

Research on GMAW seam tracking system based on arc sensor
-
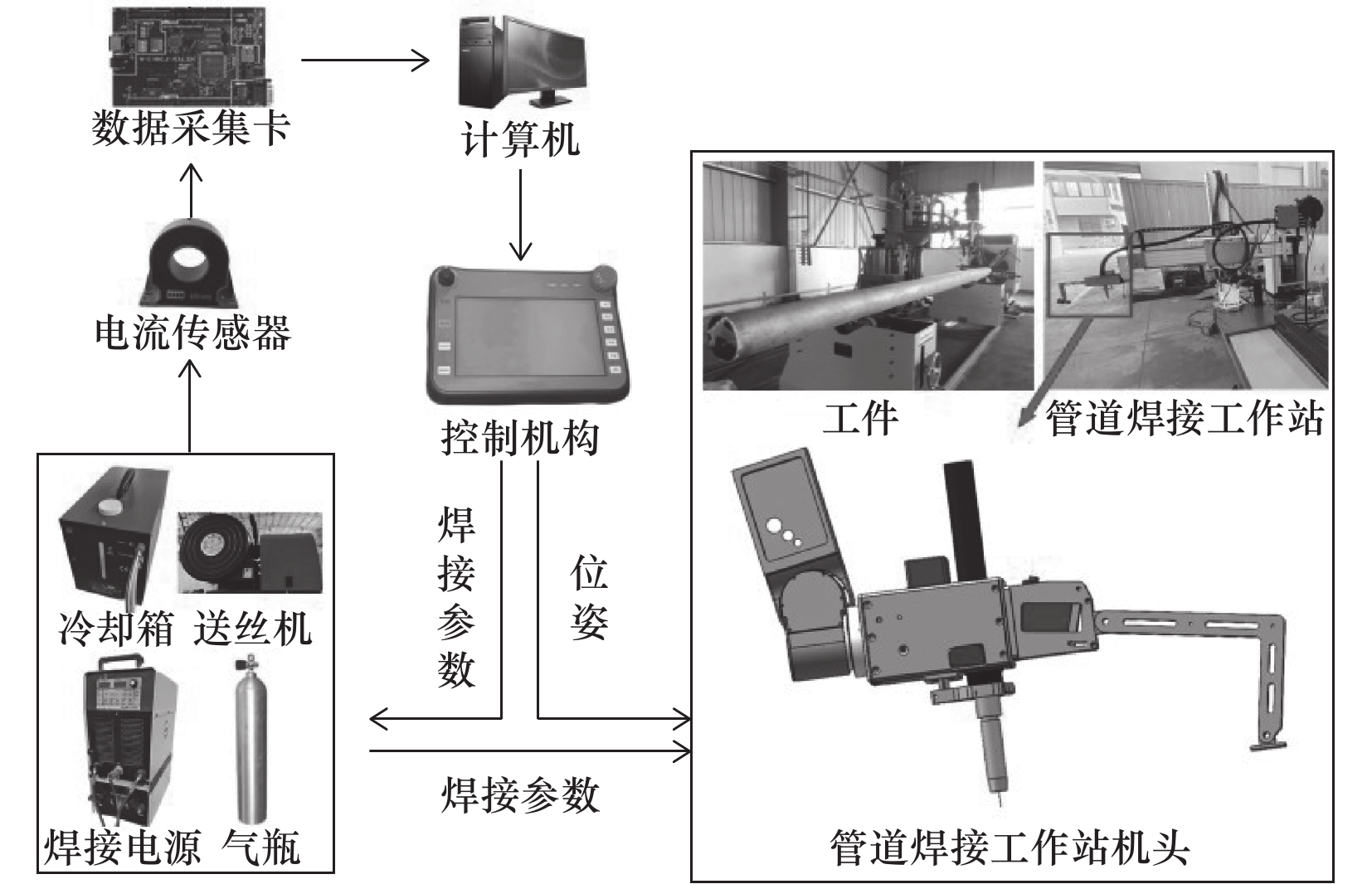
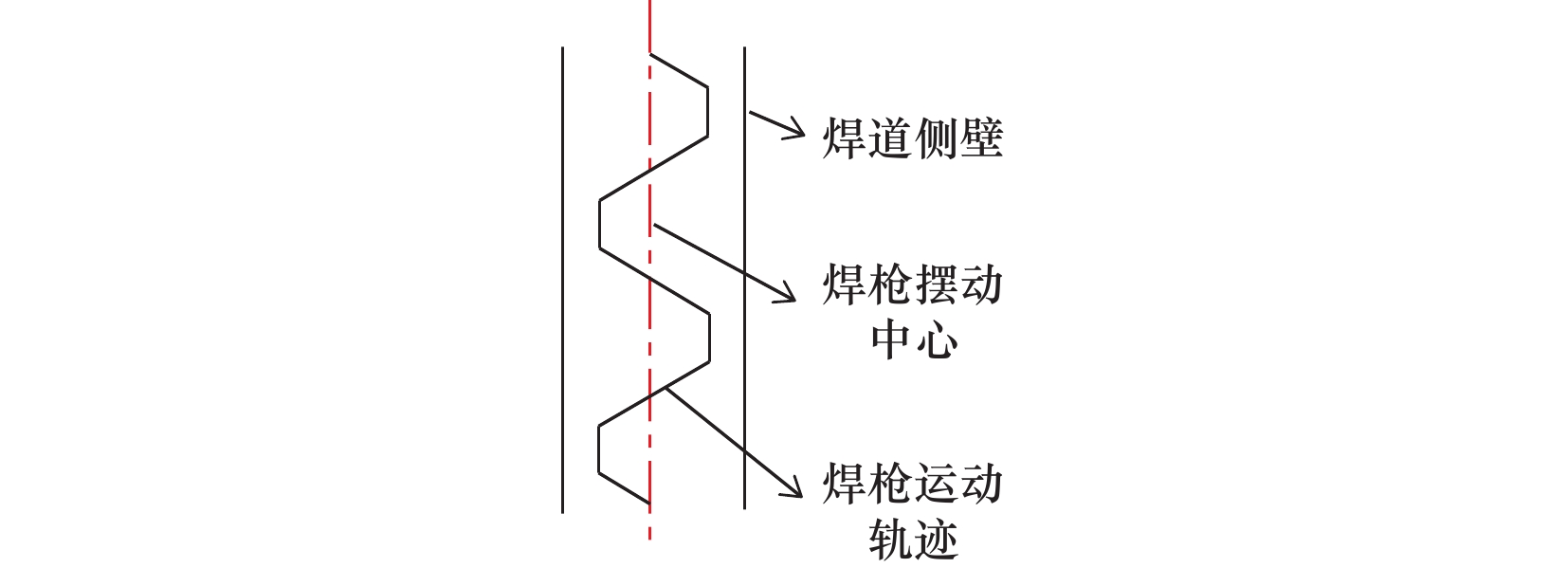
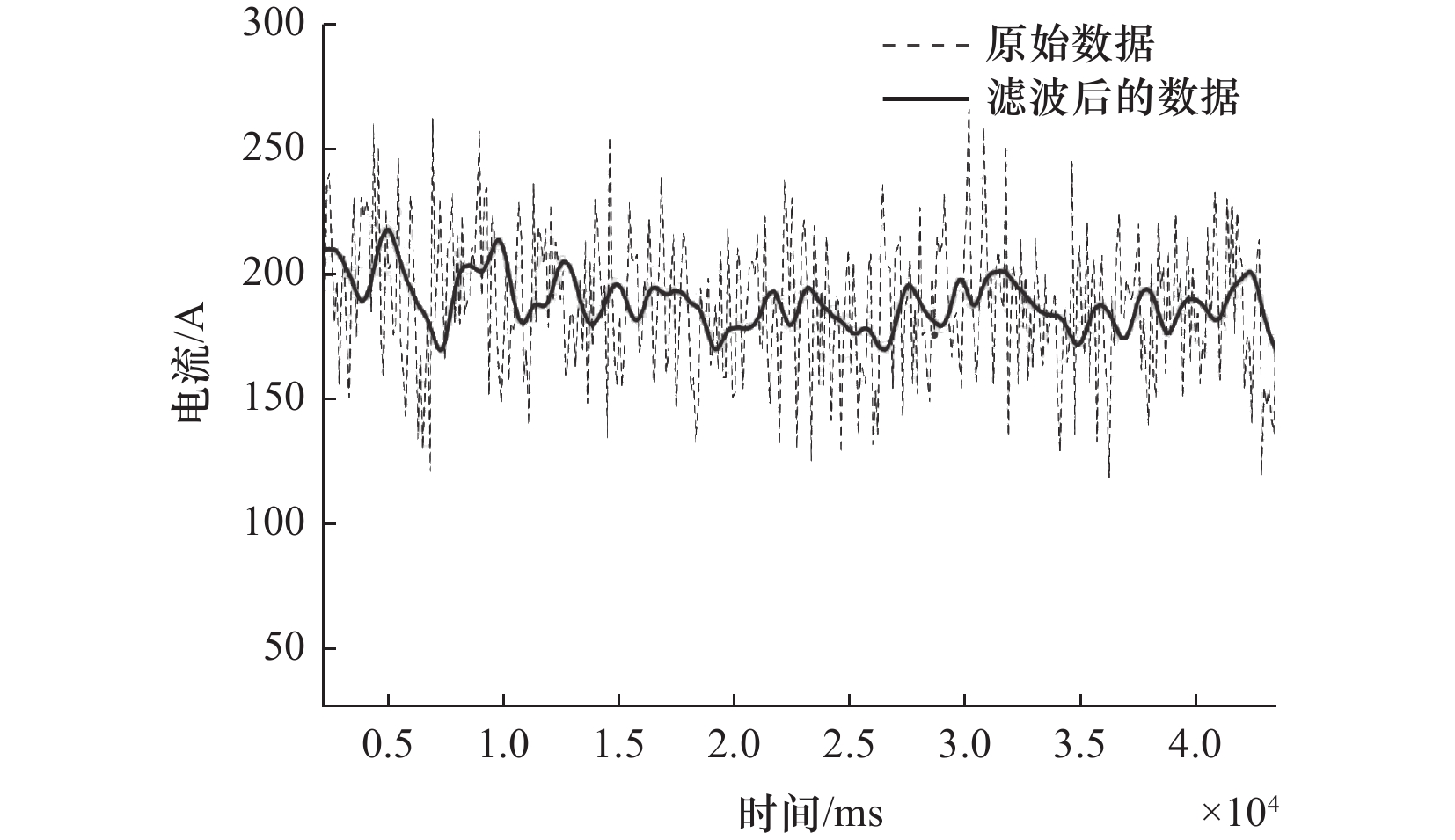
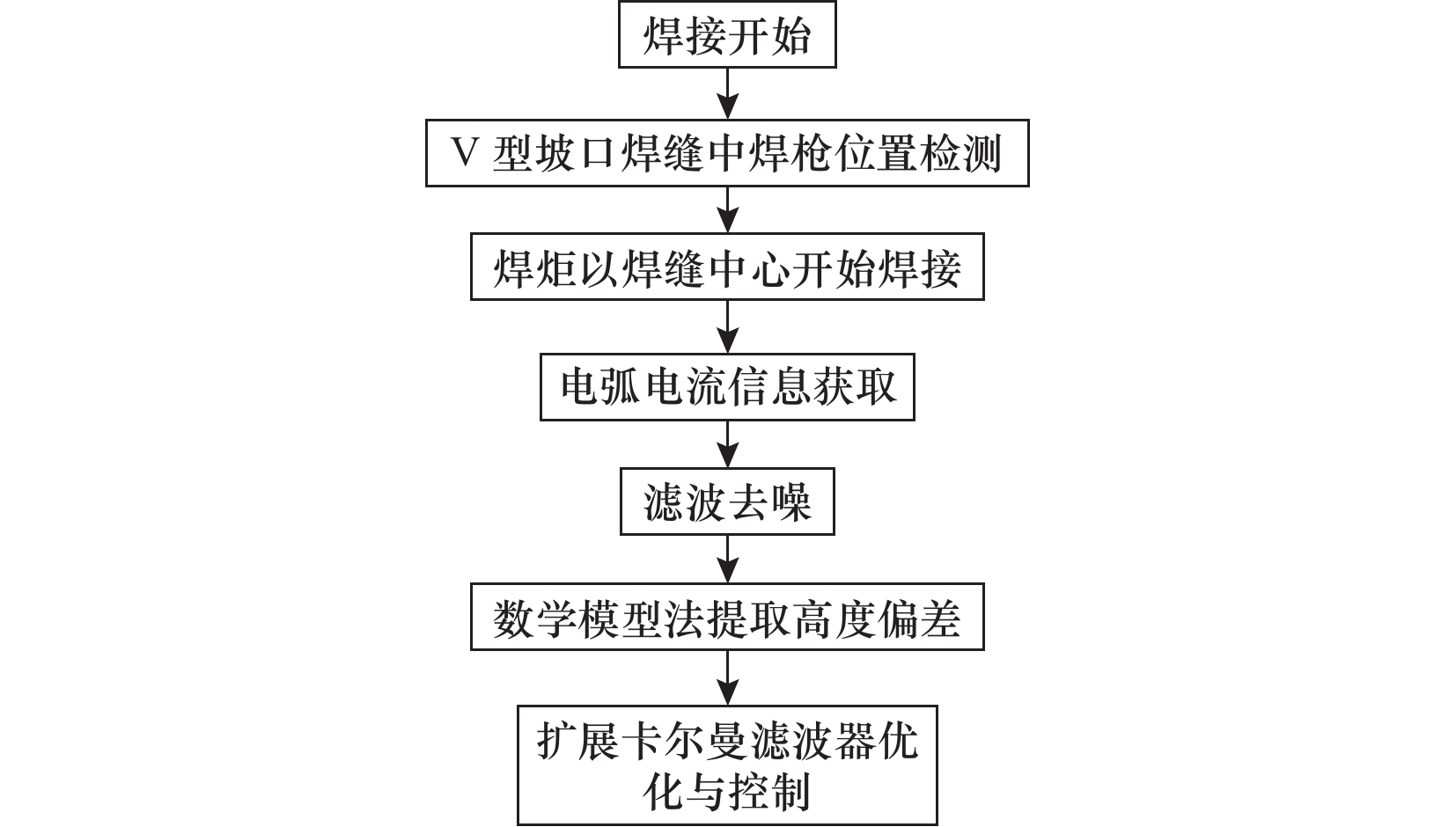
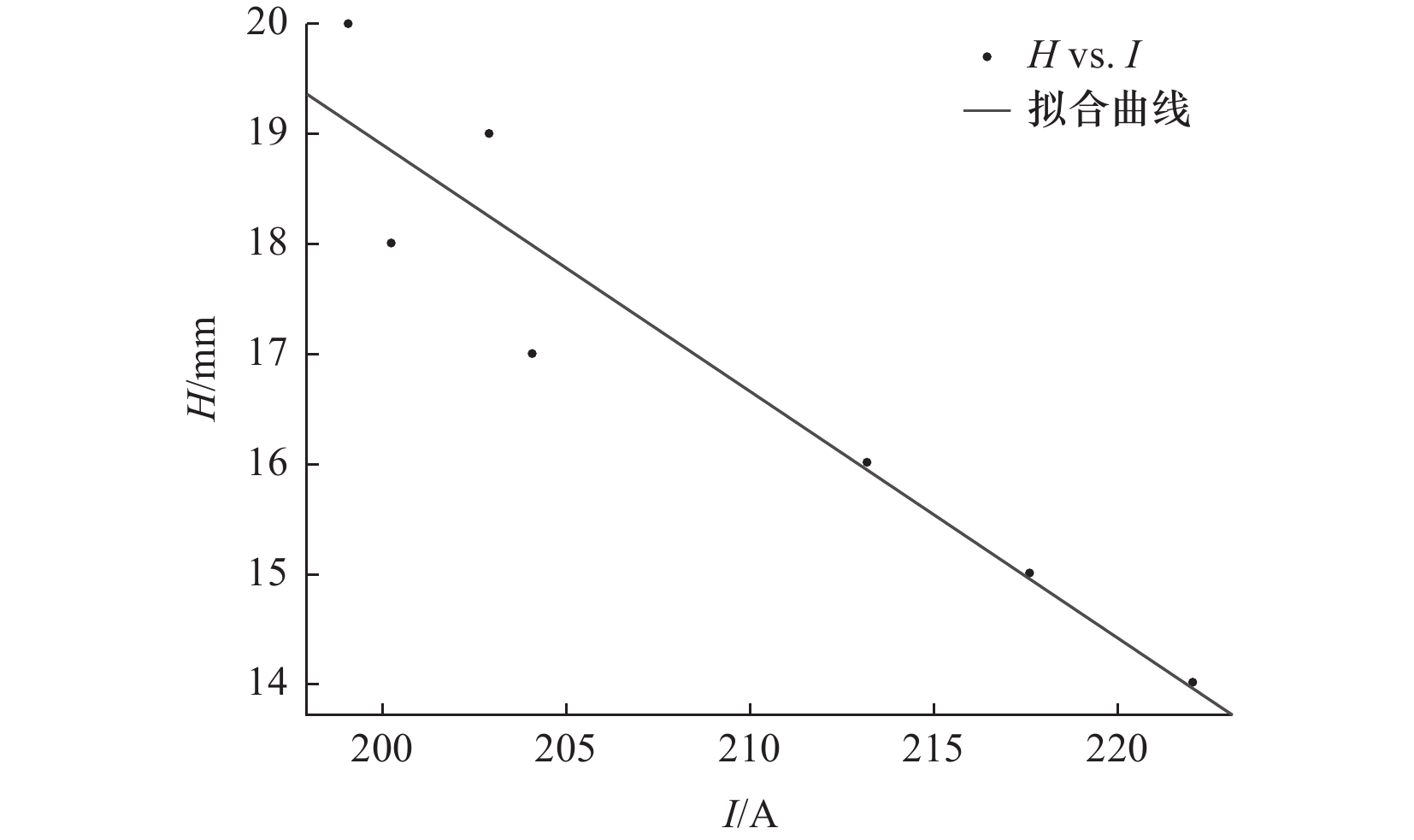
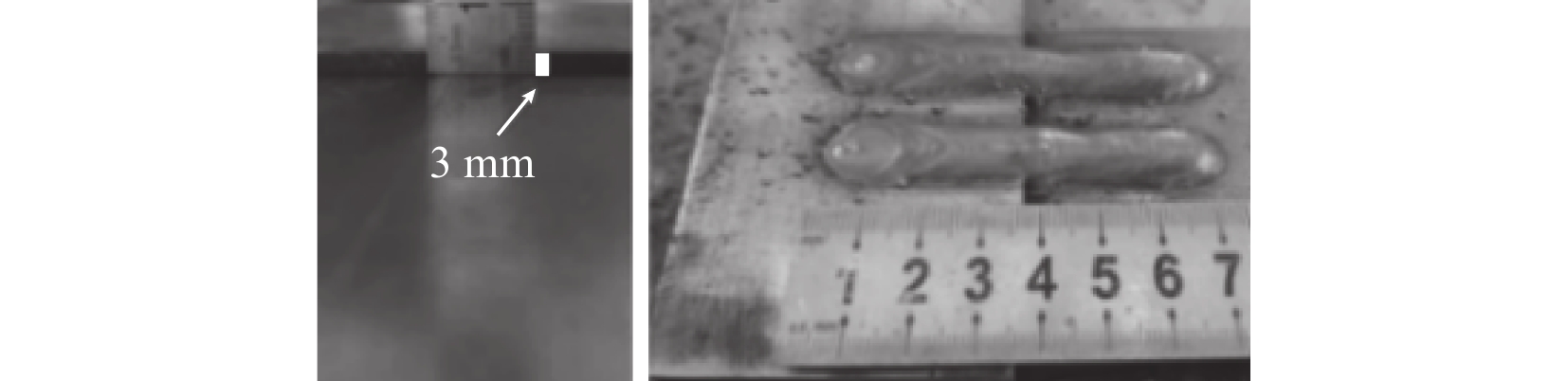
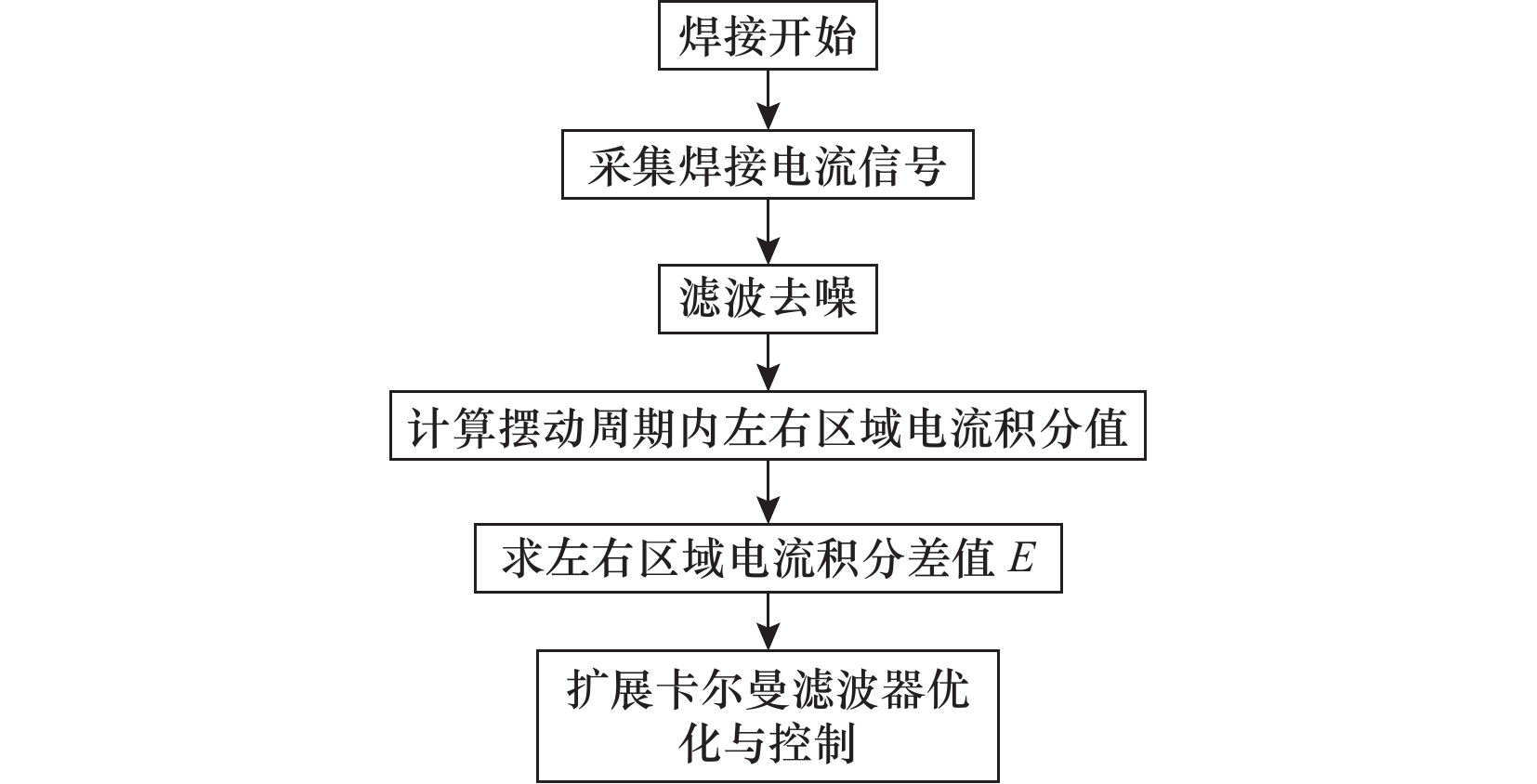
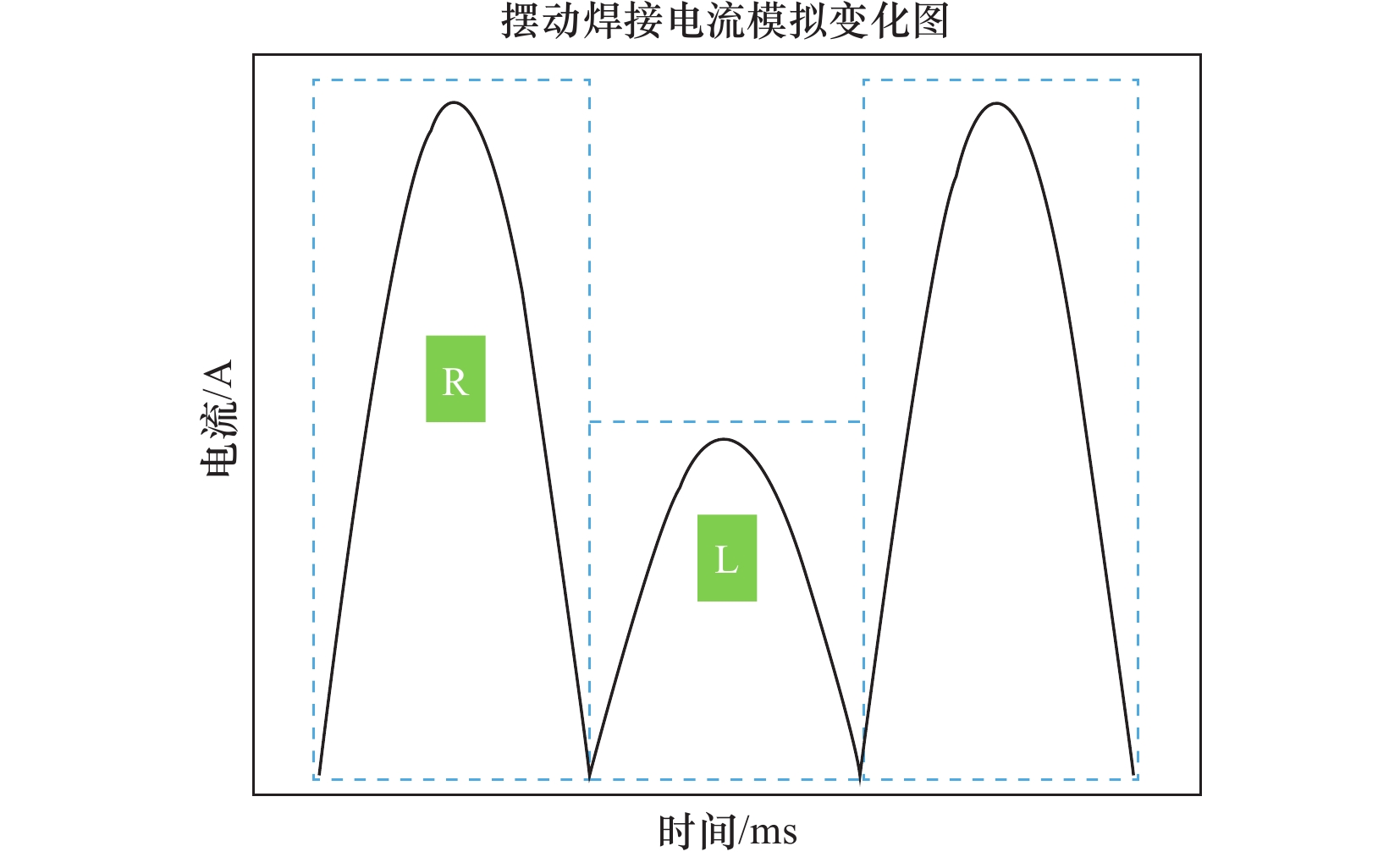
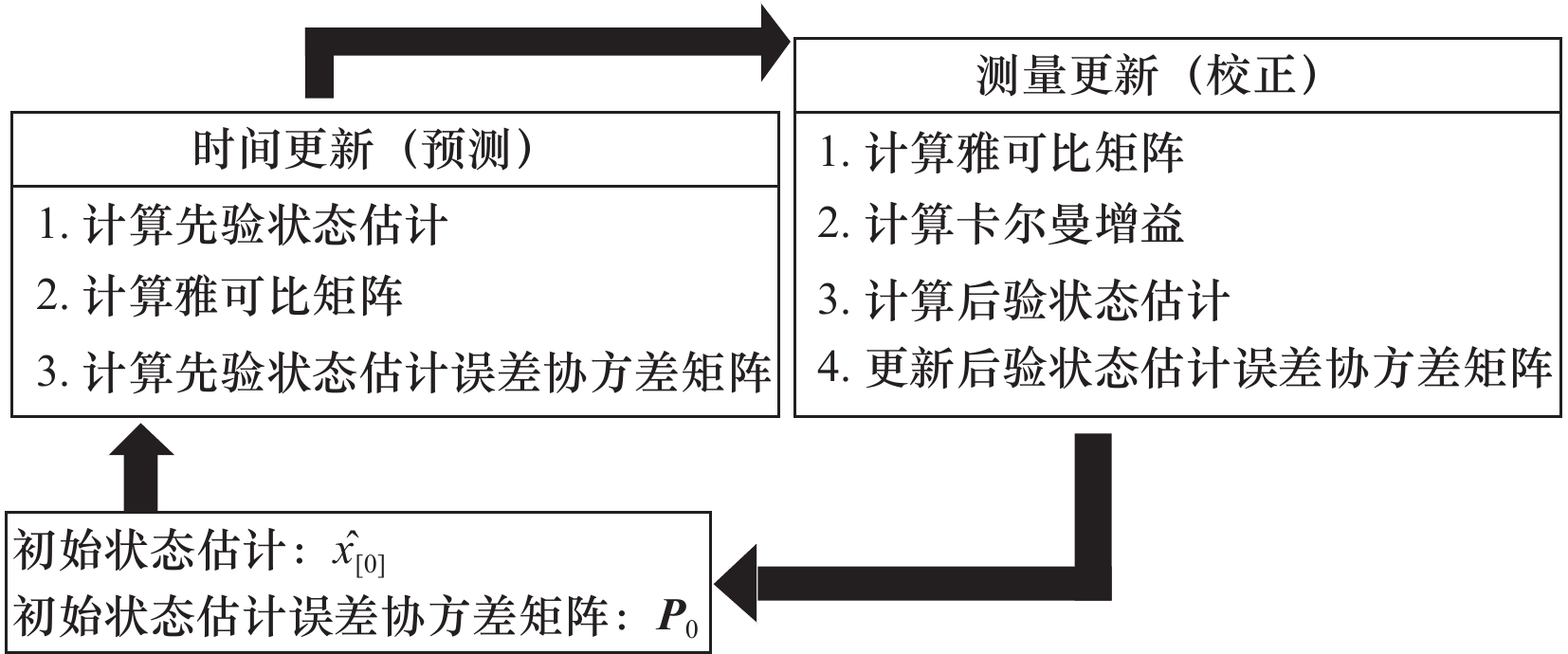
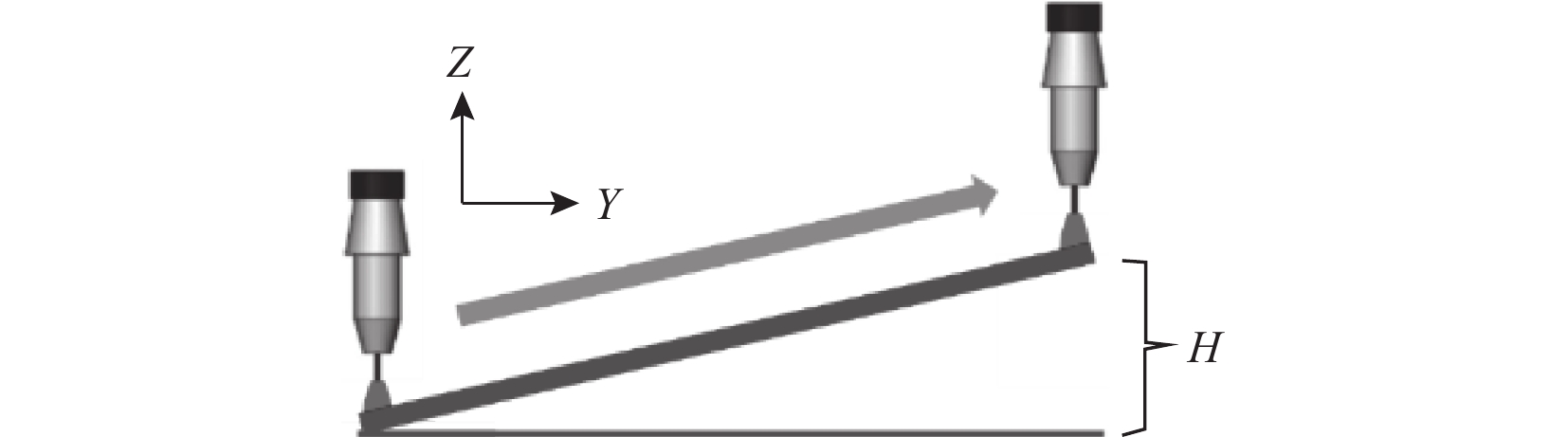
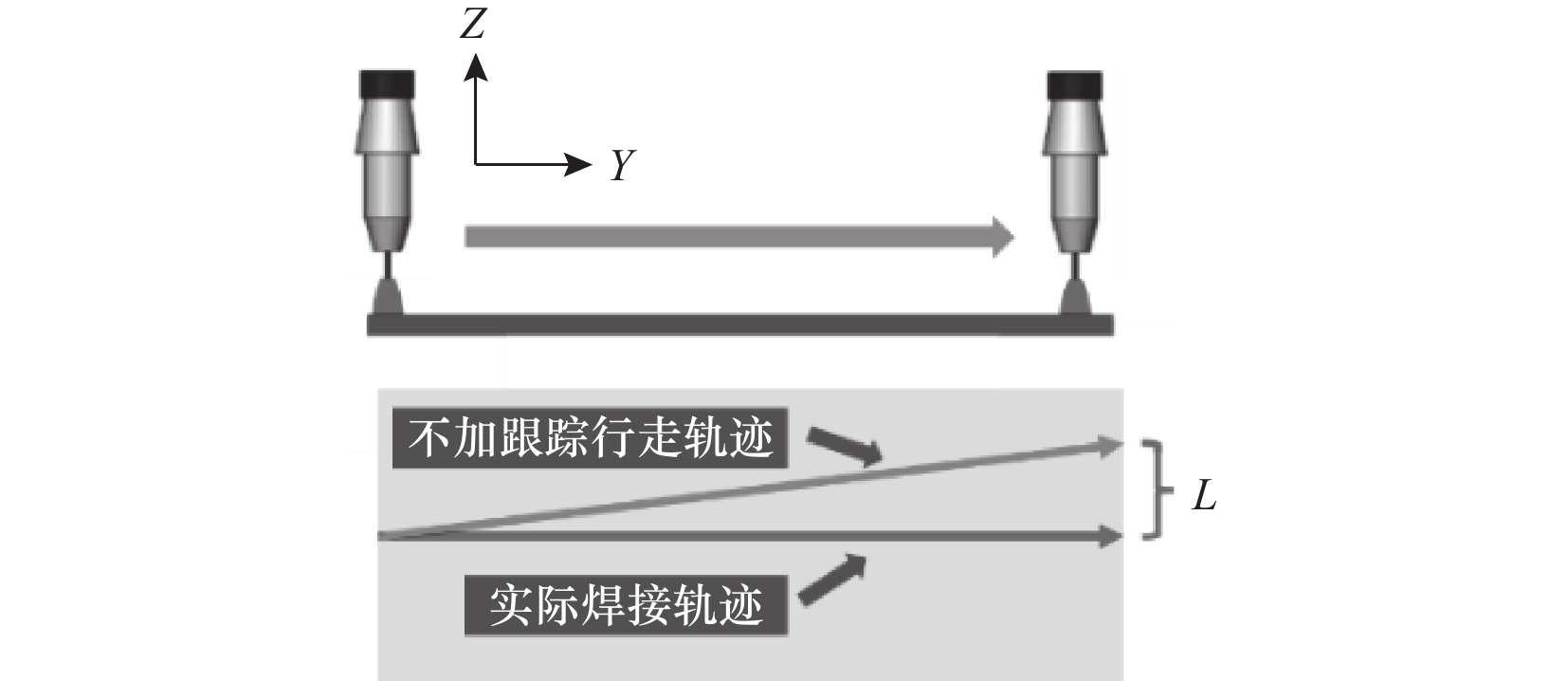
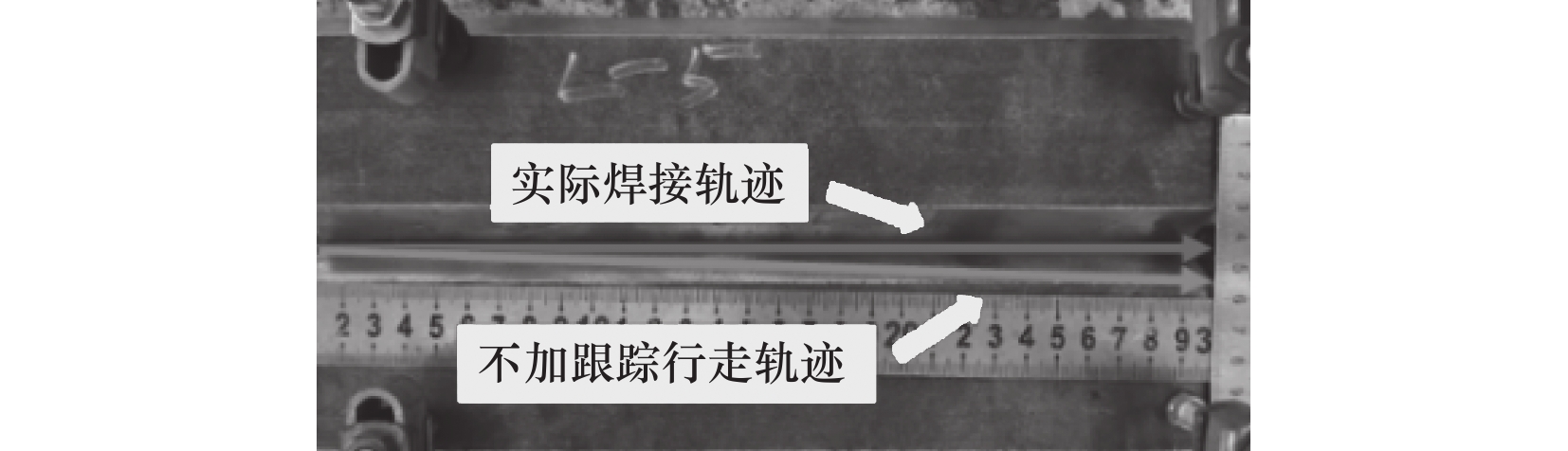
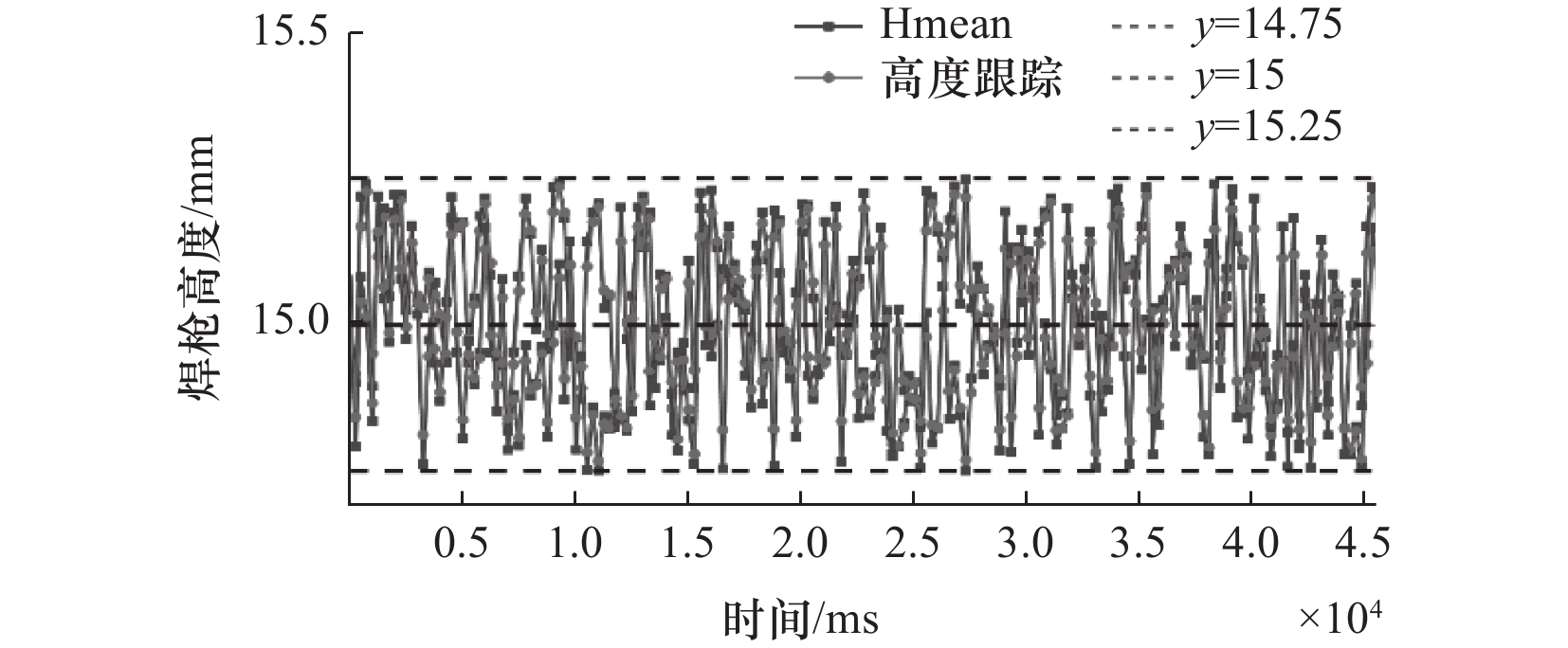
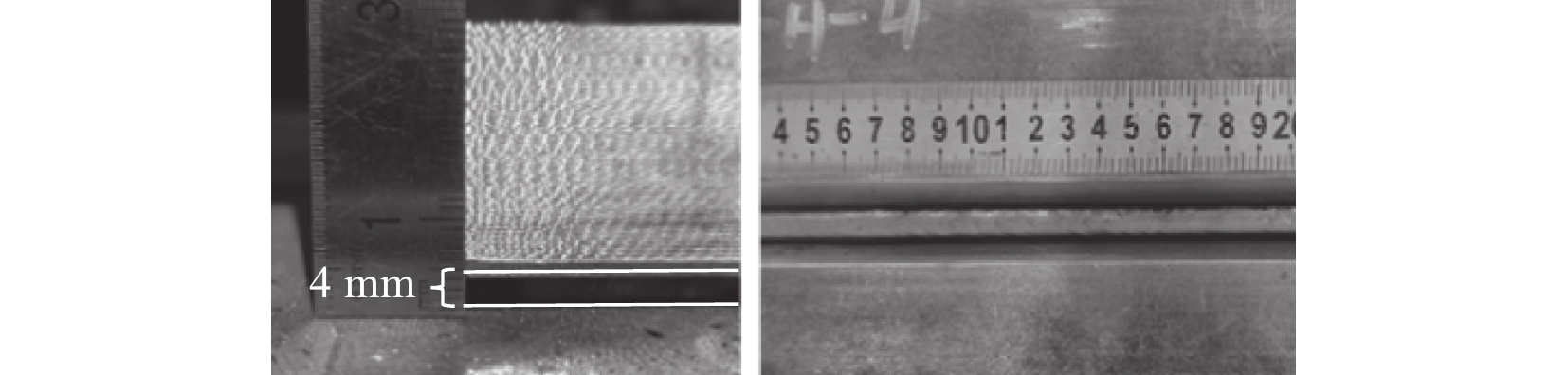
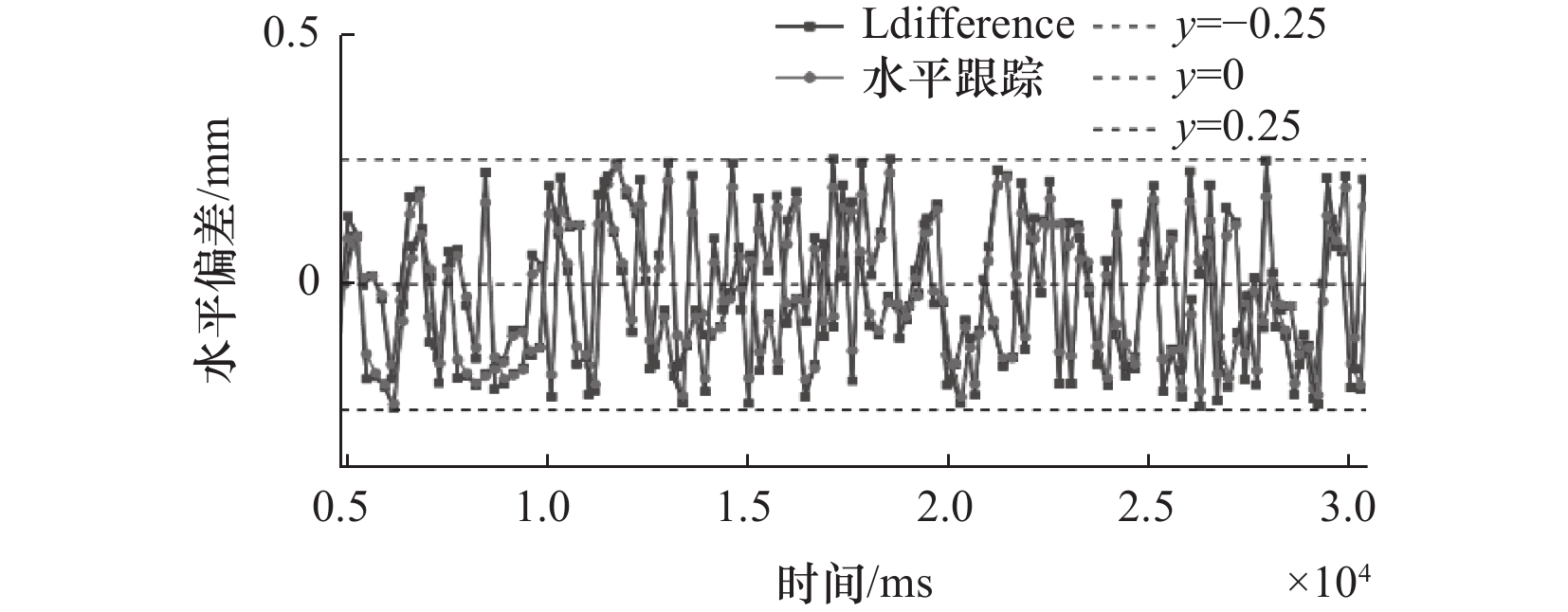
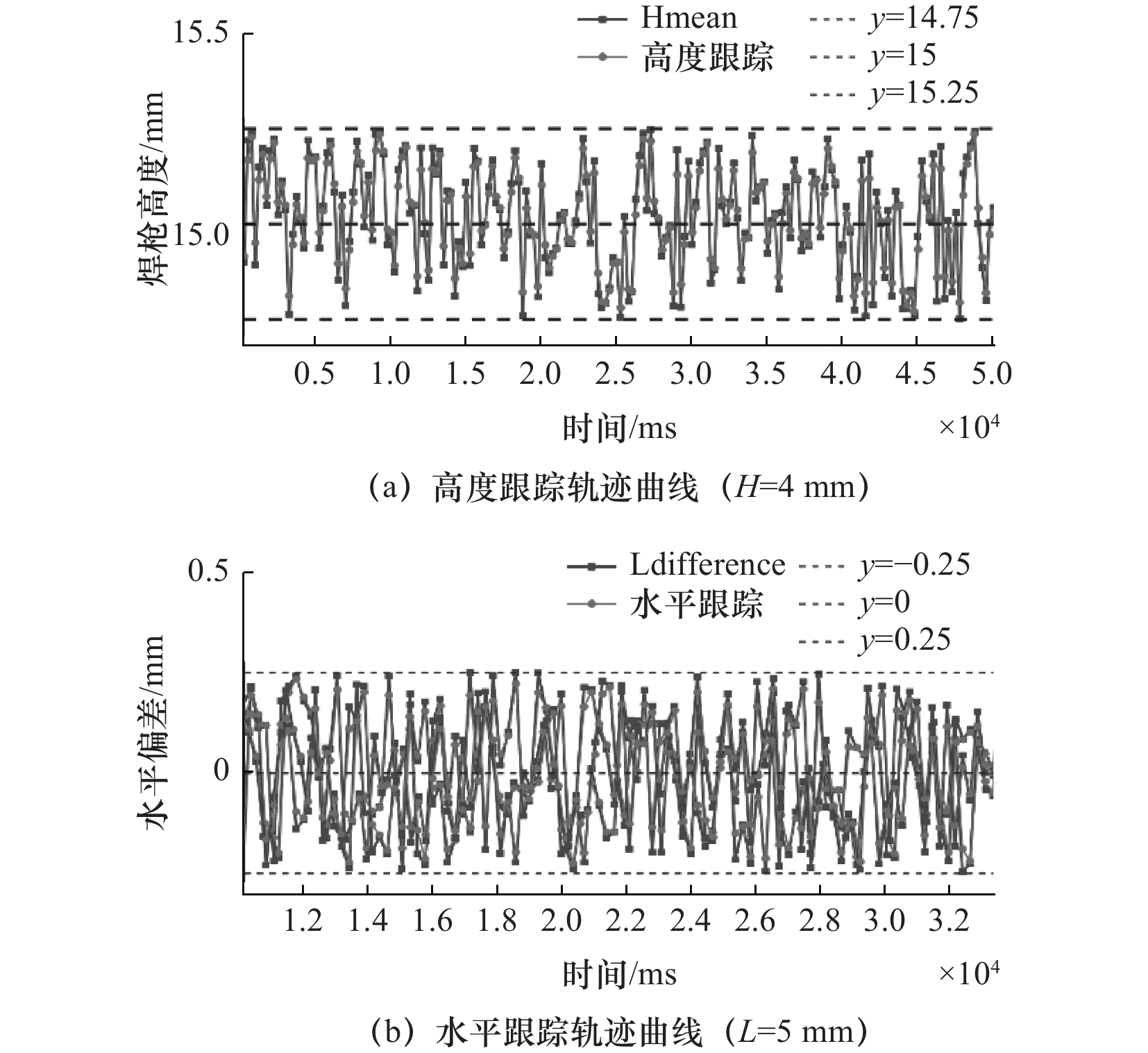
摘要: 熔化极气体保护电弧焊(gas metal arc welding,GMAW)焊接过程存在惯性大、时滞大等非线性特征以及不确定的干扰因素。为了提高焊接质量,文章提出了一种基于扩展卡尔曼滤波器(extended kalman filter,EKF)算法的焊缝实时跟踪技术,采用霍尔电流传感器来捕捉实时焊接电流。为了实现焊枪摆动中心始终对准焊缝中心,文章通过有限长单位冲激响应滤波器(finite impulse response,FIR)对采集的电流进行滤波,并建立提取焊枪高度和水平偏差的数学模型,采用EKF实现控制焊枪。通过在有垂直和水平方向偏差的焊缝上进行实验验证,结果跟踪精度可达到±0.25 mm,所以该方法可满足机器人实时跟踪的要求。Abstract: The welding process of gas metal arc welding(GMAW) has nonlinear characteristics such as large inertia, large time delay and uncertain interference factors. In order to improve welding quality, a real-time welding seam tracking technology based on extended kalman filter(EKF) algorithm is proposed in this paper. Hall current sensor is used to capture real-time welding current. In order to realize that the swinging center of the welding torch is always aligned with the weld center, this paper filters the collected current through finite impulse response(FIR), establishes a mathematical model for extracting the height and horizontal deviation of the welding torch, and uses EKF to control the welding torch. Through the experimental verification on the weld with vertical and horizontal deviations, the tracking accuracy can reach ±0.25 mm, so the method can meet the requirements of real-time robot tracking.
-
Key words:
- extended kalman filter /
- seam tracking /
- FIR filter /
- height deviation /
- horizontal deviation
-
[1] 葛佳棋,万升云,汤旭祥,等. GMAW自动焊工艺参数对焊缝成形影响研究[J]. 金属加工:热加工,2022(6):45-48. [2] 刘越,刘念,赖长川,等. 基于正弦摆焊的弧焊机器人焊缝跟踪系统的研究[J]. 机械与电子,2016,34(10):76-80. doi: 10.3969/j.issn.1001-2257.2016.10.020 [3] 田耀华,薛瑞雷,吴立斌,等. 基于模糊PID的焊炬高低跟踪系统研究[J]. 制造技术与机床,2023(8):113-118. [4] Liu C F,Shen J Q,Hu S S,et al. Seam tracking system based on laser vision and CGAN for robotic multi-layer and multi-pass MAG welding[J]. Engineering Applications of Artificial Intelligence,2022,116:105377. doi: 10.1016/j.engappai.2022.105377 [5] 李伟鹏. 基于磁控传感与滞环控制的焊缝跟踪关键技术研究[D]. 湘潭:湘潭大学,2020. [6] 高延峰,张华,毛志伟. 以旋转电弧为传感器的移动机器人角焊缝跟踪[J]. 机械工程学报,2009,45(9):64-71. [7] 洪波,杨学道,何荣拓,等. 磁控电弧焊缝跟踪传感信号的实时小波降噪方法[J]. 焊接学报,2013,34(7):5-8. [8] 张锋,王新升,李岩,等. 脉冲焊接工艺摆动电弧焊缝跟踪技术[J]. 焊接,2018(2):39-42. [9] Fabry C,Pittner A,Rethmeier M. Design of neural network arc sensor for gap width detection in automated narrow gap GMAW[J]. Weld World,2018,62:819-830. doi: 10.1007/s40194-018-0584-8 [10] Lei T,Wu C,Yu H. Electric arc length control of circular seam in welding robot based on arc voltage sensing[J]. IEEE Sensors Journal,2022,22(4):3326-3333. doi: 10.1109/JSEN.2022.3143113 [11] 曹学鹏,脱帅华,张弓,等. 焊接机器人焊缝跟踪方法及路径规划研究[J]. 工程科学与技术,2022,54(2):196-204. -

 下载:
下载:



 点击查看大图
点击查看大图

图(20) / 表(2)
计量
- 文章访问数: 24
- HTML全文浏览量: 4
- PDF下载量: 8
- 被引次数: 0


