

An improved approach law for PMSM non-singular terminal sliding mode control
-
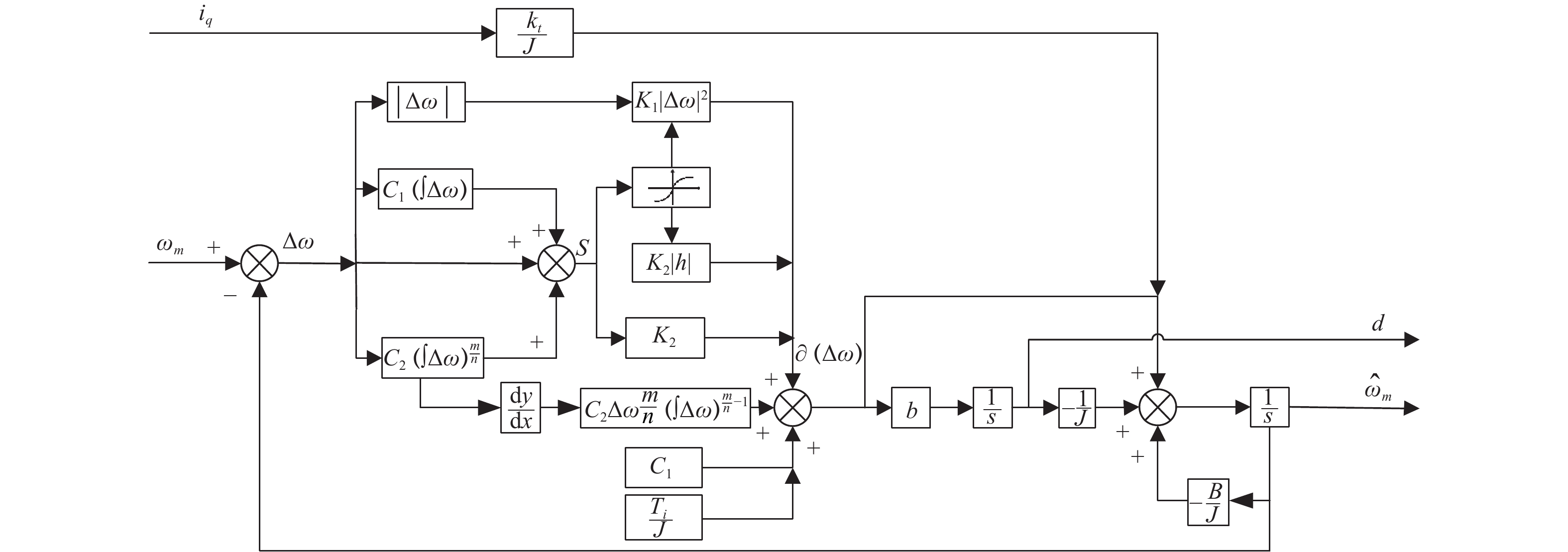
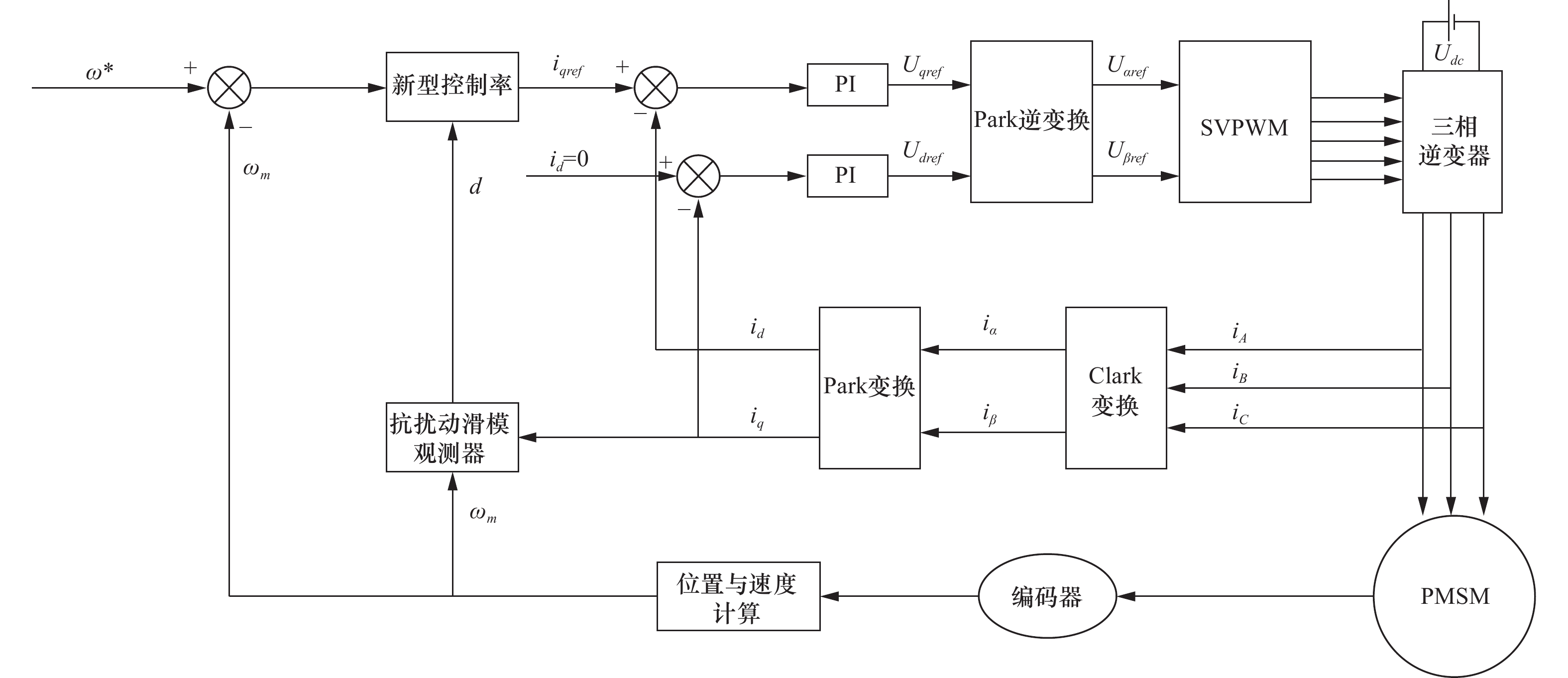
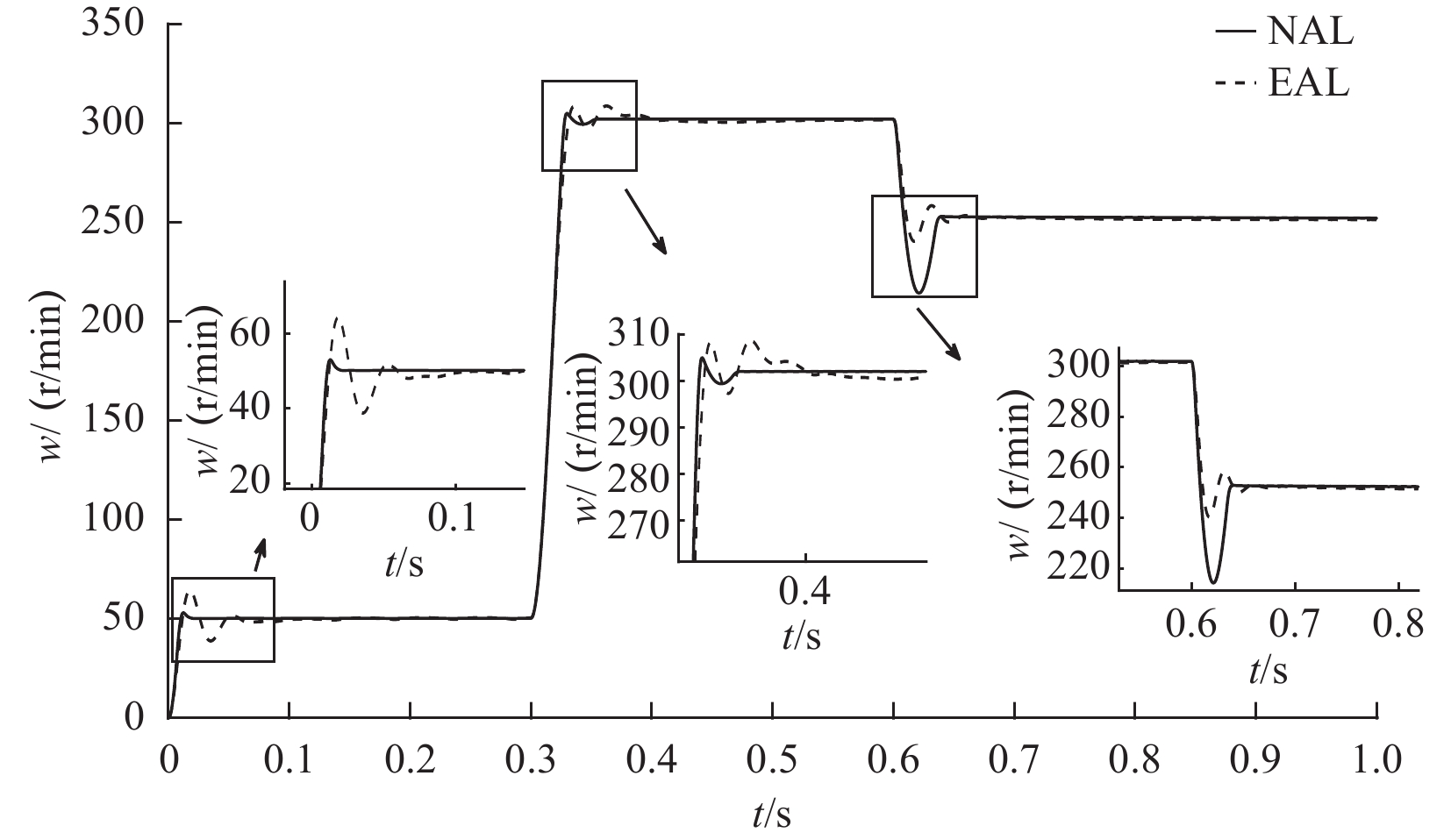
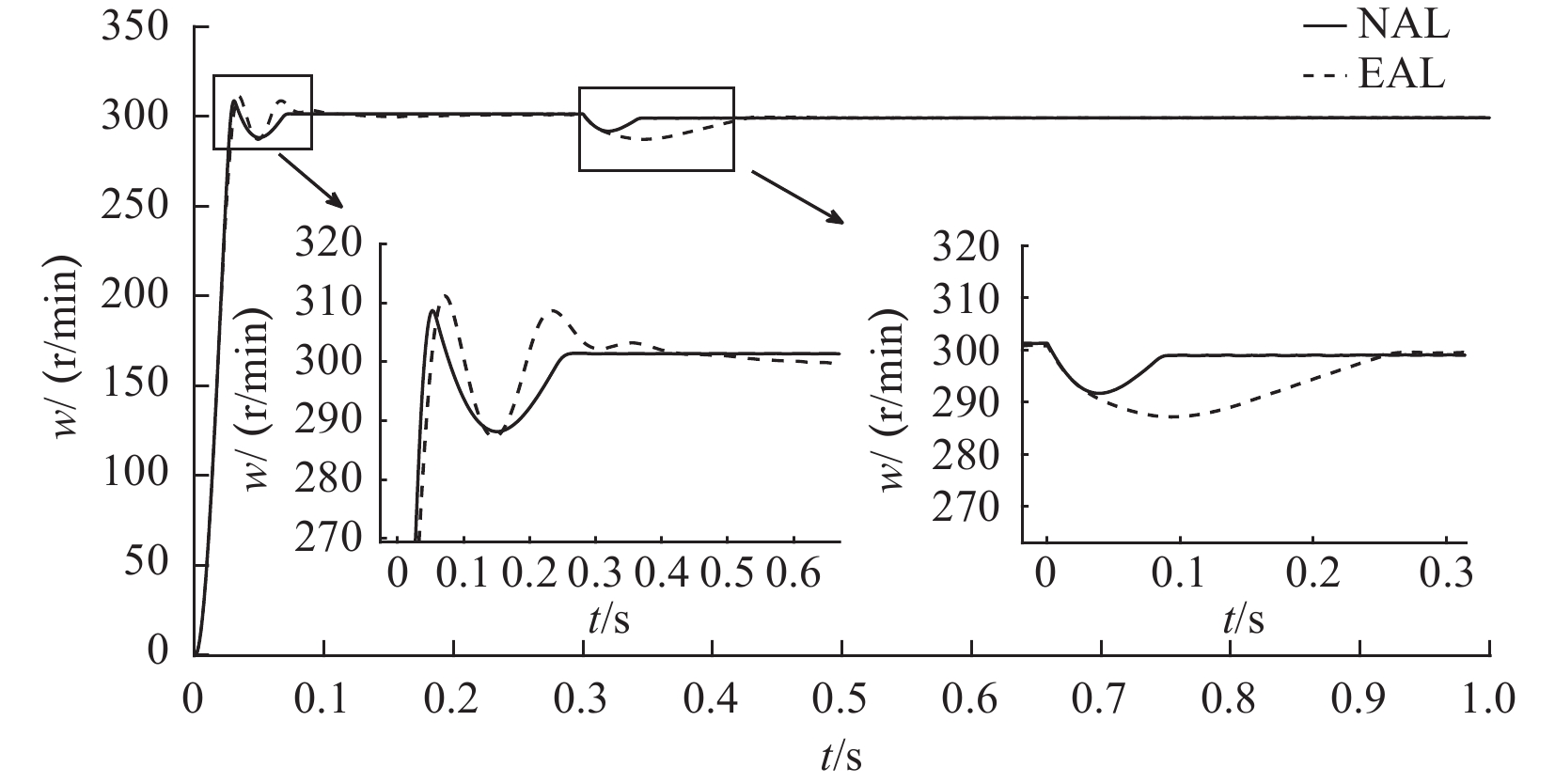
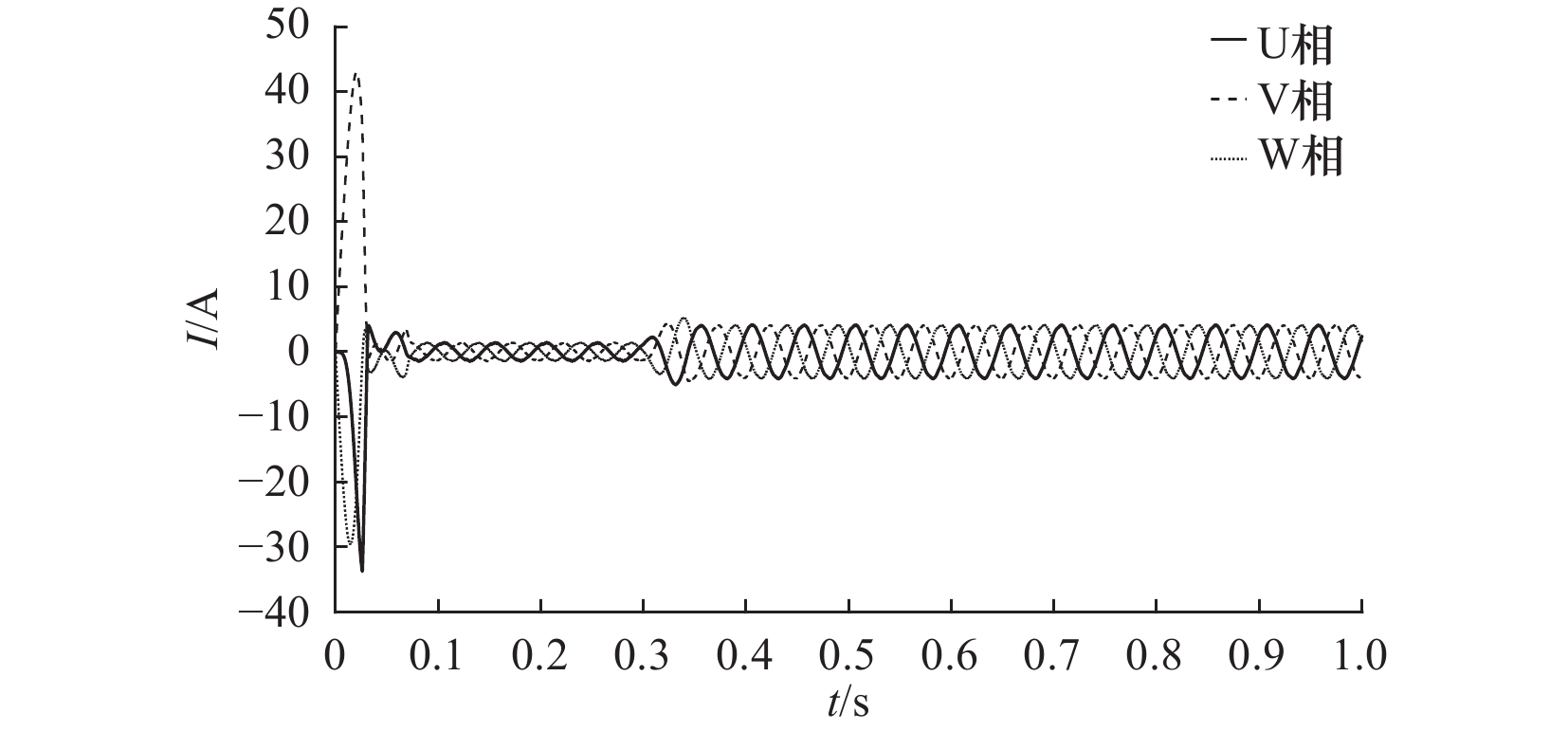
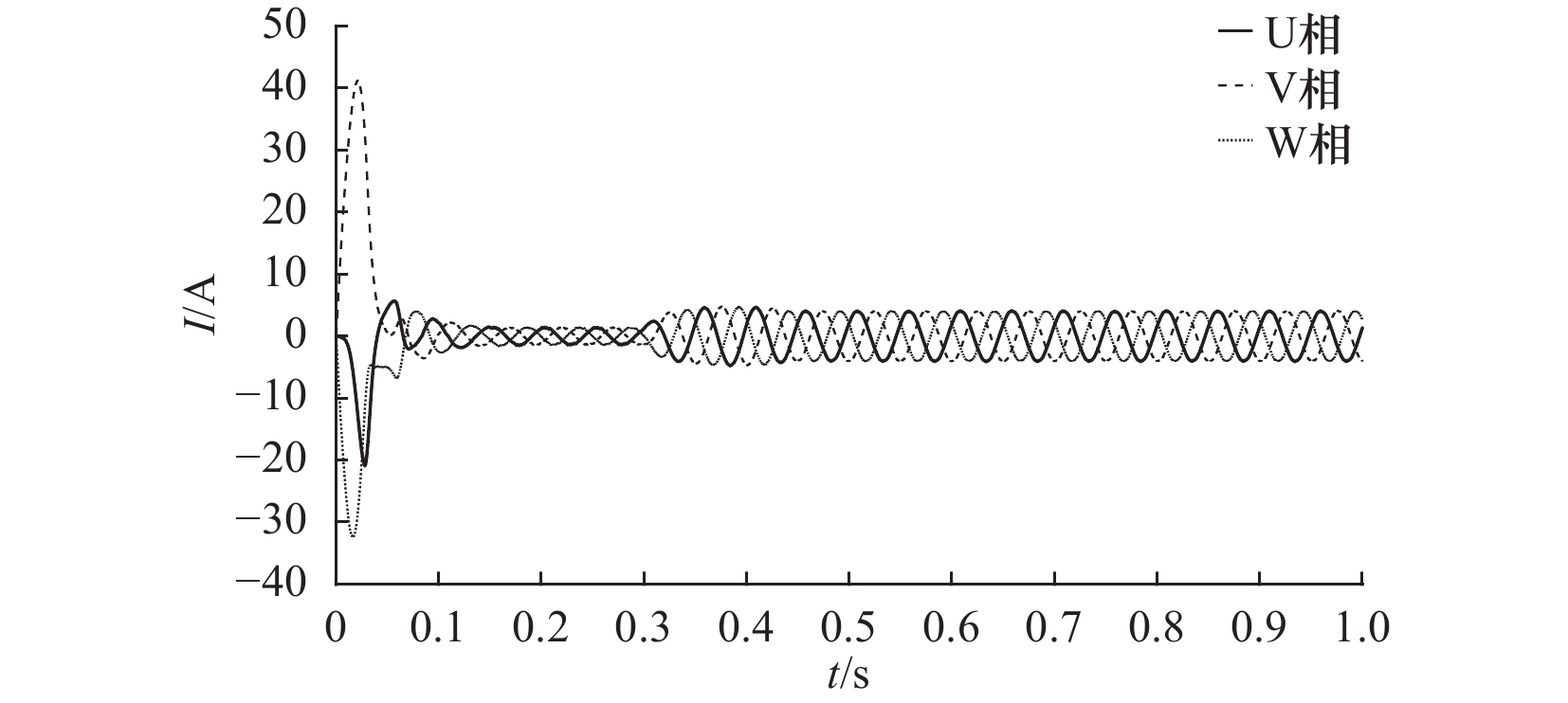
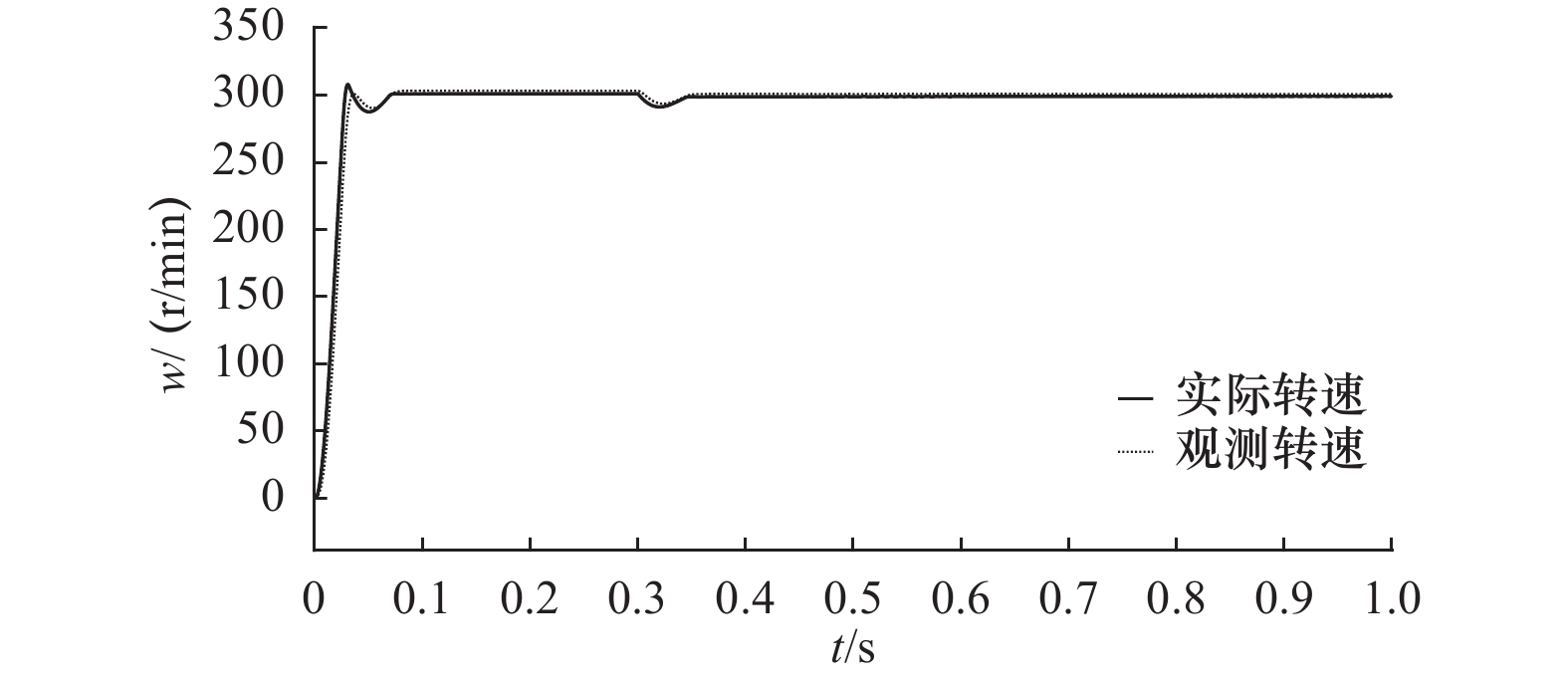
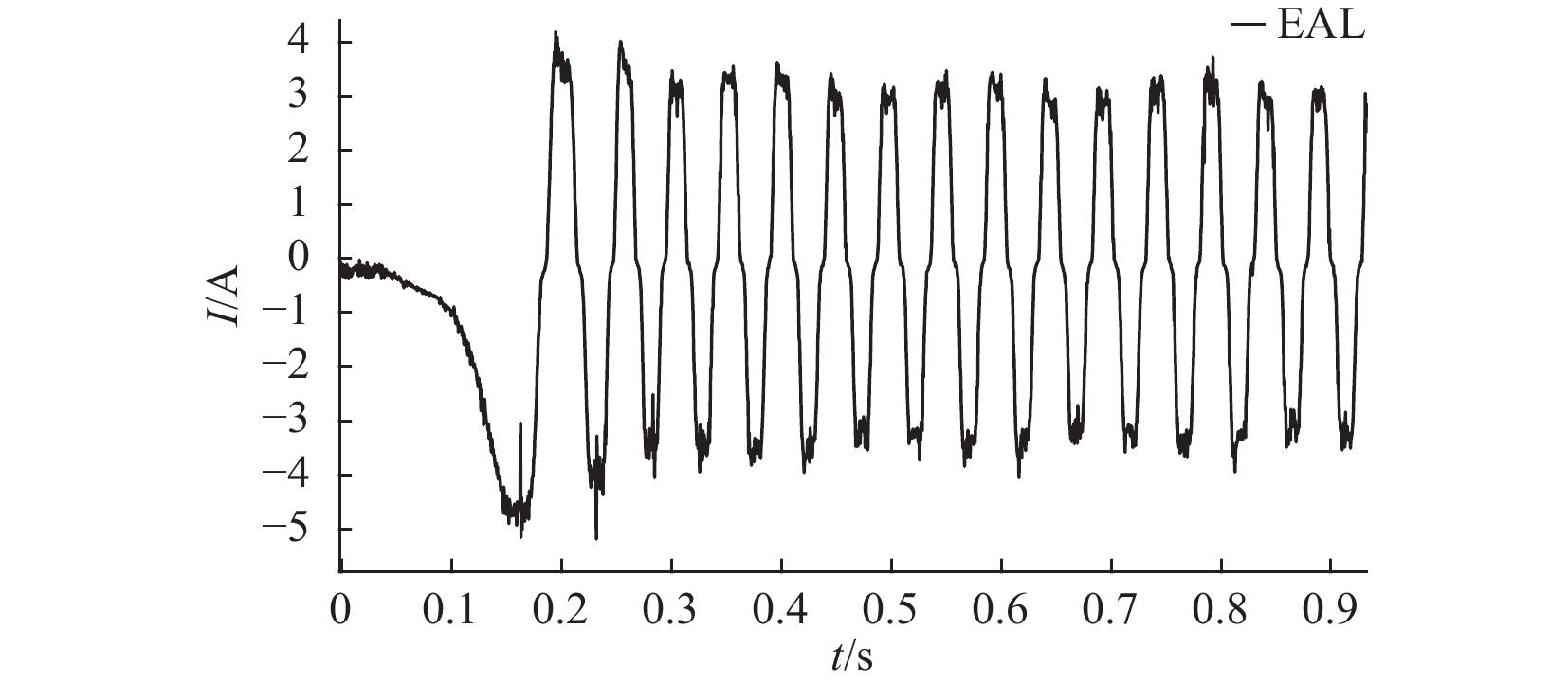
摘要: 为了提高永磁同步电机(PMSM)伺服控制系统的响应速度和鲁棒性,文章提出了一种基于终端滑模的永磁同步电机控制方法。首先对传统滑模面收敛性进行分析,引入了非奇异终端滑模面;其次在传统趋近律的基础上提出了一种新型趋近律,并设计了基于新型的趋近律的电流-转速控制器;最后设计了滑模观测器对电机存在的扰动进行前馈补偿,并进行转速观测。通过软件仿真和实验证明,所提出的新型控制算法较好地抑制了永磁同步电机在接近平衡点时的抖振问题,且具有较低的超调量、良好的抗扰动能力和较快的响应速度,验证了所提方法的可行性和有效性。Abstract: In order to improve the response speed and robustness of permanent magnet synchronous motor (PMSM) servo control system, a control method based on terminal sliding mode is proposed in this paper. Firstly, the convergence of traditional sliding mode surface is analyzed, and the non-singular terminal sliding mode surface is introduced. Secondly, a new approach law is proposed on the basis of the traditional approach law, and a current-speed controller based on the new approach law is designed. Finally, a sliding mode observer is designed to compensate the disturbance and observe the speed of the motor.The new control algorithm proposed has been demonstrated through software simulation and experimental verification to effectively suppress the oscillation issue of the permanent magnet synchronous motor when approaching the equilibrium point, and it has a lower overshoot, good disturbance rejection capability, and faster response speed, confirming the feasibility and effectiveness of the proposed method.
-
表 1 电机参数表
参数名称 参数值 定子电阻$ {R}_{S} $/$ \mathrm{\Omega } $ 0.116 电感L/mH 4.28 永磁体磁链$ {\varphi }_{f} $/Wb 1.235 转动惯量J/(kg·m2) 1.96 摩擦系数B/(N·m·s/rad) 0.008 极对数 4  下载: 导出CSV
下载: 导出CSV
-
[1] Aydin M ,Gulec M . A new coreless axial flux interior permanent magnet synchronous motor with sinusoidal rotor segments[J]. IEEE Transactions on Magnetics,2016,52(7):1-4. [2] 唐任远. 现代永磁电机理论与设计[M]. 北京:机械工业出版社,2016. [3] 张祺琛,刘细平,王方凯文,等. 基于改进滑模观测器的永磁同步电机无传感器控制[J]. 组合机床与自动化加工技术,2022(1):85-88,93. [4] 刘畅,宋桂英,杨博伟,等. PMSM调速系统的新型指数趋近律滑模控制[J]. 安徽大学学报:自然科学版,2022,46(6):57-66. [5] 王辉航,赵朝会,万东灵,等. 基于非奇异快速终端滑模的永磁同步电机转速和电流控制[J]. 电机与控制应用,2018,45(11):28-33,65. doi: 10.3969/j.issn.1673-6540.2018.11.005 [6] 王颖,徐建英,陈官如,等. 基于快速趋近律的永磁同步电机滑膜控制[J]. 辽宁科技大学学报,2018,41(1):46-51. [7] 杨永杰,刘旭东. 基于改进滑模方法的永磁同步电机宽速范围无位置传感器控制[J]. 电机与控制应用,2022,49(7):7-13. [8] 李赓. 基于改进超螺旋算法的永磁同步电机速度控制研究[D]. 桂林:桂林理工大学,2020. [9] 何宗卿,文定都,邓凯. 改进无迹卡尔曼滤波的无位置传感器永磁同步电机控制[D]. 株洲:湖南工业大学,2022. [10] 杨帆,赵希梅,金鸿雁,等. 基于无参数PMSM的自适应有限集模型预测控制[J]. 中国电机工程学报,2023,43(22):8935-8944. [11] 杨宗军,王莉娜. 表贴式永磁同步电机的多参数在线辨识[J]. 电工技术学报,2014,29(3):111-118. doi: 10.3969/j.issn.1000-6753.2014.03.015 [12] 肖曦,许青松,王雅婷,等. 基于遗传算法的内埋式永磁同步电机参数辨识方法[J]. 电工技术学报,2014,29(3):21-26. doi: 10.3969/j.issn.1000-6753.2014.03.003 [13] 陈国真,田亚南. 基于滑模控制的永磁同步电机模糊调速系统[J]. 电机与控制应用,2022,49(3):28-32. doi: 10.12177/emca.2021.195 [14] 康尔良,贺建智,王一琛. 永磁同步电机非奇异终端滑模控制器的设计[J]. 电机与控制学报,2021,25(12):58-64. -

 下载:
下载:





 点击查看大图
点击查看大图
图(14) / 表(1)
计量
- 文章访问数: 152
- HTML全文浏览量: 13
- PDF下载量: 50
- 被引次数: 0


