

Robot constant force grinding based on variable parameter impedance control
-
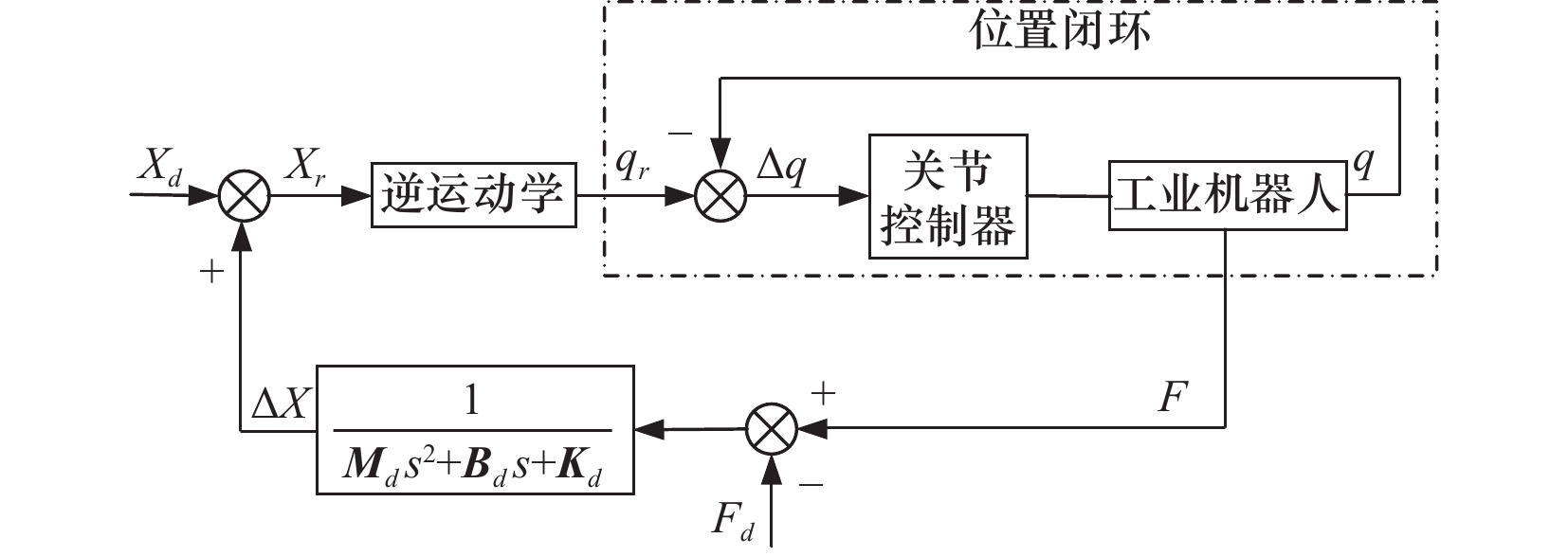
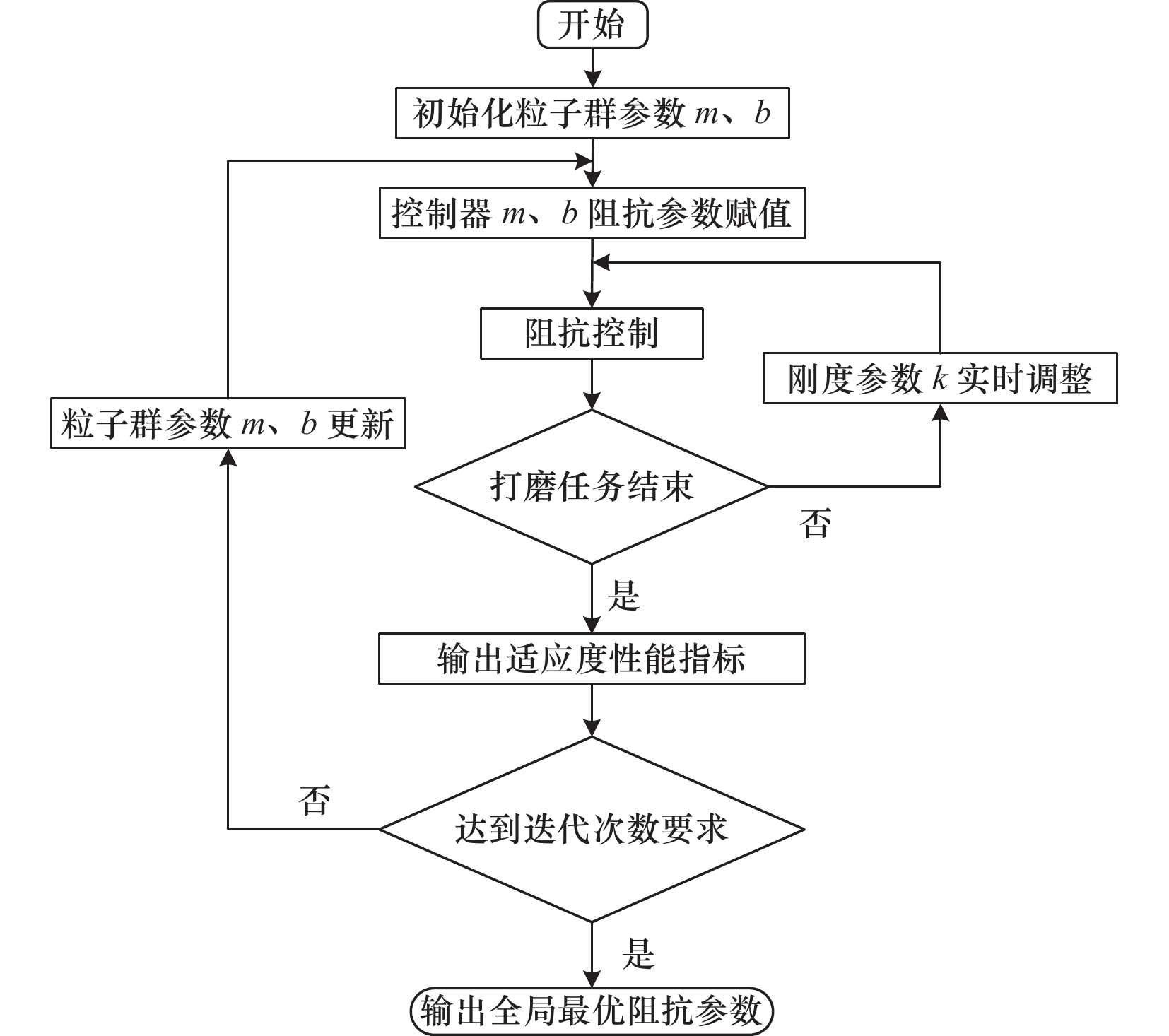
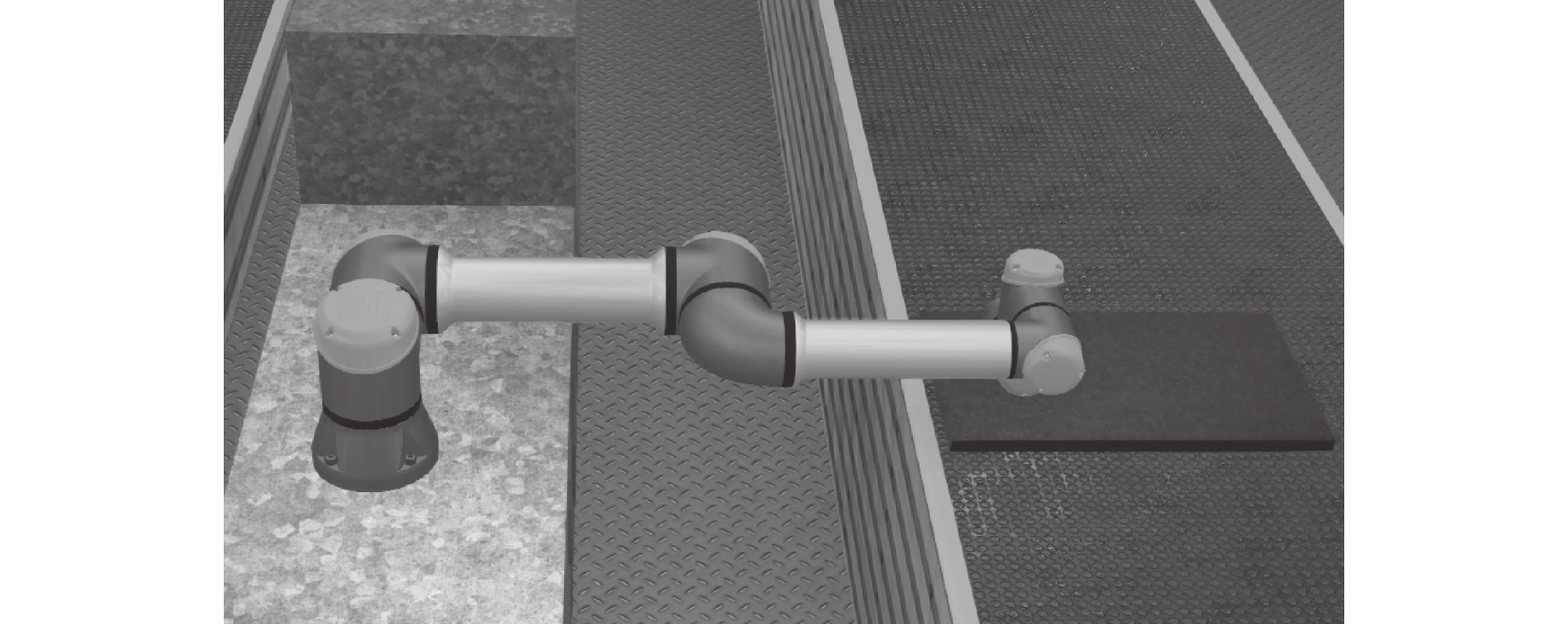
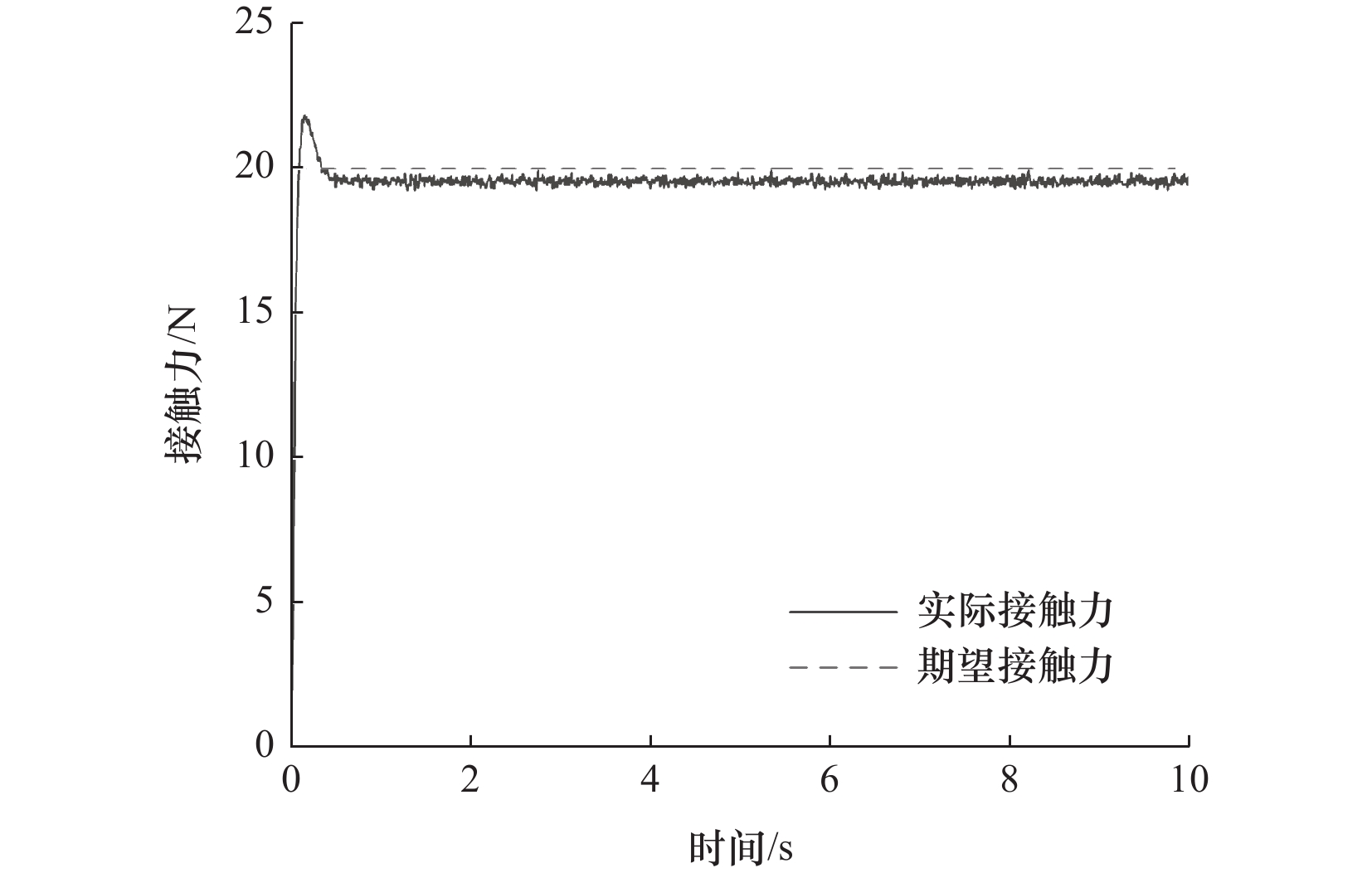
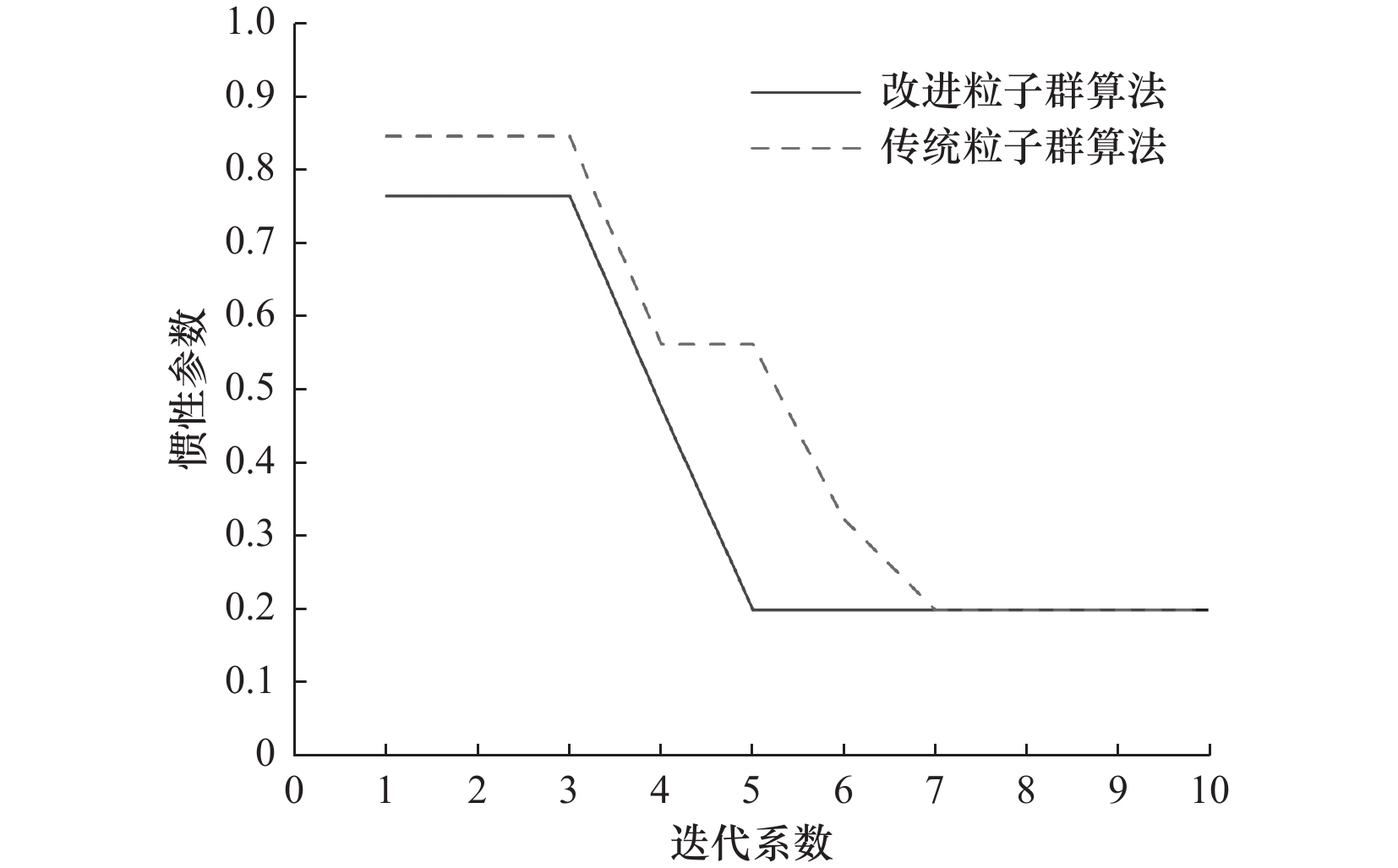
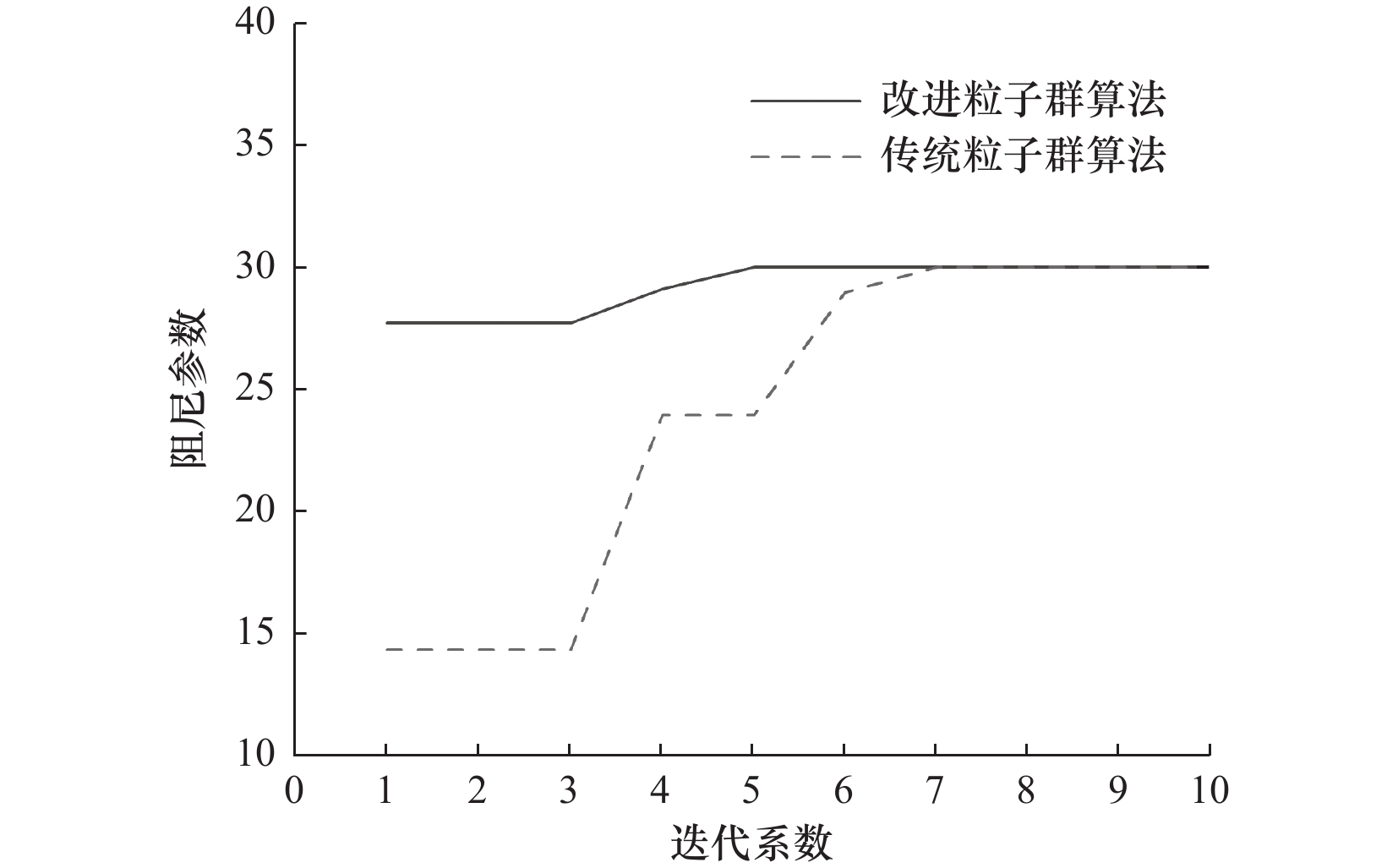
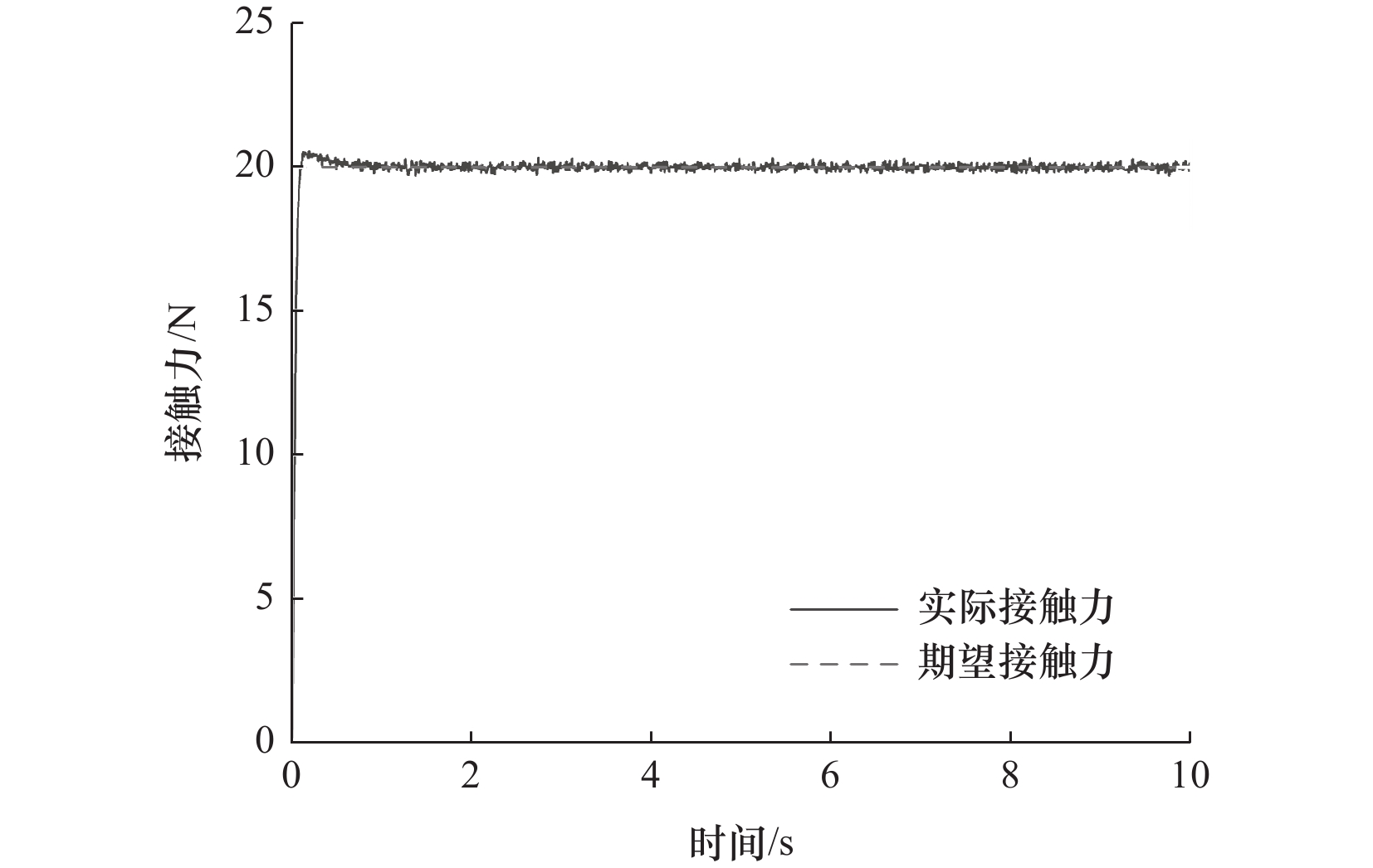
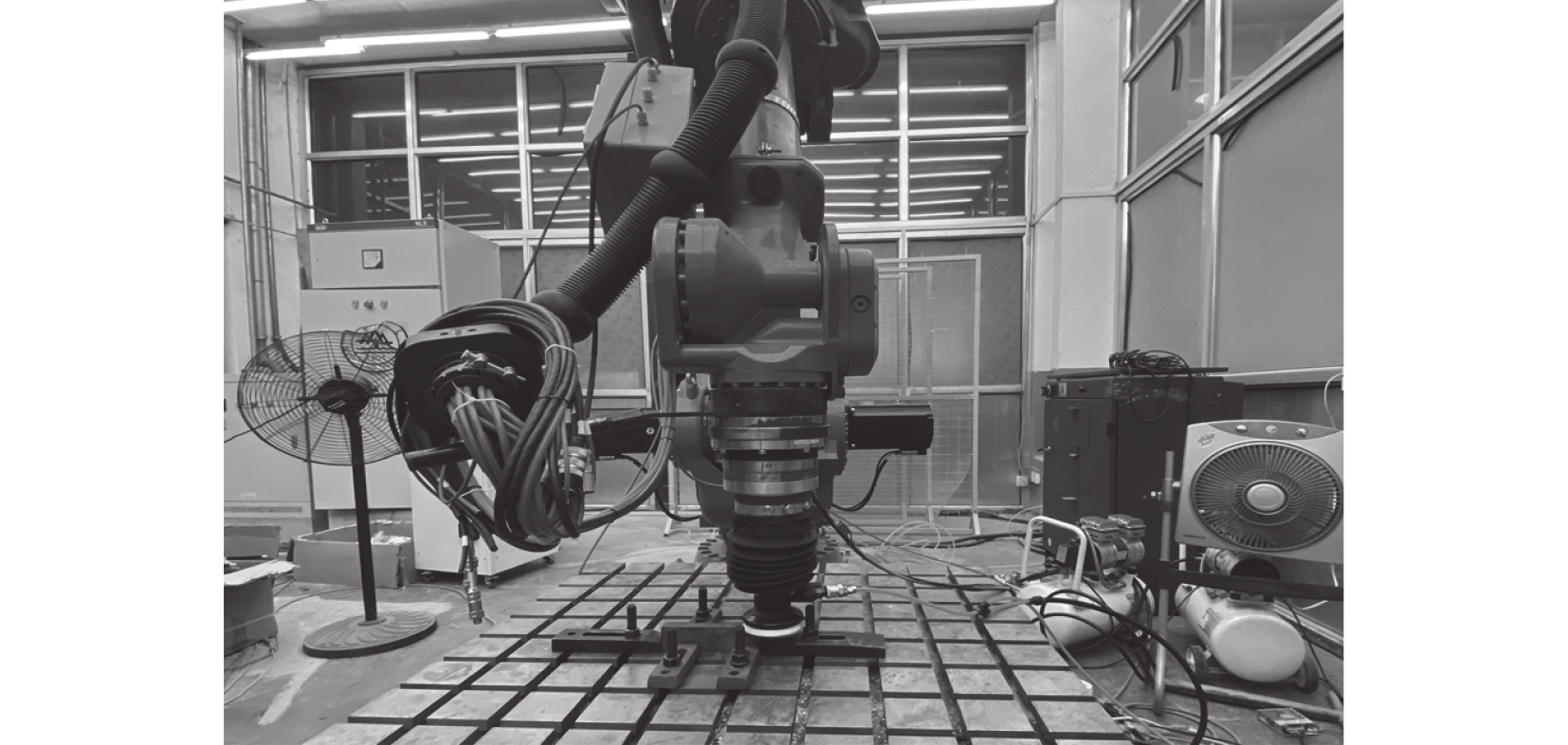
摘要: 面向机器人恒力打磨需求,文章设计了阻抗参数在线调整与离线优化的自适应阻抗控制算法,实现了打磨力控制。自适应阻抗控制算法将刚度参数作为时变参数,根据打磨接触力实时在线调整,以消除打磨过程中的稳态误差。针对阻尼参数和惯性参数难以整定的问题,以降低系统超调量和调整时间作为优化目标,采用改进粒子群算法进行阻抗参数离线优化。进行了机器人恒力打磨仿真,仿真结果表明,该方法可以综合改善机器人的恒力控制性能。开展了机器人恒力打磨实验,实验结果表明,该方法可以有效地提高机器人打磨表面质量。Abstract: An adaptive impedance control algorithm with online adjustment and offline optimization of impedance parameters was designed for the constant force polishing needs of robots to achieve polishing force control. The adaptive impedance control algorithm takes stiffness parameters as time-varying parameters and adjusts them online in real-time based on the grinding contact force to eliminate steady-state errors during the grinding process. Aiming at the problem of difficult tuning of damping and inertia parameters, an improved particle swarm optimization algorithm is adopted for offline optimization of impedance parameters to reduce system overshoot and adjustment time. A constant force polishing simulation of the robot was conducted, and the simulation results showed that the method proposed in this paper can comprehensively improve the constant force control performance of the robot. The robot constant force polishing experiment was conducted, and the experimental results showed that the method proposed in this paper can effectively improve the surface quality of robot polishing.
-
表 1 控制性能指标比较
方法 稳态误差/N 调整时间/s 超调量/(%) 传统阻抗控制 −0.46 0.34 11.28 自适应阻抗控制 −0.01 0.41 11.65 本文方法 −0.01 0.23 2.14  下载: 导出CSV
下载: 导出CSV
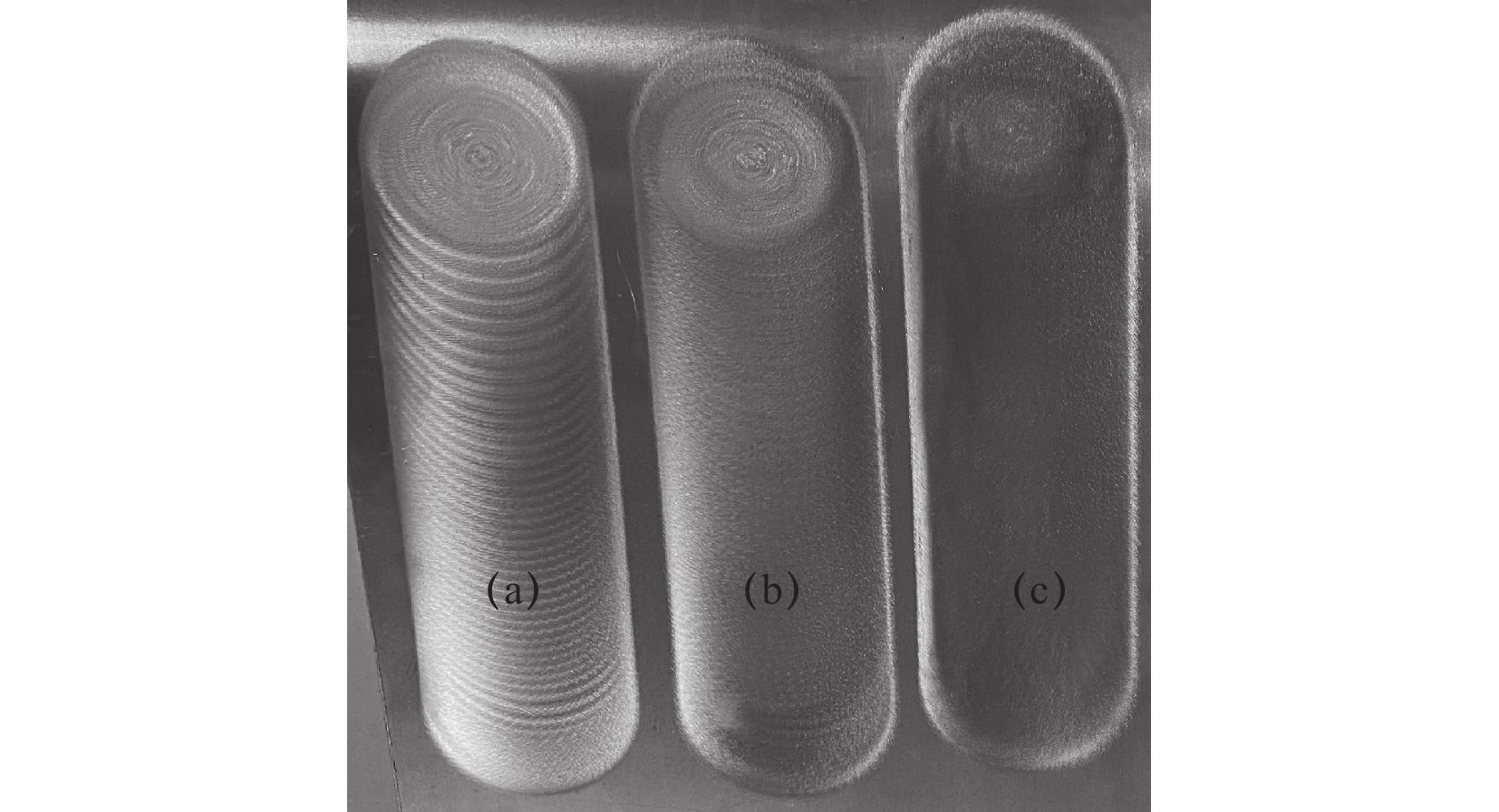
表 2 打磨后工件表面粗糙度对比
方法 粗糙度均值/μm 粗糙度标准差/μm 传统阻抗控制 0.36 0.34 变刚度参数阻抗控制 0.31 0.26 本文方法 0.27 0.22
下载: 导出CSV
-
[1] 赵江天. 工业机器人技术在智能制造中的应用及发展研究[J]. 自动化应用,2023,64(7):16-18. [2] 金磊,胡泽启,刘华明,等. 机器人在零件清理打磨中的应用及发展趋势[J]. 机床与液压,2017,45(15):4-9. [3] 顾寄南,姜晓丹,高国伟. 一种打磨机器人末端执行器的设计与分析[J]. 机电工程,2017,34(10):1085-1089. [4] Tian F J,Li Z G,Lv C,et al. Polishing pressure investigations of robot automatic polishing on curved surfaces[J]. Advanced Manufacturing Technology,2016,87(1-4):639-646. doi: 10.1007/s00170-016-8527-2 [5] Liao L,Xi F J,Liu K. Adaptive control of pressure tracking for polishing process[J]. Manufacturing Science and Engineering,2010,132(1):165-174. [6] Roswell A,Xi F J,Liu G. Modelling and analysis of contact stress for automated polishing[J]. Machine Tools and Manufacture,2006,46(3-4):424-435. doi: 10.1016/j.ijmachtools.2005.05.006 [7] Song H,Song J. Precision robotic deburring based on force control for arbitrarily shaped workpiece using CAD model matching[J]. Precision Engineering and Manufacturing,2013,14(1):85-91. doi: 10.1007/s12541-013-0013-2 [8] 蒙奎全,秦远田,蒋祺,等. 机器人末端复杂环境下力自适应控制[J]. 机床与液压,2022,50(17):12-18. [9] Hogan N. Impedance control:an approach to manipulation:Part I—theory[J]. Dynamic Systems,Measurement,and Control,1985,107(1):1-7. [10] 罗萍,杨波,常峥,等. 基于改进模糊自适应的机械手阻抗控制研究[J]. 机床与液压,2021,49(17):9-14. [11] Lakshminarayanan S,Kana S,Mohan D M,et al. An adaptive framework for robotic polishing based on impedance control[J]. Advanced Manufacturing Technology,2021,112(1-2):401-417. doi: 10.1007/s00170-020-06270-1 [12] 张泽坤. 基于最优有界椭球的工业机器人动力学参数辨识与阻抗控制研究[D]. 济南:山东大学,2022. [13] Zhou H B,Ma S T,Wang G L,et al. A hybrid control strategy for grinding and polishing robot based on adaptive impedance control[J]. Advances in Mechanical Engineering,2021,13(3):1-16. [14] Kosler H ,Pavlovi U ,Jezerek M ,et al. Adaptive robotic deburring of die-cast parts with position and orientation measurements using a 3D laser-triangulation sensor[J]. Strojniški vestnik - Journal of Mechanical Engineering,2016,62(4):207-212. [15] Ding Y F,Zhao J C,Min X P. Impedance control and parameter optimization of surface polishing robot based on reinforcement learning[J]. Proceedings of the Institution of Mechanical Engineers,Part B:Journal of Engineering Manufacture,2023,237(1-2):216-228. [16] Lee K,Buss M. Force tracking impedance control with variable target stiffness[J]. IFAC Proceedings Volumes,2008,41(2):6751-6756. doi: 10.3182/20080706-5-KR-1001.01144 [17] Seraji H,Colbaugh R. Force tracking in impedance control[J]. Robotics Research,1997,16(1):97-117. doi: 10.1177/027836499701600107 -

 下载:
下载:



 点击查看大图
点击查看大图
图(12) / 表(2)
计量
- 文章访问数: 170
- HTML全文浏览量: 15
- PDF下载量: 63
- 被引次数: 0


