

Research on active disturbance rejection control of fast tool positioning table based on piezoelectric drive
-
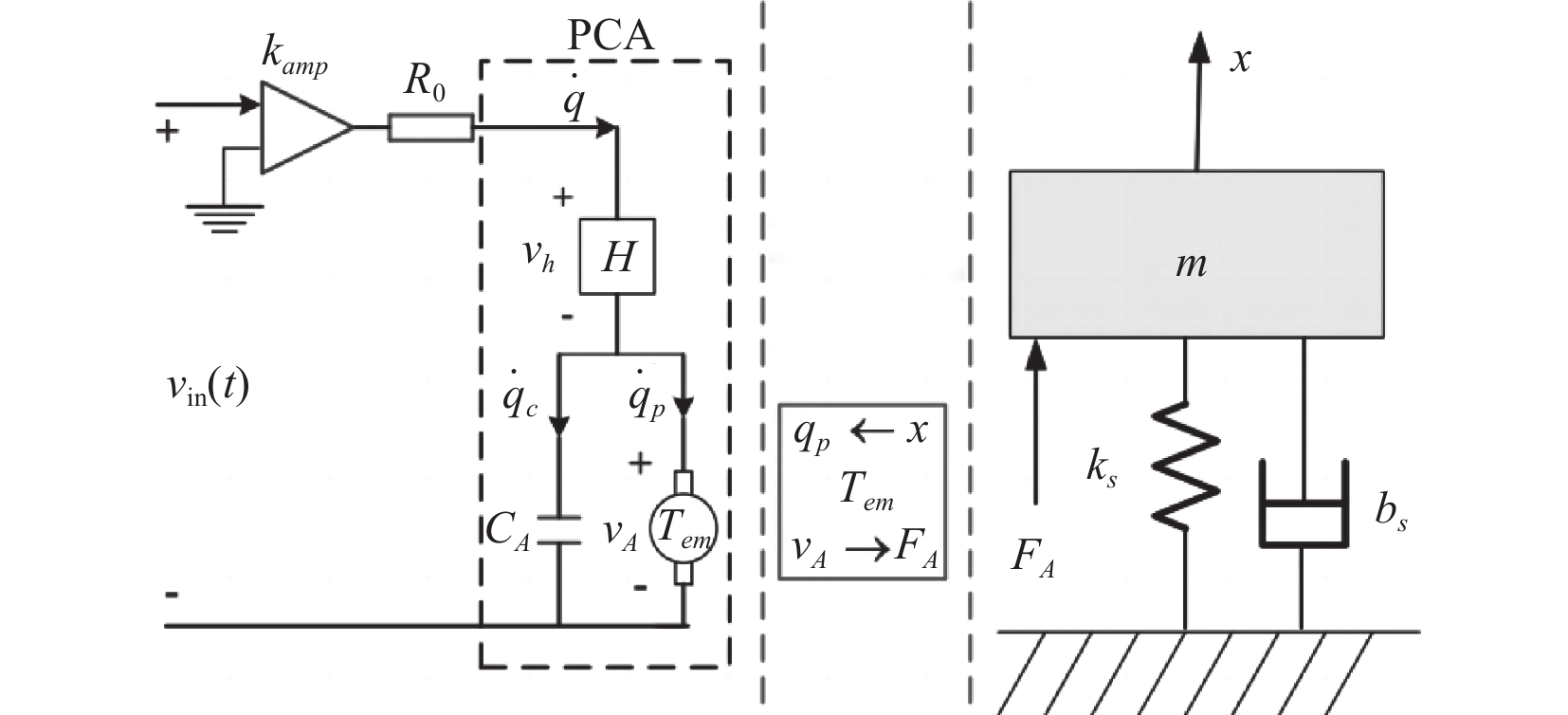
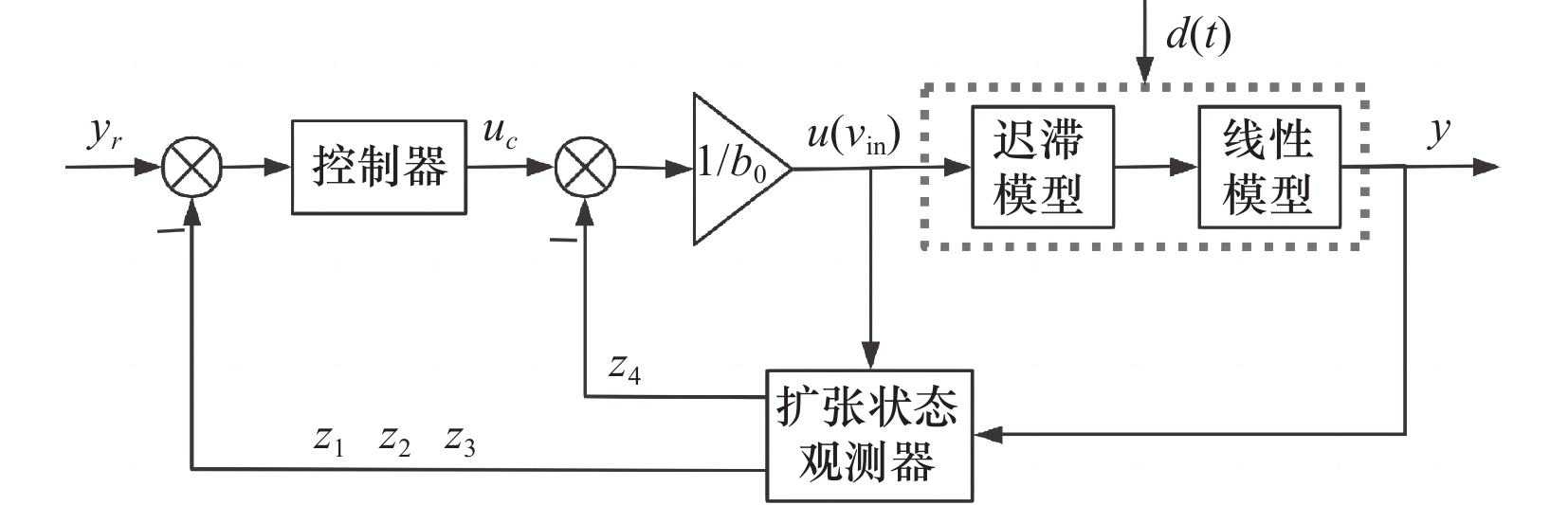
摘要: 针对压电驱动器输入电压与输出位移的动态迟滞特性,采用基于Prandtl-Ishlinskii的压电动态迟滞模型,实现了对刀具定位台的精确控制。实验分别采用逆模型前馈补偿控制和自抗扰控制方法对定位台控制系统进行测试,结果表明在单频输入信号下,采用自抗扰控制算法的系统均方根误差较逆模型前馈控制下降了1.137~1.137 5 µm;系统相对误差有明显下降。结论表明自抗扰控制成功减小了定位台的迟滞特性,提高了控制精度,较逆模型前馈补偿控制有更好的优越性。
-
关键词:
- 快速刀具定位台 /
- Prandtl-Ishlinskii模型 /
- 跟踪控制 /
- 迟滞逆模型 /
- 自抗扰控制
Abstract: Aiming at the dynamic hysteresis characteristics of input voltage and output displacement of piezoelectric drivers, a piezoelectric dynamic hysteresis model based on Prandtl-Ishlinskii is used, for precise control of the tool positioning table. The results show that under the single-frequency input signal, the root mean square error of the system using the active disturbance rejection control algorithm is 1.137~1.1375 μm lower than that of the inverse model feedforward control. The relative error of the system has decreased significantly. The results show that the active disturbance rejection control successfully reduces the hysteresis characteristics of the positioning station, improves the control accuracy, and has better advantages than the inverse model feed-forward compensation compensation control. -
表 1 压电驱动的快速刀具定位台的技术参数
参数 数值 驱动电压/V 0~120 开环行程/µm 0~63.159 闭环行程/µm 0~60 开环分辨率/nm 1 闭环分辨率/nm 2.5 闭环线性度/(%) 0.1 静电容量/µF 18 空载谐振频率/kHz 1.6 平台质量/kg 3  下载: 导出CSV
下载: 导出CSV
表 2 定位台PI迟滞模型参数辨识值
参数 数值 参数 数值 参数 数值 参数 数值 $ {r_1} $ 0.10 $ {b_1} $ 0.476 4 $ {r_9} $ 2.00 $ {b_9} $ 0.088 0 $ {r_2} $ 0.15 $ {b_2} $ 0.247 7 $ {r_{10}} $ 3.00 $ {b_{10}} $ 0.016 3 $ {r_3} $ 0.20 $ {b_3} $ 0.052 3 $ {r_{11}} $ 4.00 $ {b_{11}} $ 0.035 1 $ {r_4} $ 0.25 $ {b_4} $ 0.010 6 $ {r_{12}} $ 5.33 $ {b_{12}} $ 0.043 9 $ {r_5} $ 0.50 $ {b_5} $ 0.023 5 $ {r_{13}} $ 10.67 $ {b_{13}} $ 0.019 3 $ {r_6} $ 0.75 $ {b_6} $ 0.041 6 $ {r_{14}} $ 16.00 $ {b_{14}} $ 0.247 1 $ {r_7} $ 1.00 $ {b_7} $ 0.036 0 $ {r_{15}} $ 21.33 $ {b_{15}} $ 0.014 3 $ {r_8} $ 1.50 $ {b_8} $ 0.003 3 $ {r_{16}} $ 26.67 $ {b_{16}} $ 0.401 4
下载: 导出CSV
表 3 定位台PI迟滞逆模型参数辨识值
参数 数值 参数 数值 参数 数值 参数 数值 $ {r_1} $ 0.02 $ {b_1} $ −0.019 0 $ {r_9} $ 1.11 $ {b_9} $ −0.139 3 $ {r_2} $ 0.04 $ {b_2} $ −0.039 9 $ {r_{10}} $ 1.83 $ {b_{10}} $ −0.075 7 $ {r_3} $ 0.05 $ {b_3} $ −0.022 1 $ {r_{11}} $ 2.59 $ {b_{11}} $ −0.035 0 $ {r_4} $ 0.07 $ {b_4} $ −1.219 0 $ {r_{12}} $ 3.66 $ {b_{12}} $ −0.005 8 $ {r_5} $ 0.18 $ {b_5} $ −0.493 3 $ {r_{13}} $ 8.07 $ {b_{13}} $ −0.044 7 $ {r_6} $ 0.32 $ {b_6} $ −0.021 8 $ {r_{14}} $ 12.57 $ {b_{14}} $ −0.014 3 $ {r_7} $ 0.46 $ {b_7} $ −0.222 4 $ {r_{15}} $ 17.10 $ {b_{15}} $ −0.037 8 $ {r_8} $ 0.79 $ {b_8} $ −0.002 8 $ {r_{16}} $ 21.82 $ {b_{16}} $ −0.023 6
下载: 导出CSV
表 5 逆模型前馈控制及自抗扰控制各输入信号的控制误差
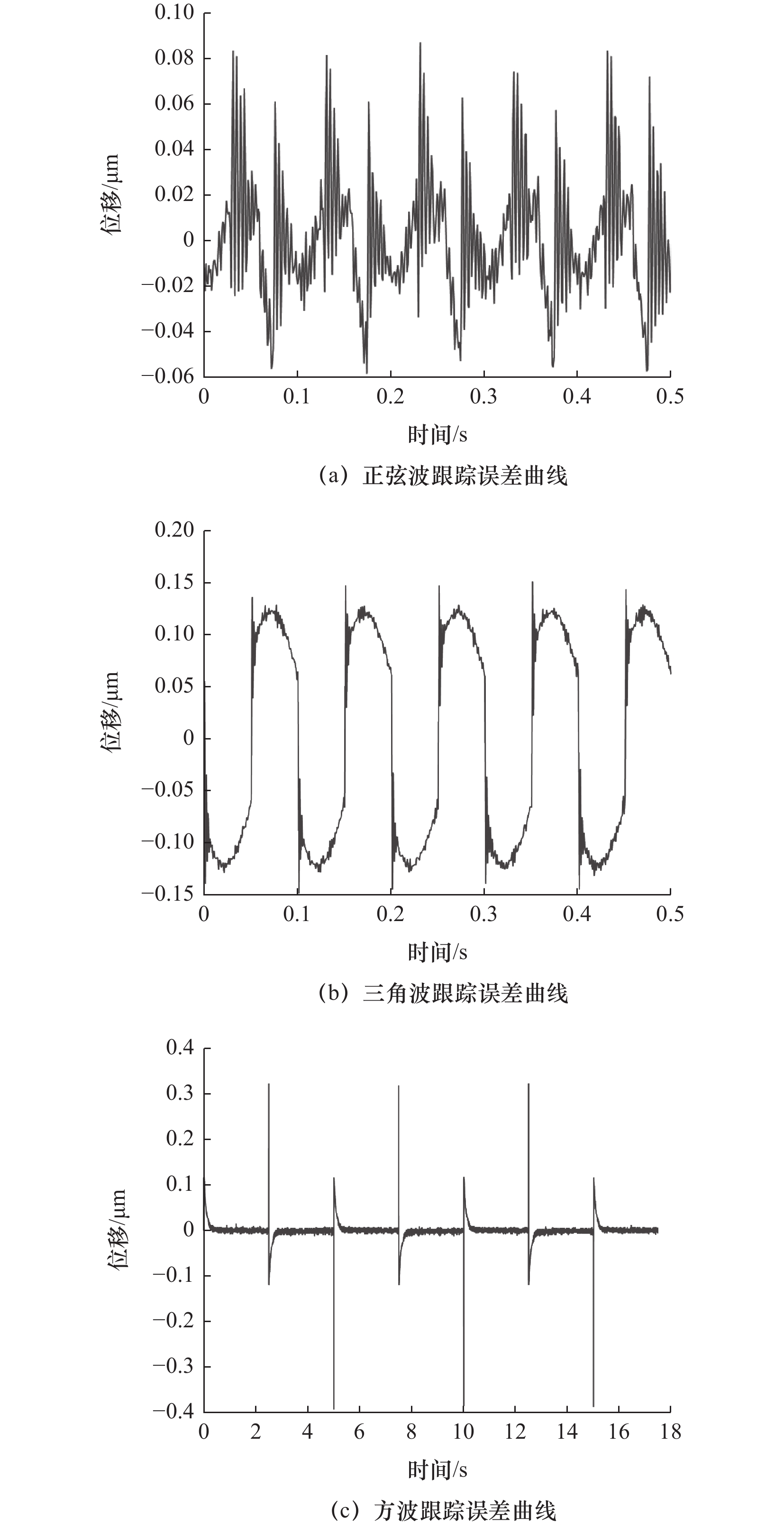
前馈补偿 正弦自抗扰 三角自抗扰 方波自抗扰 RMSE RE RMSE RE RMSE RE RMSE RE 1.155 7 2.111 4% 0.018 7 0.187% 0.048 7 0.974% 0.018 2 0.364%
下载: 导出CSV
-
[1] 李宇阳,朱玉川,李仁强,等. 双压电叠堆驱动执行器率相关迟滞建模与分析[J]. 压电与声光,2019,41(2):258-264. [2] 李东明,罗姜,李丽,等. 压电陶瓷驱动微进给刀架的迟滞建模[J]. 压电与声光,2018,40(5):776-779. [3] 朱斌,朱玉川,李宇阳,等. 压电叠堆执行器迟滞建模与前馈补偿研究[J]. 压电与声光,2018,40(1):38-41,46. [4] Jiang X,Zhu Y C. Mechanical amplifier for giant magnetostrictive materials and piezoelectric materials[J]. Hydromechatronics Engineering,2013,41(24):30-34. [5] 刘德祥,谭晓兰,周文博,等. 压电式MEMS驱动器的稳健设计研究[J]. [J]. 传感器与微系统,2023,42(2):53-55,63. [6] Yu Z L,Liu Y,Wang Y,et al. Hysteresis compensation and control of piezoelectric actuator based on an improved PI model[J]. Chinese Journal of Scientific Instrument,2017,38(1):129-135. [7] 侯丽娟,秦会斌,胡炜薇,等. 基于微纳结构的柔性压力传感器设计与制备[J]. 传感器与微系统,2022,41(7):73-76. [8] 杨晓京,胡俊文,李庭树. 压电微定位台的率相关动态迟滞建模及参数辨识[J]. 光学精密工程,2019,27(3):610-618. [9] 杨洋,温慧婷,欧冬梅. 基于压电陶瓷微动平台逆模型的复合控制方法[J]. 科学技术创新,2020(25):160-161. [10] 严刚峰. 应用迭代学习控制的压电电机定位台高精度跟踪[J]. 中国电机工程学报,2018,38(20):6127-6133. -

 下载:
下载:


 点击查看大图
点击查看大图
图(9) / 表(5)
计量
- 文章访问数: 36
- HTML全文浏览量: 8
- PDF下载量: 6
- 被引次数: 0


