

Parameter identification of hysteresis model of macro-micro composite actuator based on improved gray wolf algorithm
-
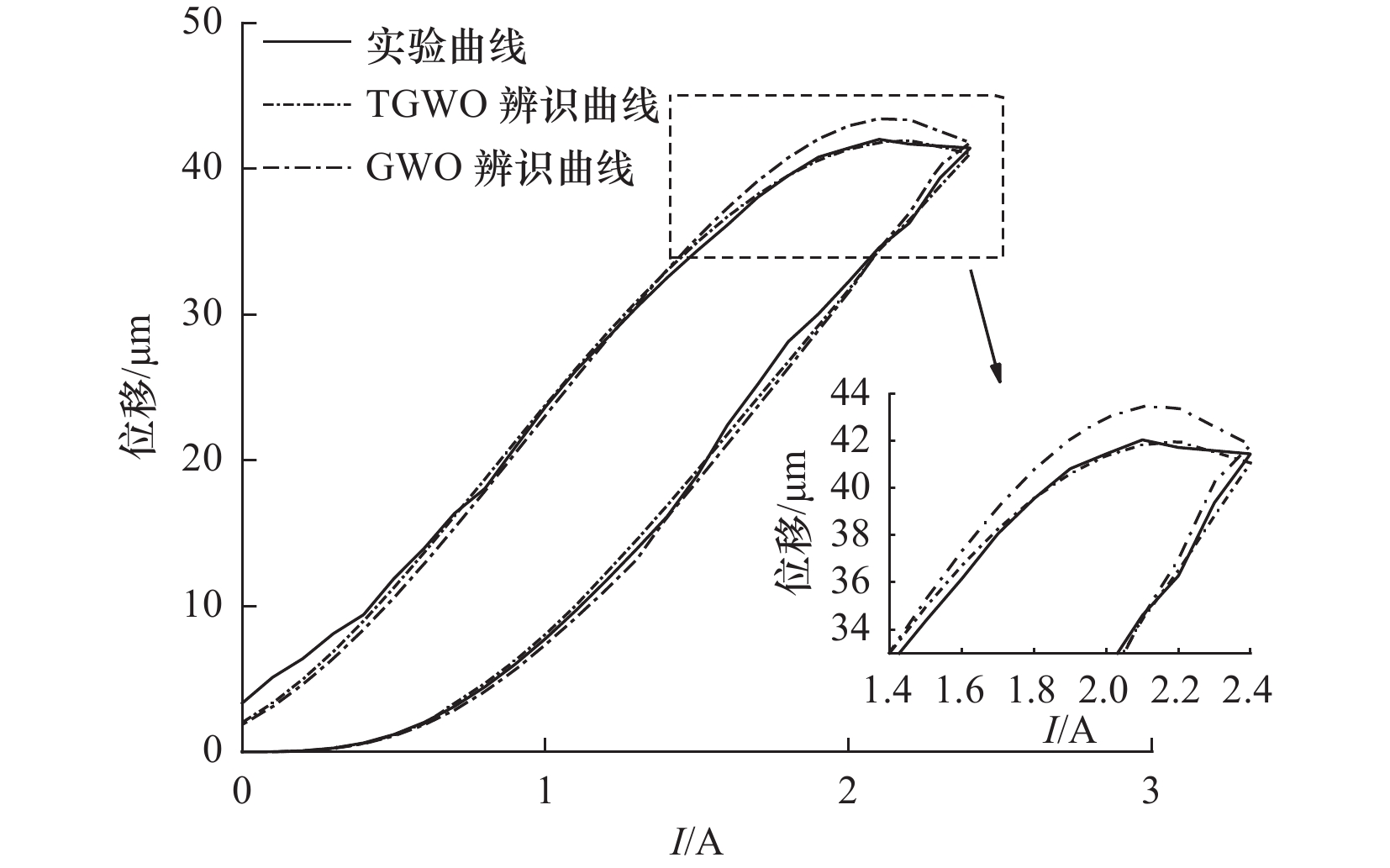
摘要: 精确辨识磁滞模型参数是保证宏微复合驱动器位移跟踪精度的关键,针对传统灰狼算法(GWO)存在局部最小值和求解精度不高的缺陷,文章提出一种改进的灰狼算法(TGWO)。通过Singer混沌映射优化了灰狼个体的初始位置,以增加种群多样性;采用非线性收敛因子策略提高了局部开发度和全局搜索度;在种群位置迭代更新中引入动态权重更新和自适应更新策略。通过仿真和实验表明:该算法能有效可靠地辨识宏微复合驱动器磁滞模型的参数,平均相对误差为4.6%,拥有更高的精度和收敛性。
-
关键词:
- 宏微复合驱动器 /
- Jiles-Atherton磁滞模型 /
- 改进的灰狼算法 /
- 参数辨识
Abstract: The accurate identification of hysteresis model parameters is the key to ensuring the displacement tracking accuracy of macro-micro composite actuators. To address the shortcomings of traditional grey wolf algorithm (GWO), which is prone to local optima and premature convergence, an improved grey wolf algorithm (TGWO) is proposed. Updating the initial position of gray wolf individuals based on Singer chaotic mapping to improve population diversity; Adopting a nonlinear convergence factor strategy to improve local development and global search performance; Introducing dynamic weight updating and adaptive updating strategies in the iterative updating of population positions. Simulation and experiments have shown that this algorithm can effectively and reliably identify the parameters of the hysteresis model of macro-micro composite actuators, The mean relative error is 4.6%, with higher accuracy and convergence. -
表 1 参数辨识结果
参数 取值范围 GWO TGWO α [0,0.1] 0 0.007 a/(×103) [3,15] 5.064 6.288 k/(×103) [1,8] 3.165 4.137 c [0,0.3] 0.002 0.272 Ms/(×105A/m) [1,9] 1.008 6.309  下载: 导出CSV
下载: 导出CSV
-
[1] Sakakibara H,Akimaru H,Hiro A,et al. Advanced plating photoresist development for advancedIC packages[C]. 2015 16th International Conference on Electronic Packaging Technology (ICEPT).IEEE,2015. [2] Sharon A,Hogan N,Hardt D. High bandwidth force regulation and nertia reduction using a macro/micro manipulator system[J]. IEEE International Conference on Robotics & Automation. IEEE,1988(1):126-132. [3] Sharon A. The macro/micro-manipulator:an improved architecture for robot control[J]. Robotics& Computer-Integrated Manufacturing,1993,10(3):209-221. [4] 龙涛元,张铁民,廖贻泳. 宏微运动一体化压电直线电机驱动电路设计[J]. 中国电机工程学报,2015,35(S1):184-189. [5] 喻曹丰,王玉,陈卓,等. 同轴集成式宏微复合驱动器的磁路建模分析与实验研究[J]. 中国电机工程学报,2022,42(16):6083-6093,6182. [6] Mayergoyz I D. Dynamic preisach models of hysteresis[J]. IEEE Transactions on Magnetics,1988,24(6):2925-2927. doi: 10.1109/20.92290 [7] Kuhnen K. Modeling,identification and compensation of complex hysteretic nonlinearities:a modified prandtl-ishlinskii approach[J]. European Journal of Control,2003,9(4):407-418. doi: 10.3166/ejc.9.407-418 [8] Jiles D C,Atherton D. Ferromagnetic hysteresis[J]. IEEE Transactions on Magnetics,1983,19(5):2183-2185. doi: 10.1109/TMAG.1983.1062594 [9] Jiles D C,Thoelke J B,Devine M K. Numerical determination of hysteresis parameters for the modeling of magnetic properties using the theory of ferromagnetic hysteresis[J]. IEEE Transactions on Magnetics,1992,28(1):27-35. doi: 10.1109/20.119813 [10] 王珊珊. 基于J-A模型的GMM-FBG交流电流传感器建模与参数辨识[D]. 燕山:燕山大学,2021. [11] 刘慧芳,贾振元,王福吉,等. 超磁致伸缩执行器位移模型的参数辨识[J]. 机械工程学报,2011,47(15):115-120. [12] Irjalili S,Mirjalili S M,Lewis A. Grey wolf optimizer[J]. Advances in Engineering Software,2014,69(3):46-61. [13] 丁瑞成,周玉成. 引入莱维飞行与动态权重的改进灰狼算法[J]. 计算机工程与应用,2022,58(23):74-82. [14] 林钰棽,魏云龙,陈琪琪,等. 一种嵌入式计算平台的Sigmoid函数优化方法[J]. 小型微型计算机系统,2021,42(10):2053-2058. doi: 10.3969/j.issn.1000-1220.2021.10.007 [15] 王秋萍,王梦娜,王晓峰. 改进收敛因子和比例权重的灰狼优化算法[J]. 计算机工程与应用,2019,55(21):60-65,98. doi: 10.3778/j.issn.1002-8331.1808-0117 -

 下载:
下载:




 点击查看大图
点击查看大图

图(8) / 表(1)
计量
- 文章访问数: 33
- HTML全文浏览量: 13
- PDF下载量: 8
- 被引次数: 0


