

Research on trajectory planning method of 4+2 degree-of-freedom robot dedicated to blade grinding
-
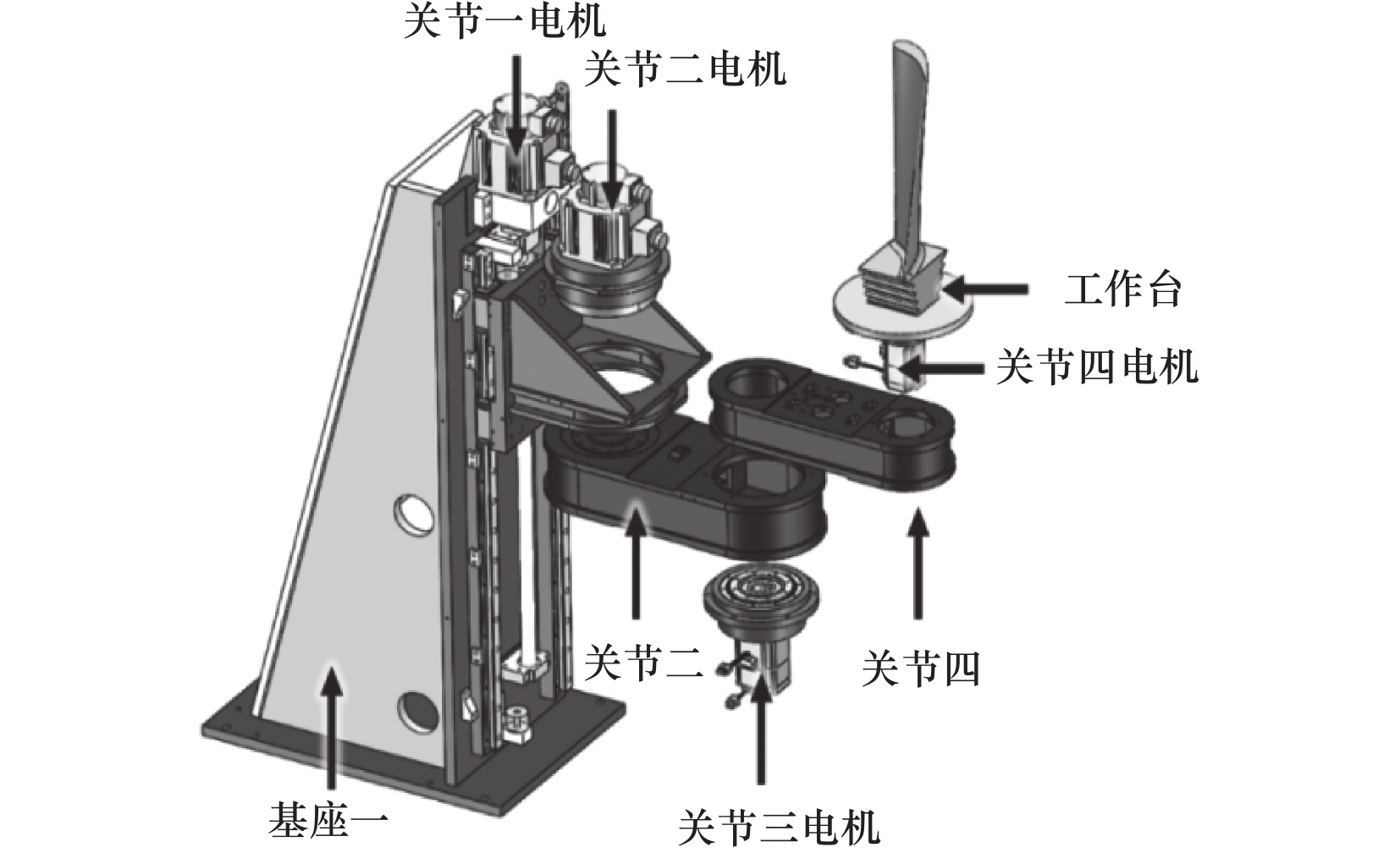
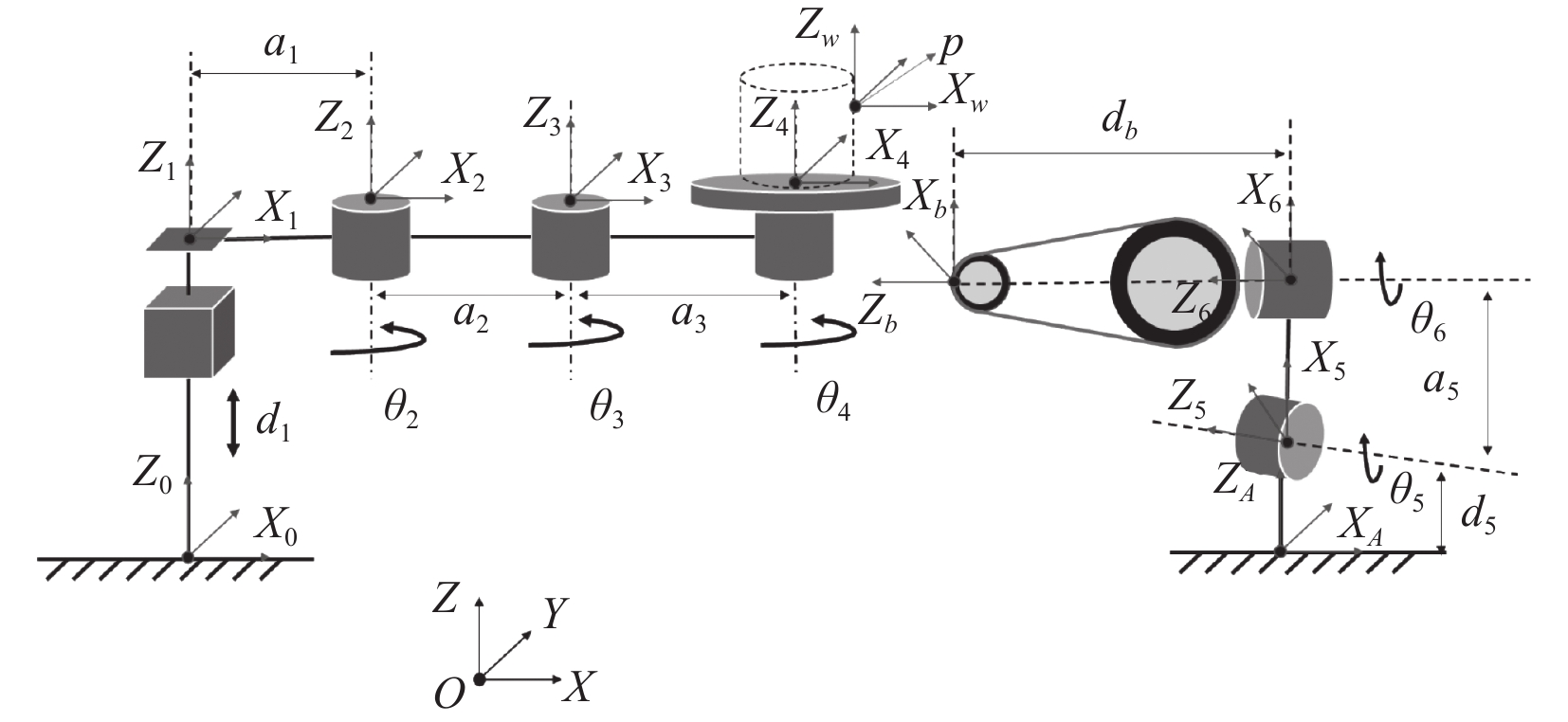
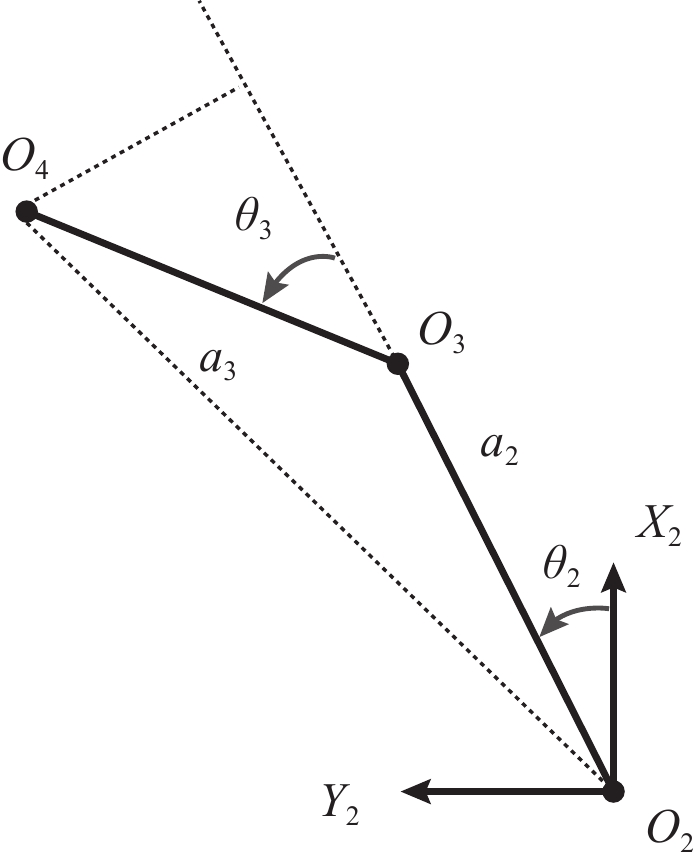
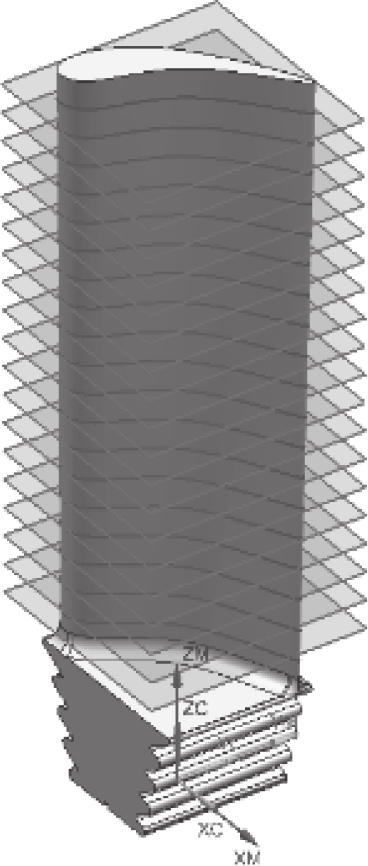
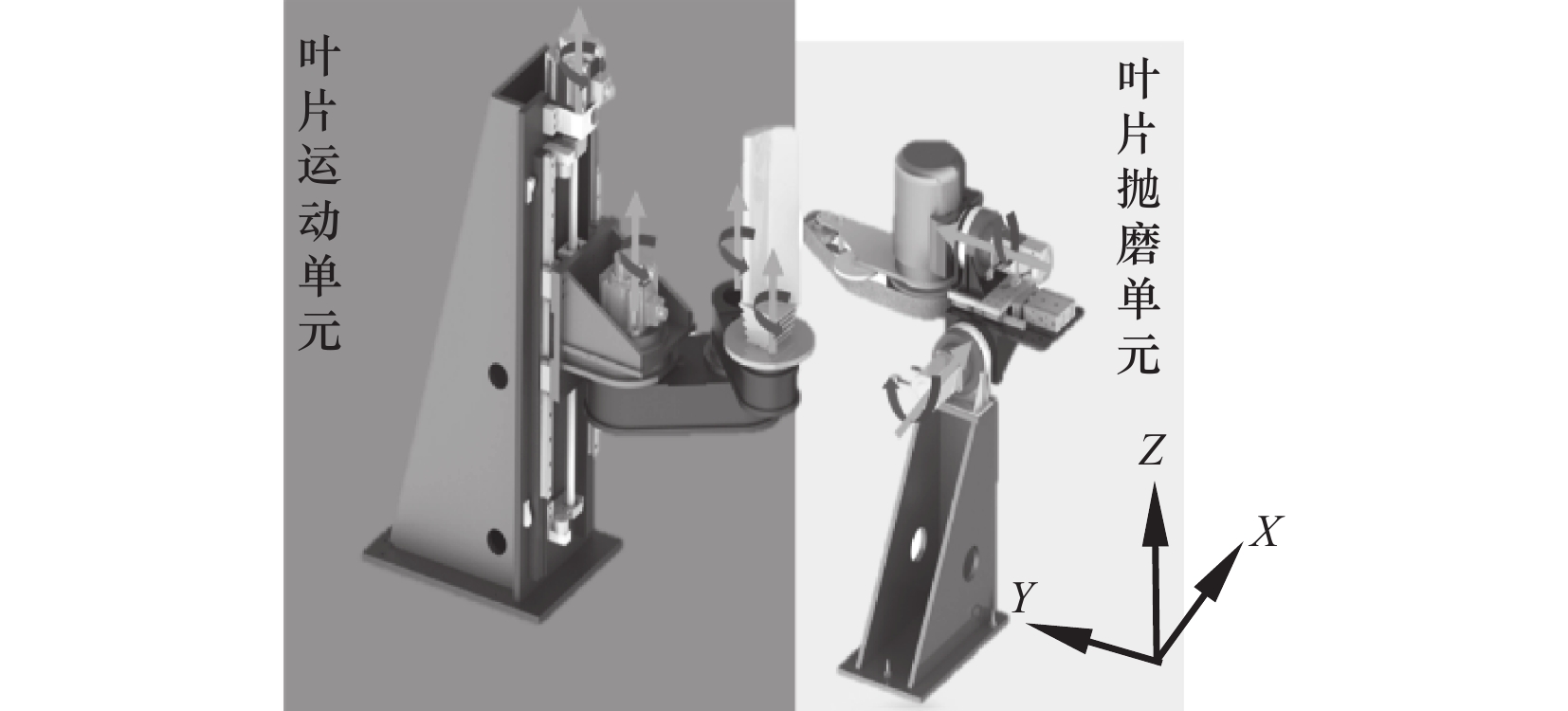
摘要: 砂带抛磨作为复杂曲面叶片精密加工的最后一道工序,其加工质量直接影响叶片的服役性能和寿命。传统6自由度机器人多关节串联具有明显的弱刚性,在末端夹持大型叶片时抗变形能力欠佳。为此,文章自主设计研发了4+2自由度叶片抛磨专用机器人系统,并开展复杂曲面叶片抛磨轨迹规划方法研究。首先基于D-H法建立该机器人运动学模型,进行机器人运动学的正、逆解的求解;其次给出了综合考虑抛磨工具与工件曲率的干涉、刀路轨迹行距和轨迹点密度对残留高度的影响规律的轨迹规划方法,建立了2个单元的协同运动模型保证叶片的加工实现;最后通过叶片抛磨轨迹数控程序验证了所获得的抛磨轨迹的正确性。Abstract: As the last process of precision machining of complex curved blades, the processing quality of abrasive belt grinding directly affects the service performance and life of the blades. The traditional six-degree-of-freedom robot with multi-joint tandem connection has obvious weak rigidity, and its deformation resistance is not good when clamping large blades at the end. For this reason, a 4+2 degree of freedom blade grinding robot system is designed and developed. Research of complex surface blade grinding trajectory planning method is carried out with the self-developed grinding robot system. First of all, the kinematics model of the robot is established based on the D-H method. The forward and inverse solutions of robot kinematics are given. A trajectory planning method is proposed that comprehensively considers the interference between polishing tools and workpiece curvature, the influence of tool path spacing and trajectory point density on residual height. A collaborative motion model of two units is established to ensure the machining implementation of the blades. Finally, the correctness of the obtained grinding trajectory is verified through numerical control program simulation of the blade polishing trajectory.
-
Key words:
- robots /
- blade grinding /
- trajectory planning /
- collaborative motion model
-
表 1 式(2)中各符号表达式
x y z n $ {n_x} = {{\rm{c}}_{1,2,3}}{{\rm{c}}_{\theta_ p}}{{\rm{c}}_{\psi_ p}} - {{\rm{s}}_{1,2,3}}{{\rm{s}}_{\psi_ p}} $ $ {n_y} = {{\rm{c}}_{\psi_ p}}{{\rm{c}}_{\theta_ p}}{{\rm{s}}_{2,3,4}} + {{\rm{c}}_{2,3,4}}{{\rm{s}}_{\psi_ p}} $ ${n_z} = - {{\rm{c}}_{\psi_ p}}{{\rm{s}}_{\theta_ p}}$ O $ {o}_{x}=-{\rm{c}}_{\psi_ p}{\rm{s}}_{2,3,4}-{\text{c}}_{2,3,4}{\rm{c}}_{\theta_ p}{\rm{s}}_{\psi_ p} $ ${o_y} = {{\rm{c}}_{2,3,4}}{{\rm{c}}_{\psi_ p}} - {{\rm{c}}_{\theta_ p}}{{\rm{s}}_{2,3,4}}{{\rm{s}}_{\psi_ p}}$ ${o_{\textit{z}}} = {{\rm{s}}_{\psi_ p}}{{\rm{s}}_{\theta_ p}}$ a ${a_x} = {{\mathrm{c}}_{2,3,4}}{{\mathrm{s}}_{\theta_ p}}$ ${a_y} = {{\rm{s}}_{2,3,4}}{{\rm{s}}_{\theta_ p}}$ ${a_{\textit{z}}} = {{\rm{c}}_{\theta_ p}}$ u ${u_x} = {a_1} + {a_2}{{\rm{c}}_2} + {a_3}{{\rm{c}}_{2,3}} + {p_x}{{\rm{c}}_{2,3,4}} - {p_y}{{\rm{s}}_{2,3,4}}$ ${u_y} = {p_y}{{\rm{c}}_{2,3,4}} + {a_2}{{\rm{s}}_2} + {a_3}{{\rm{s}}_{2,3}} + {p_x}{{\rm{s}}_{2,3,4}}$ ${u_{\textit{z}}} = {d_1} + {p_{\textit{z}}}$  下载: 导出CSV
下载: 导出CSV
-
[1] 黄云,肖贵坚,邹莱. 航空发动机叶片机器人精密砂带抛磨研究现状及发展趋势[J]. 航空学报,2019,40(3):53-72. [2] Wang W,Yun C. A path planning method for robotic belt surface grinding[J]. Chinese Journal of Aeronautics,2011,24(4):520-526. doi: 10.1016/S1000-9361(11)60060-5 [3] Zhu D H,Feng X Z,Xu X H,et al. Robotic grinding of complex components:A step towards efficient and intelligent machining-challenges,solutions,and applications[J]. Robotics and Computer-Integrated Manufacturing,2020,65:101908. doi: 10.1016/j.rcim.2019.101908 [4] 黄智,黄云,张明德,等. 自由曲面六轴联动砂带抛磨机床试验[J]. 重庆大学学报,2008(6):598-602. doi: 10.11835/j.issn.1000-582X.2008.06.002 [5] Wang G,Li W L,Jiang C,et al. Trajectory planning and optimization for robotic machining based on measured point cloud[J]. IEEE Transactions on Robotics,2022,38(3):1621-1637. doi: 10.1109/TRO.2021.3108506 [6] Yang F,Cai Z H,Chen Y P,et al. A robotic polishing trajectory planning method combining reverse engineering and finite element mesh technology for aero-engine turbine blade TBCs[J]. Journal of Thermal Spray Technology,2022,31(7):2050-2067. doi: 10.1007/s11666-022-01434-9 [7] 戚明轩,刘震磊,兆尔波,等. 某型航空发动机叶片逆向工程方法研究[J]. 航空精密制造技术,2021,57(1):13-16. [8] 于之靖,宋四同,王涛,等. 基于逆向工程的航空发动机叶片数字化建模[J]. 机床与液压,2011,39(17):122-125. doi: 10.3969/j.issn.1001-3881.2011.17.038 [9] 屈展,刘佳,杨胜强,等. 一种面向叶片的机器人抛磨轨迹规划方法[J]. 机械设计与制造,2022(6):259-264. doi: 10.3969/j.issn.1001-3997.2022.06.056 [10] Liang X F,Cai Z H,Zeng C N,et al. A robotic polishing trajectory planning method for TBCs of aero-engine turbine blade using measured point cloud[J]. Industrial Robot:The International Journal of Robotics Research and Application,Emerald Publishing Limited,2022,50(2):275-286. [11] 张海洋,杨文玉,张家军,等. 叶片机器人砂带磨抛的轨迹规划研究[J]. 机电工程,2014,31(5):578-581,586. [12] 王逸潇,俞桂英,丁烨,等. 轮毂曲面机器人力控磨抛路径规划方法[J]. 机械与电子,2021,39(4):70-75. doi: 10.3969/j.issn.1001-2257.2021.04.014 [13] 任利娟,张广鹏,王妮娜,等. 一种专用叶片砂带抛磨机器人:ZL202111162401.3[P]. 2022-12-09. -

 下载:
下载:




 点击查看大图
点击查看大图
图(12) / 表(1)
计量
- 文章访问数: 84
- HTML全文浏览量: 15
- PDF下载量: 27
- 被引次数: 0


