

Kinematics simulation experiment of towed welding robot in Matlab environment
-
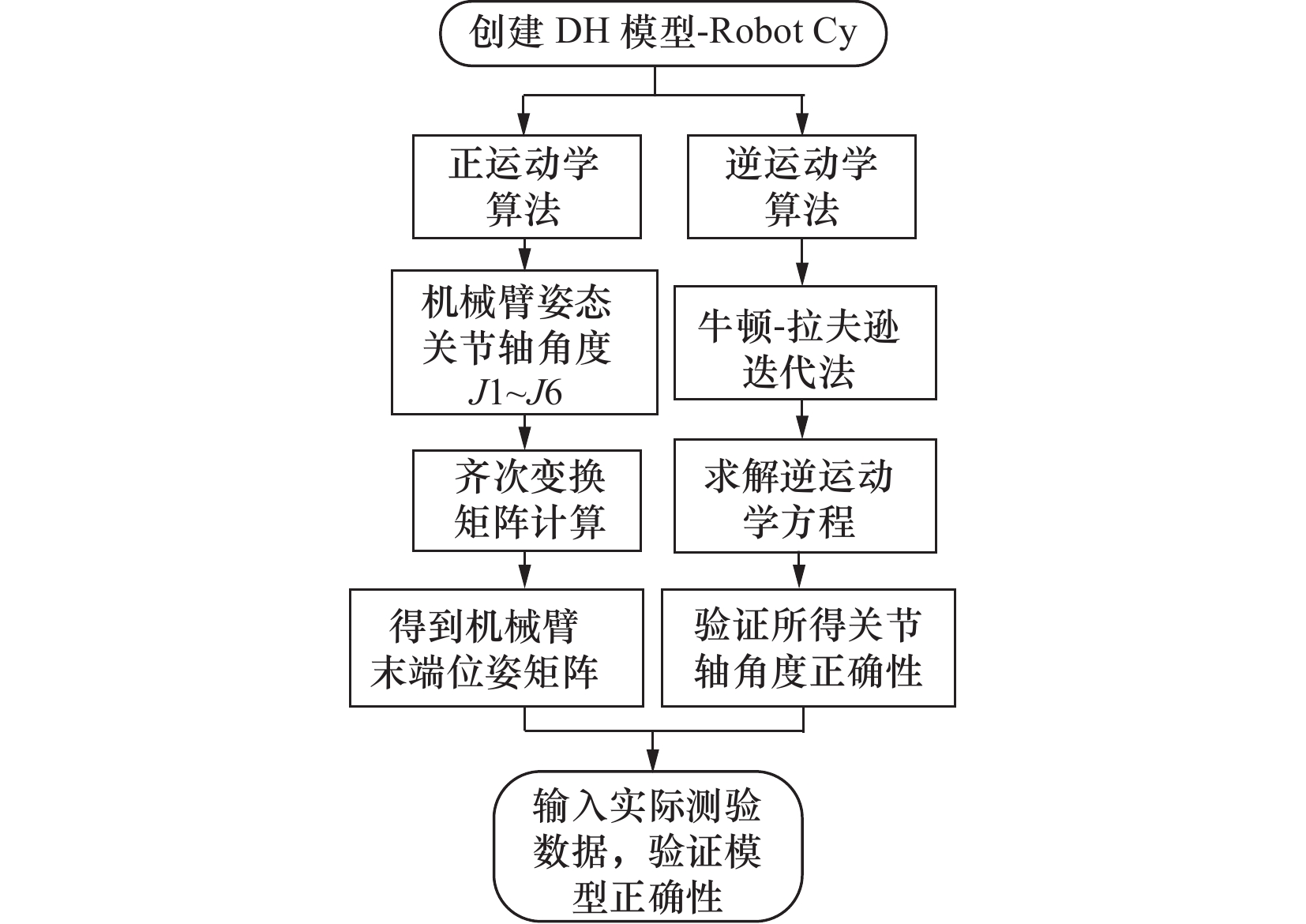
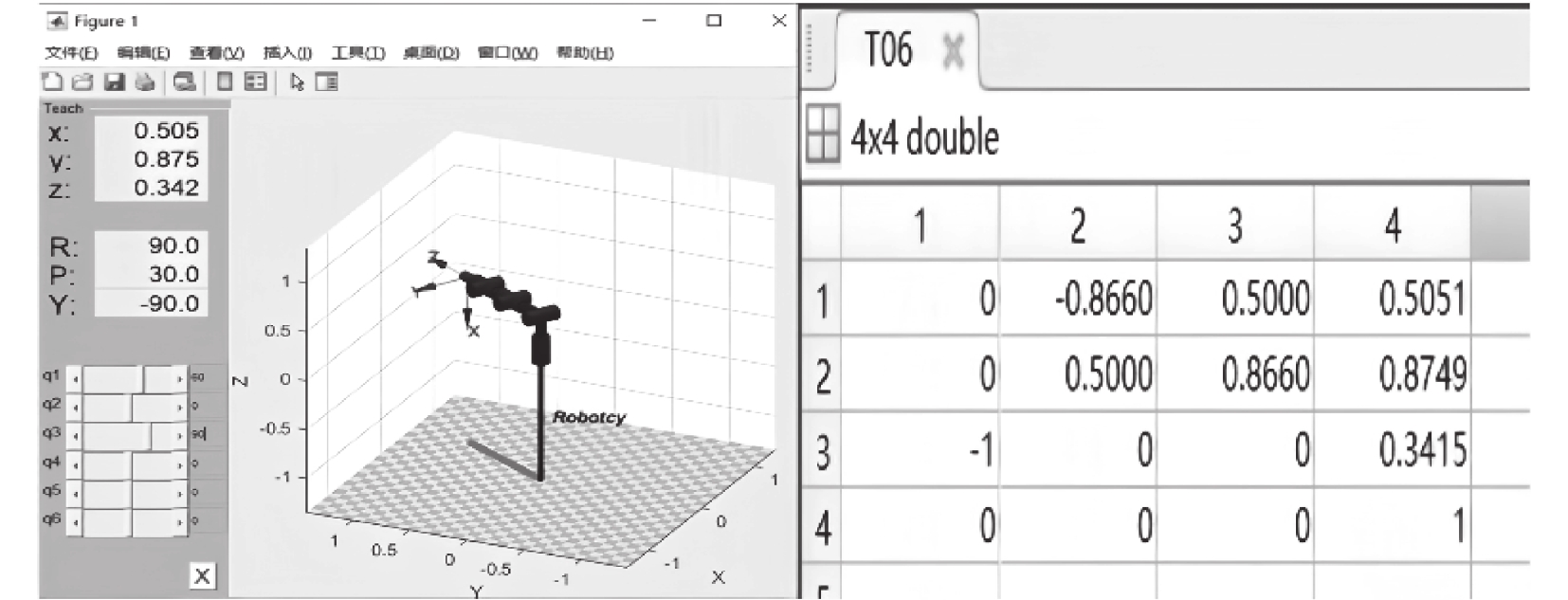
摘要: 将某ER系列拖拽式焊接机器人作为仿真实验对象,利用MDH (modified Denavit-Hartenberg)方法确定其DH参数,创建对应的关节坐标系与DH模型。基于Matlab软件中Tool-box10.4版本展开运动学分析求解。利用齐次变换矩阵顺次相乘完成运动学正解的推导,使用牛顿-拉夫逊迭代法(Newton-Raphson method)求解逆运动学方程的封闭解,验证了机器人运动学建模的合理性。在Matlab中完成了轨迹规划,在关节空间下对运动轨迹分别采用了三次、五次插值规划方法。完成了机械臂全局与限定条件下的工作空间分析,整体仿真结果充分证明了拖拽式焊接机器人运动性能的合理与稳定。该方案为进一步实验与研发工作奠定了理论基础,对同系列或构型机械臂有实际应用意义。Abstract: The D-H parameters of an ER series towed welding robot were determined by MDH (modified Denavit-Hartenberg) method, and the corresponding joint coordinate system and DH model were created. The kinematics analysis is solved based on Tool-box 10.4 in Matlab software. The linear multiplication of the homogeneous transformation matrix is used to deduce the forward solution of the kinematics, and the closed solution of the inverse kinematics equation is solved by Newton-Raphson method, which verifies the rationality of the kinematics modeling of the robot. The trajectory planning is completed in Matlab, and the motion trajectory is programmed with cubic and quintic interpolation methods in joint space respectively. The work space analysis of the robot arm under global and limited conditions is completed, and the overall simulation results fully prove that the motion performance of the towed welding robot is reasonable and stable. This scheme lays a theoretical foundation for further experiments and research and development, and has practical application significance for the same series or configuration of robotic arms.
-
Key words:
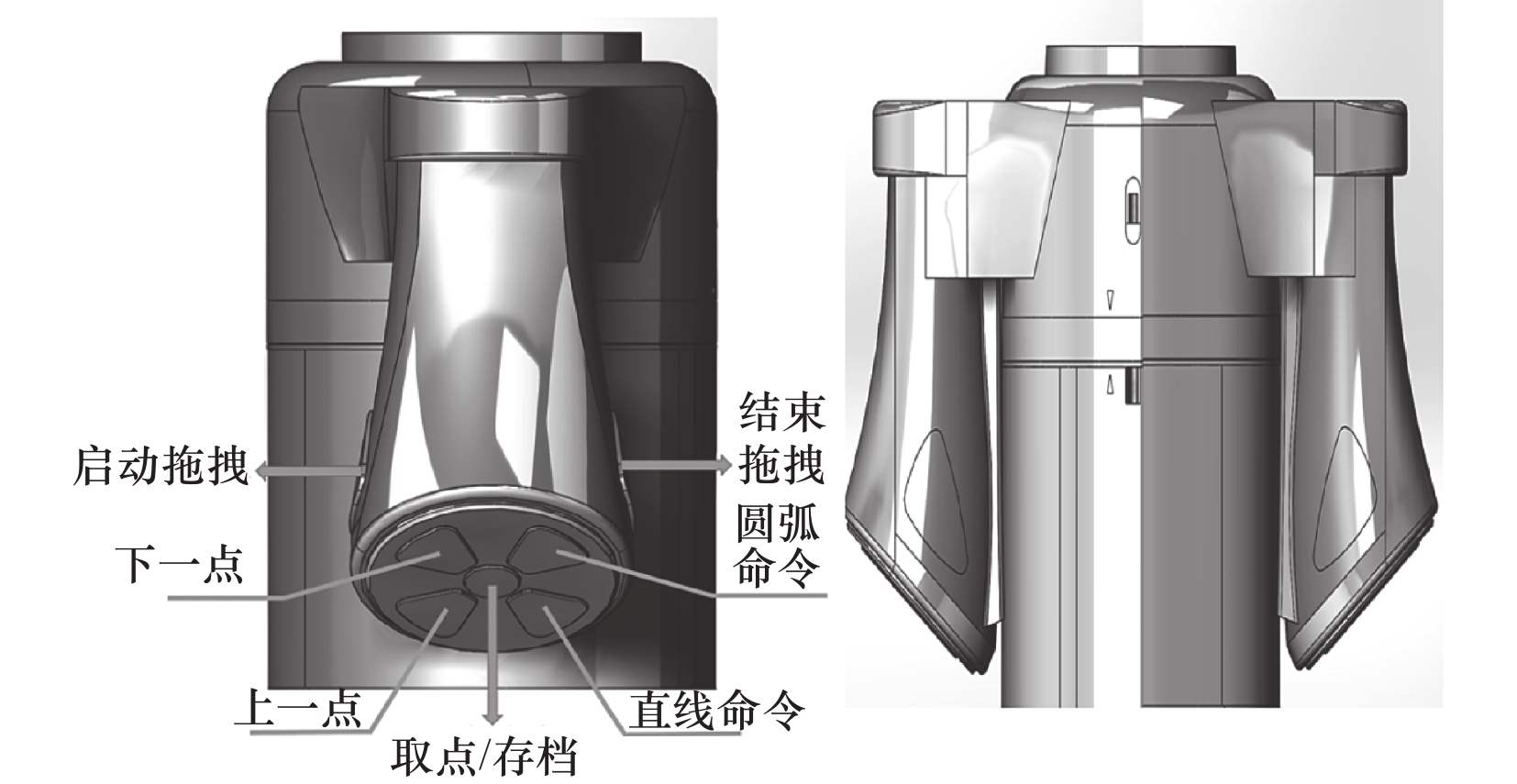
- Matlab /
- drag welding robot /
- kinematics simulation /
- trajectory planning /
- work space
-

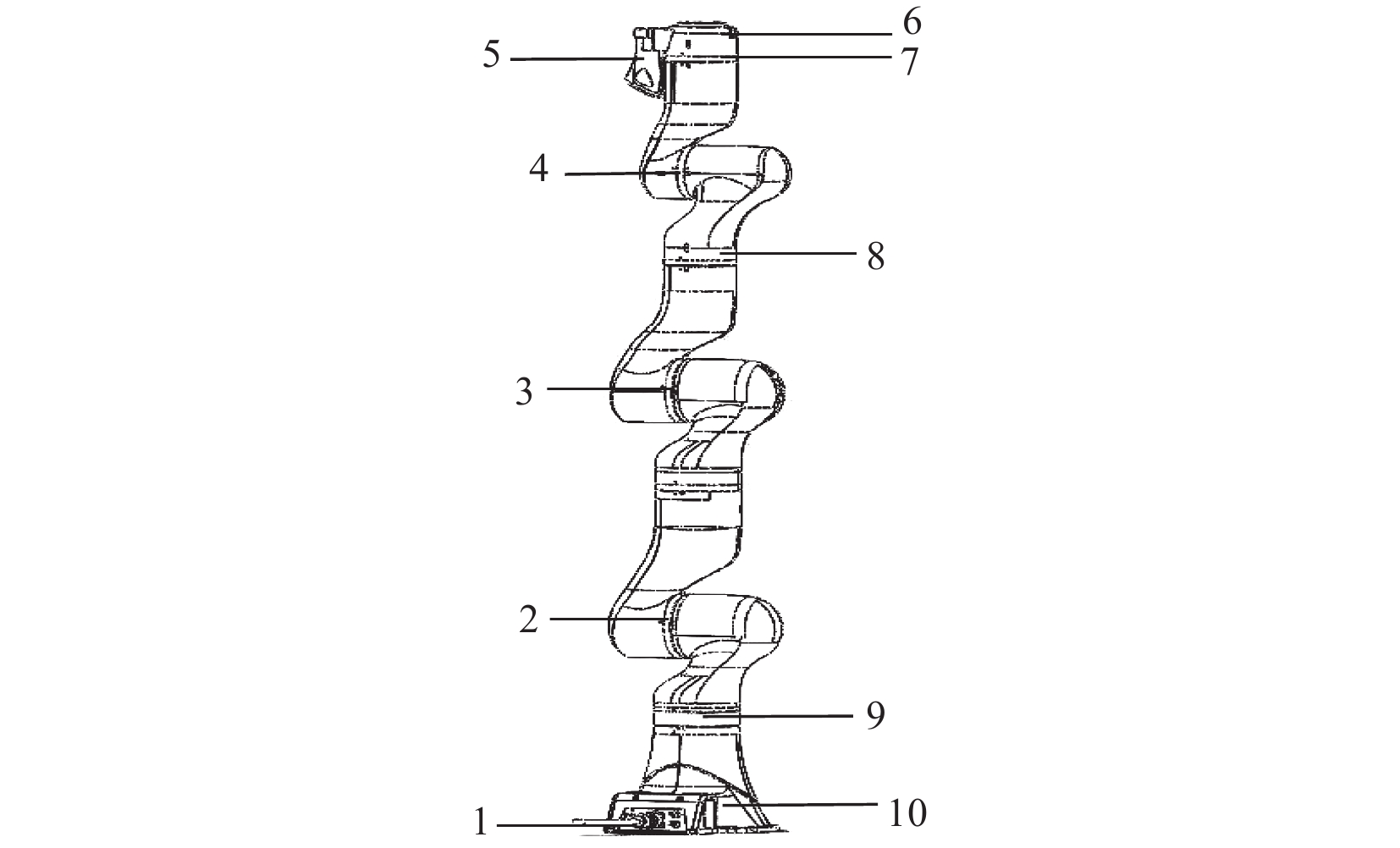
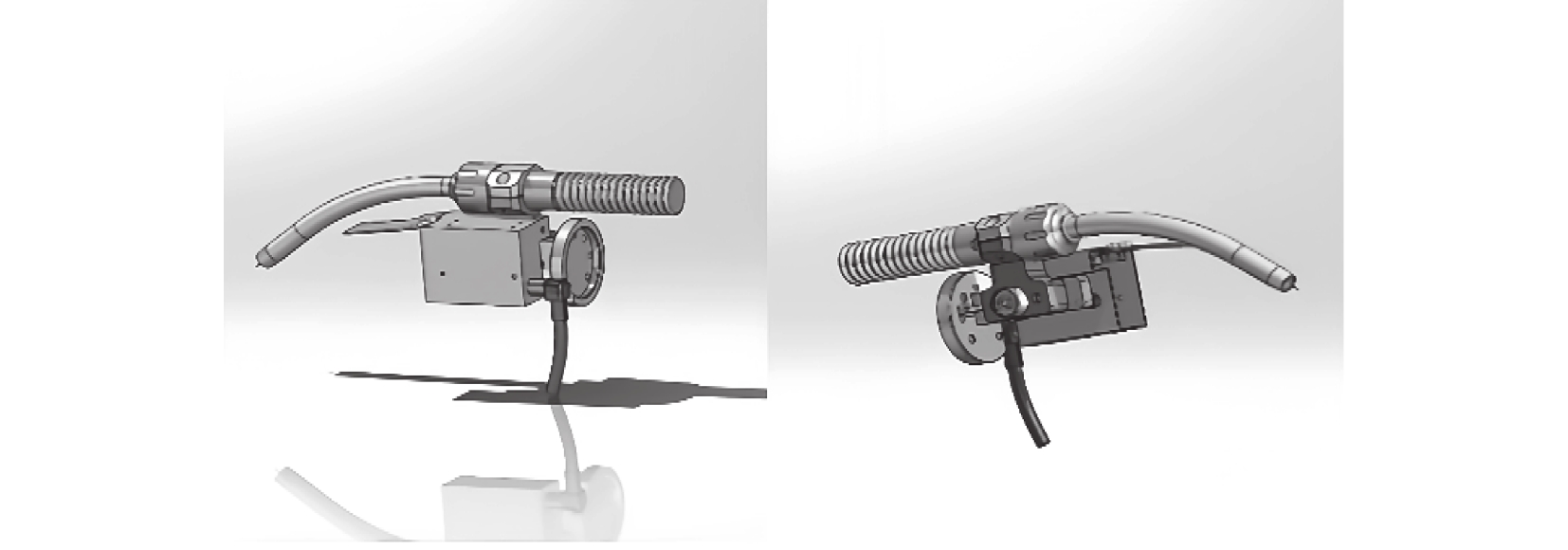
图 2 拖拽式焊接机器人结构图
1—通讯与电源电缆;2—J2轴;3—下臂J3轴;4—J5轴;5—拖拽控制器;6—末端法兰;7—J6轴;8—上臂J4轴;9—J1轴;10—基座(控制工程机)。
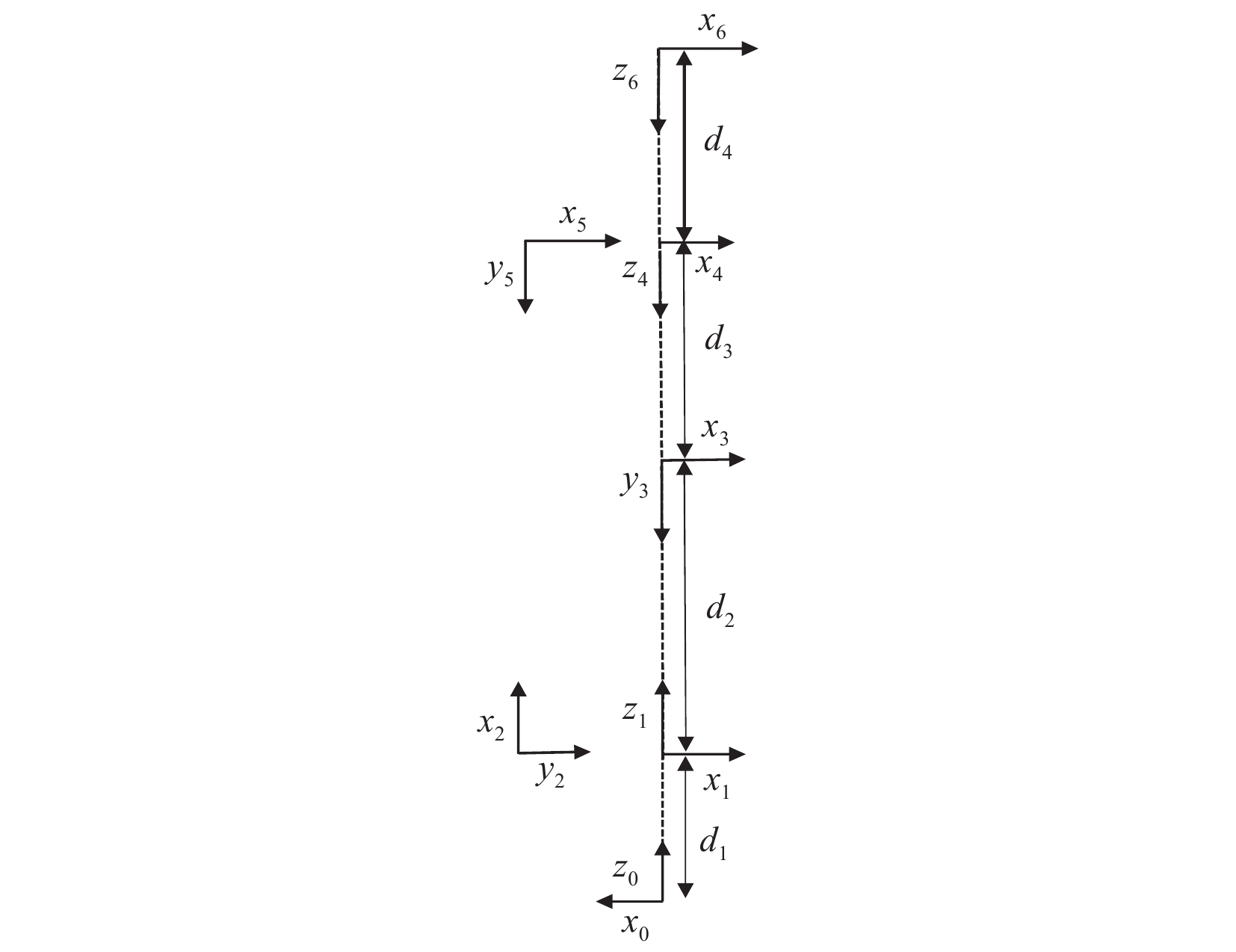
表 1 拖拽式焊接机器人DH参数表
连杆$ i $ 扭角$ {\alpha }_{i} $/(°) 杆长$ {a}_{i} $/mm 转角$ {\theta }_{i} $/(°) 偏距$ {d}_{i} $/ mm 1 0 0 $ {\theta }_{1} $(180) 341.5 2 −90 394 $ {\theta }_{2} $(−90) 0 3 0 0 $ {\theta }_{3} $(90) 0 4 −90 0 $ {\theta }_{4} $(0) −366 5 90 0 $ {\theta }_{5} $(0) 0 6 −90 0 $ {\theta }_{6} $(0) −250.3  下载: 导出CSV
下载: 导出CSV
表 2 五次插值方法参数限定表
运动关节 角速度限定 角加速度限定 1 0~$ 126^\circ /\mathrm{s}$ 0~$ 65^\circ /{\mathrm{s}}^{2} $ 2 0~$70^\circ /\mathrm{s} $ 0~$ 45^\circ /{\mathrm{s}}^{2} $ 3 0~$ 180^\circ /\mathrm{s} $ 0~$90^\circ /{\mathrm{s}}^{2} $ 4 0~$ 100^\circ /\mathrm{s} $ 0~$ 60^\circ /{\mathrm{s}}^{2} $ 5 0~$60^\circ /\mathrm{s} $ 0~$ 30^\circ /{\mathrm{s}}^{2} $ 6 0~$ 120^\circ /\mathrm{s} $ 0~$60^\circ /{\mathrm{s}}^{2} $
下载: 导出CSV
表 3 三次插值方法参数限定表
运动关节 角速度限定 角加速度限定 1 0~$ 120^\circ /\mathrm{s} $ 0~$60^\circ /{\mathrm{s}}^{2} $ 2 0~$ 130^\circ /\mathrm{s} $ 0~$70^\circ /{\mathrm{s}}^{2} $ 3 0~$ 130^\circ /\mathrm{s} $ 0~$70^\circ /{\mathrm{s}}^{2} $ 4 0~$ 100^\circ /\mathrm{s} $ 0~$60^\circ /{\mathrm{s}}^{2} $ 5 0~$ 60^\circ /\mathrm{s} $ 0~$30^\circ /{\mathrm{s}}^{2} $ 6 0~$ 150^\circ /\mathrm{s} $ 0~$ 90^\circ /{\mathrm{s}}^{2} $
下载: 导出CSV
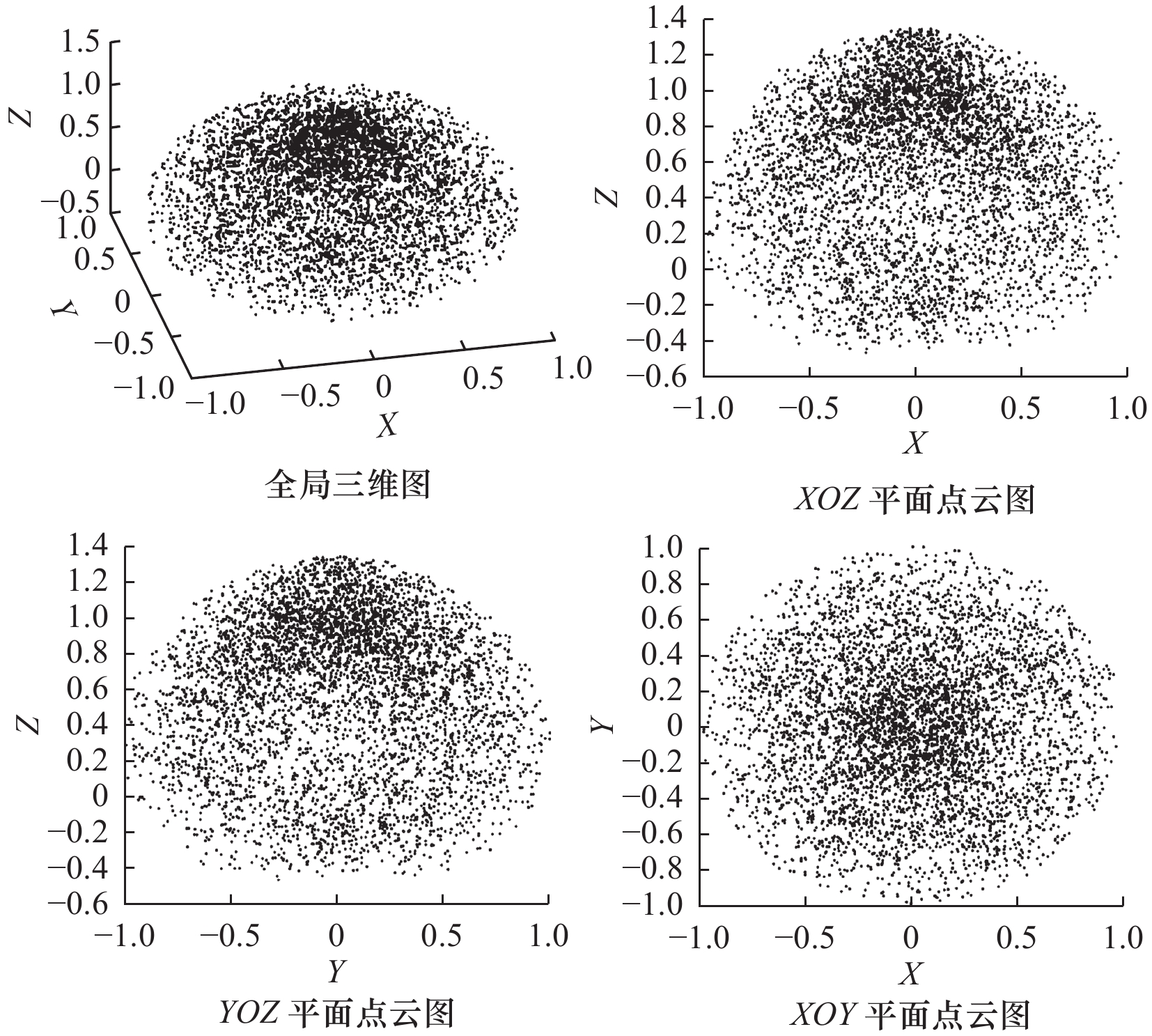
表 4 拖拽焊接机器人全局点云尺寸表
i 云图方向 点云尺寸/mm i1(−170°~170°) 轴向X min: −976.3 i2(−120°~120°) max: 982.9 i3(−120°~120°) 轴向Y min: −990.9 i4(−170°~170°) max: 1 011.6 i5(−120°~120°) 轴向Z min: −458.9 i6(−360°~360°) max: 1 352
下载: 导出CSV
表 5 机械臂实验信息表
工作位置 坐标方向 位姿信息 机械臂
基座位置XOY
正象限$ \mathrm{中}\mathrm{心}\mathrm{点}\left(305,595,56\right) $ 机械臂
零位位置世界
坐标正向$ \mathrm{世}\mathrm{界}\mathrm{坐}\mathrm{标}\left(\begin{array}{c}-11.15,-\mathrm{118.67,1696.88},\\ -\mathrm{47.82,124.38,134.33}\end{array}\right) $ 初始
工作位置世界
坐标正向${J}1 ~{J}6\left(0^\circ ,60^\circ ,115^\circ ,0^\circ ,-90^\circ ,-42^\circ \right) $
$ \mathrm{世}\mathrm{界}\mathrm{坐}\mathrm{标}\left(\begin{array}{c}223.37,-\mathrm{81.88,180},\\ -\mathrm{14.16,59.31},-8.15\end{array}\right) $底板、立板
补板、肘板X正向 $ \mathrm{初}\mathrm{始}\mathrm{坐}\mathrm{标}\left(\begin{array}{c}\mathrm{671.24,241.92,142.09},\\ \mathrm{23.07,56.27},-9.83\end{array}\right) $ ${J}1 ~{J}6\left(\begin{array}{c}24.3^\circ ,-14.14^\circ ,-80.75^\circ ,\\ -6.08^\circ ,-56.12^\circ ,-26.44^\circ \end{array}\right) $ $ \mathrm{终}\mathrm{止}\mathrm{坐}\mathrm{标}\left(\begin{array}{c}485.53,-402.47,-180.51,\\ -\mathrm{64.80,65.01},-17.79\end{array}\right) $ ${J}1 ~{J}6\left(\begin{array}{c}-32.39^\circ ,-33.30^\circ ,-104.80^\circ ,\\ -64.80^\circ ,65.01^\circ ,-17.79^\circ \end{array}\right) $ 侧板底角、
面板下方底角Y正向 $初始坐标 \left(\begin{array}{c}\mathrm{686.51,509.76},-4.57,\\ \mathrm{35.79,124.02,21.84}\end{array}\right) $ ${J}1 ~{J}6\left(\begin{array}{c}-7.53^\circ ,-78.87^\circ ,-78.01^\circ ,\\ -97.17^\circ ,-90.34^\circ ,69.28^\circ \end{array}\right) $ $终止坐标 \left(\begin{array}{c}-\mathrm{94.70,337.02,41.36},\\ \mathrm{140.79,15.87},-71.54\end{array}\right) $ ${J}1~{J}6\left(\begin{array}{c}155.95^\circ ,-49.15^\circ ,-70.44^\circ ,\\ 26.56^\circ ,-93.50^\circ ,-91.77^\circ \end{array}\right) $ 右侧板底角、
面板下方底角Y负向 $初始坐标 \left(\begin{array}{c}461.02,-\mathrm{506.58,157.93},\\ -\mathrm{130.09,73.16,74.42}\end{array}\right) $ ${J}1~{J}6\left(\begin{array}{c}8.52^\circ ,-86.05^\circ ,-67.36^\circ ,\\ 90.91^\circ ,-104.61^\circ ,191.21^\circ \end{array}\right) $ $ \mathrm{终}\mathrm{止}\mathrm{坐}\mathrm{标}\left(\begin{array}{c}-524.98,-427.72,-39.89,\\ -\mathrm{46.83,33.14},-41.54\end{array}\right) $ ${J}1 ~{J}6\left(\begin{array}{c}-137.78^\circ ,-13.46^\circ ,-118.70^\circ ,\\ -8.71^\circ ,-25.75^\circ ,53.26^\circ \end{array}\right) $
下载: 导出CSV
表 6 拖拽式焊接机器人限定点云尺寸表
$ i $ 云图方向 点云尺寸/mm $ i $1(−140$ ^\circ $~−160$ ^\circ $) 轴向X min:−816.7 $ i $2(−14°~−87$ ^\circ $) max: 21.9 $ i $3(−120°~−67°) 轴向Y min:−622.8 $ i $4(−97.2°~91.91°) max: 130.3 $ i $5(−104.6°~65$ ^\circ $) 轴向Z min:−249.6 $ i $6(−91.8°~74.4$ ^\circ $) max: 953.6
下载: 导出CSV
-
[1] 中国机电一体化技术应用协会. 中国工业机器人产业发展白皮书(2020年)[R]. [2023-10-13]. [2] 中国电子学会. 中国机器人产业发展报告(2022年)[R]. [2023-10-13]. [3] 邢红辉,王保升,洪磊,等. 基于MATLAB的六自由度焊接机器人的运动学仿真与轨迹规划[J]. 机械设计与制造工程,2018,47(12):43-47. doi: 10.3969/j.issn.2095-509X.2018.12.010 [4] 冷玉珊,邓子龙,高兴军. 基于MATLAB六自由度串联机器人运动学分析[J]. 制造业自动化,2020,42(9):56-61. [5] 程堂灿,张凤生,王浩. 基于MATLAB的采摘机器人运动特性分析与仿真研究[J]. 机床与液压,2019,47(11):29-34. doi: 10.3969/j.issn.1001-3881.2019.11.006 [6] 薛良豪,魏敏,张立新,等. 马鞍形焊缝焊接机器人运动学分析及MATLAB仿真[J]. 机床与液压,2019,47(15):58-62. doi: 10.3969/j.issn.1001-3881.2019.15.013 [7] 黄旭楠,岳夏,冼颂智. 基于MATLAB的码垛机械手运动学分析与仿真[J]. 机床与液压,2017,45(5):35-39. doi: 10.3969/j.issn.1001-3881.2017.05.009 [8] 朱志明,马国锐,郭吉昌,等. 基于蒙特卡洛法的箱型钢结构焊接机器人工作空间分析[J]. 焊接,2016(9):1-5,72. doi: 10.3969/j.issn.1001-1382.2016.09.001 [9] 宫成. 矿用智能遥控搬运拖拽机器人研发[J]. 煤矿机械,2022,43(1):57-59. [10] 杨恺,高宏力,施景皓,等. 一种巡线机器人的机械结构设计及运动学分析[J]. 机械设计与制造,2021(5):256-259. doi: 10.3969/j.issn.1001-3997.2021.05.058 [11] 刘佳祺. 拖拽式多关节示教机器人位姿学习平台硬件开发[D]. 武汉:华中科技大学,2018. -

 下载:
下载:








 点击查看大图
点击查看大图
图(18) / 表(6)
计量
- 文章访问数: 863
- HTML全文浏览量: 28
- PDF下载量: 37
- 被引次数: 0


