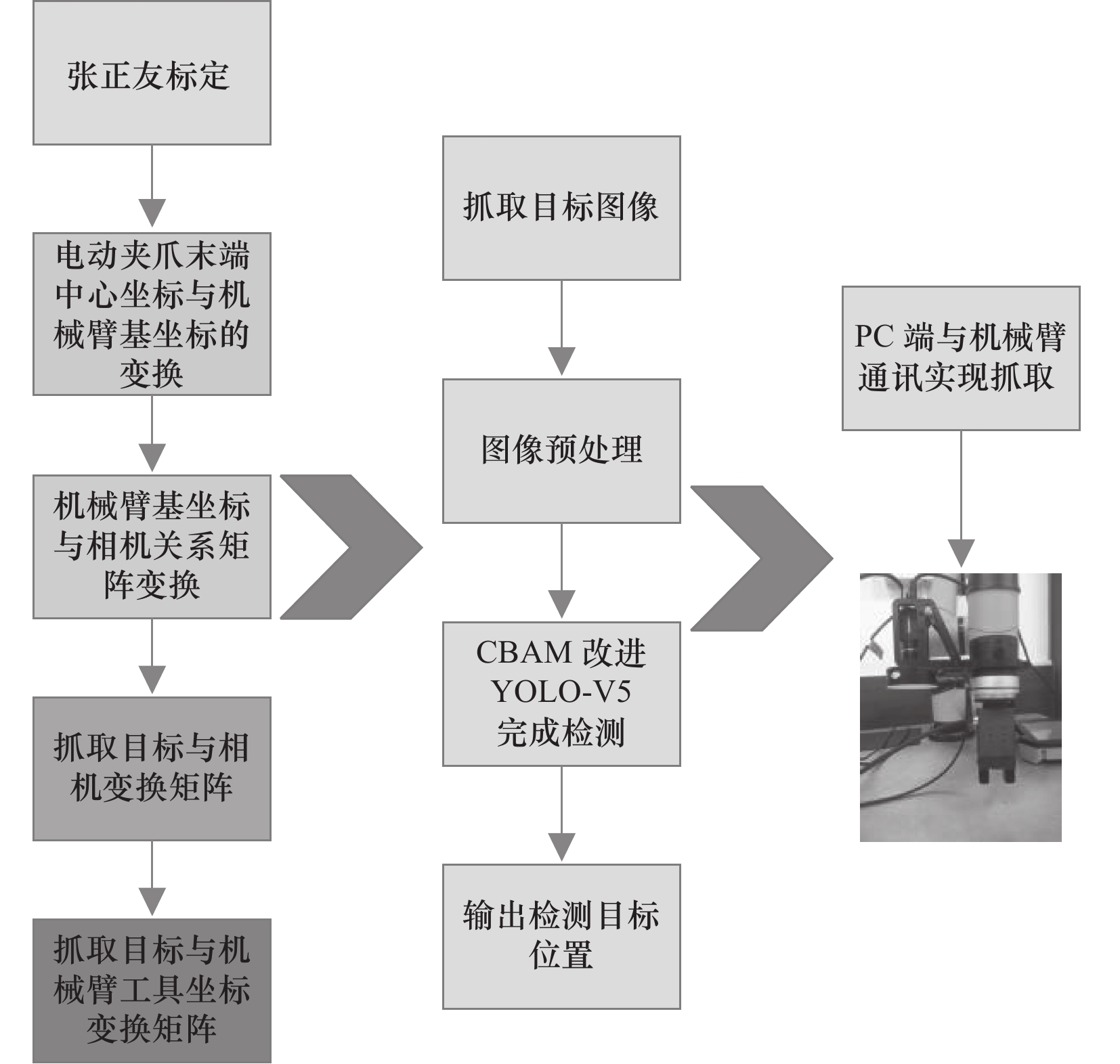
摘要: 针对机械臂抓取在工业生产中的复杂作业环境、不同零件之间存在干扰的问题,文章提出了一种基于深度学习的目标识别及抓取方法,以此来减少抓取场景中物体位置的不确定性,提 高检测和抓取成功率。采用卷积注意力机制模块(convolutional block attention module,CBAM)对YOLO-V5进行改进,加强卷积网络对图像特征的关注和提取能力,提高检测精度。改进之后的网络平均识别率提高了5.26%,证明了改进是有效且成功的。通过AUBO-i5机械臂、电动夹爪、相机以及六轴力传感器等设备搭建了一套机械臂抓取系统,实验结果表明所提出的方法在实际抓取中可以适应不同的抓取场景,减少外界干扰,提高抓取成功率,具有良好的应用前景。Abstract: Aiming at the problem of complex operating environment and interference between different parts in the industrial production of robotic arm grasping, this paper proposes a target recognition and grasping method based on deep learning, so as to reduce the uncertainty of object position in the grasping scene and improve the success rate of detection and grasping. The Convolutional Block Attention Module (CBAM) is used to improve YOLO-V5 to enhance the attention and extraction ability of convolutional networks on image features and improve the detection accuracy. The average recognition rate of the improved network increased by 5.26%, proving that the improvement was effective and successful. In this paper, a set of robotic arm grasping system is built by AUBO-i5 manipulator, electric gripper, camera, and six-axis force sensor, and the experimental results show that the proposed method can adapt to different grasping scenarios in real grasping, reduce external interference, improve the success rate of grasping, and have good application prospects.
-
Key words:
- YOLO-V5 /
- deep learning /
- robotic arm grabbing /
- object detection /
- CBAM
-
表 1 算法对比表
算法 mAP/(%) 速度 Lenz I等 93.7 13.5 s YOLO-V3 92.33 / YOLO-V3改 92.65 / Morrison D等 88 20 ms YOLO-V5 88.62 32 ms 本文 93.88 35 ms  下载: 导出CSV
下载: 导出CSV
表 2 实验抓取结果
抓取场景 光照
环境YOLO-V5 添加CBAM模块的
YOLO-V5检测准确
率/(%)抓取成功
率/(%)检测准确
率/(%)抓取成功
率/(%)无杂物干扰下
目标物体的识
别和抓取环境一 97.1 95.6 100 97.1 环境二 94.3 95.4 100 95.7 环境三 91.4 93.8 95.7 94.1 有杂物干扰下
目标物体的识
别的抓取环境一 95.7 94.1 97.1 94.1 环境二 90.0 92.1 94.3 92.4 环境三 85.7 88.3 90.0 90.4
下载: 导出CSV
-
[1] 刘晨晖,张为民,薛峰. 基于随机森林贝叶斯优化的机械臂运动参数优化研究[J]. 制造技术与机床,2023(1):83-90. [2] 禹鑫燚,黄睿,欧林林. 一种用于易损物体的机器人抓取姿态预测方法[J/OL]. 小型微型计算机系统:1-82023-10-11]. [3] 吕泽,蔡乐才,成奎,等. 基于角度估计机械臂抓取系统目标检测算法[J]. 四川轻化工大学学报:自然科学版,2023,36(2):46-56. [4] 姚俊英. 基于深度强化学习的机械臂技能操作方法研究[D]. 西安:西安电子科技大学,2022. [5] Lenz I,Lee H,Saxena A. Deep learning for detecting robotic grasps[J]. The International Journal of Robotics Research,2015,34(4-5):705-724. doi: 10.1177/0278364914549607 [6] Mallick A,Pobil D A P,Cervera E. Deep learning based object recognition for robot picking task[C]. Proceedings of the 12th International Conference on Ubiquitous Information Management and Communication,2018:1-9. [7] 孙先涛,程伟,陈文杰,等. 基于深度学习的视觉检测及抓取方法[J/OL]. 北京航空航天大学学报:1-132023-10-11]. [8] Anjum M U,Khan U S,Qureshi W S,et al. Vision-based hybrid detection for pick and place application in robotic manipulators[J]. 2023 International Conference on Robot-ics and Automation in Industry (ICRAI),2023:1-5. [9] Morrison D,Corke P,Leitner J. Learning robust,real-time,reactive robotic grasping[J]. The International Journal of Robotics Research,2020,39(2-3):183-201. doi: 10.1177/0278364919859066 [10] Zhang Z Y. Flexible camera calibration by viewing a plane from unknown orientations[J]. Proceedings of the Seventh IEEE International Conference on Computer Vision,1999:666-673. [11] Woo S,Park J,Lee J,et al. CBAM:convolutional block attention module[J]. Computer Vision and Pattern Recognition,2018:3-19. [12] Zhang N,Dongahue J,Girshick R,et al. Part-based R-CNNs for fine-grained category detection[J]. European Conference on Computer Vision,2014:834-849. [13] Girshick R. Fast R-CNN[C]. 2015 IEEE International Conference on Computer Vision (ICCV),2015:1440-1448. [14] Ren S ,He K ,Girshick R ,et al. Faster R-CNN:Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence,2017,39(6):1137-1149. [15] He K,Gkioxari G,Dollár P,et al. Mask R-CNN[C]. 2017 IEEE International Conference on Computer Vision (ICCV),2017:2980-2988. [16] Redmon J,Angelova A. Real-time grasp detection using convolutional neural networks[C]. 2015 IEEE International Conference on Robotics and Automation (ICRA),2015:1316-1322. [17] Kumra S,Kanan C. Robotic grasp detection using deep convolutional neural networks[C]. 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE,2017:769-776. [18] Simonyan K,Zisserman A.Very deep convolutional networks for large-scale imagerecognition[C]. Proceedings of the 3rd International Conference on Learning Representations. San Diego,CA,USA. 2014:1-5. -

 下载:
下载:






 点击查看大图
点击查看大图
图(13) / 表(2)
计量
- 文章访问数: 104
- HTML全文浏览量: 32
- PDF下载量: 16
- 被引次数: 0


