

Trajectory planning of 6-DOF industrial robot based on improved particle swarm optimization algorithm
-
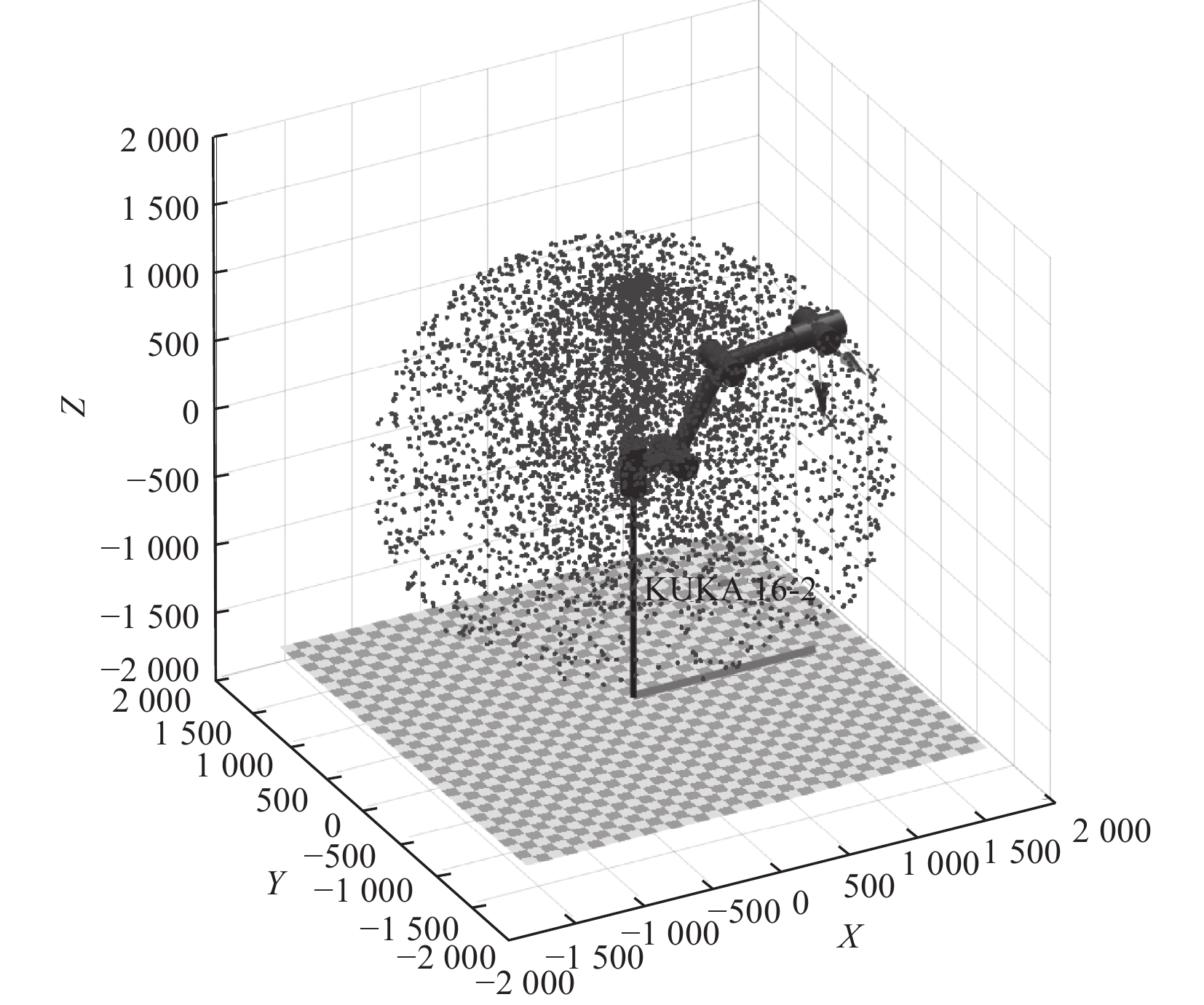
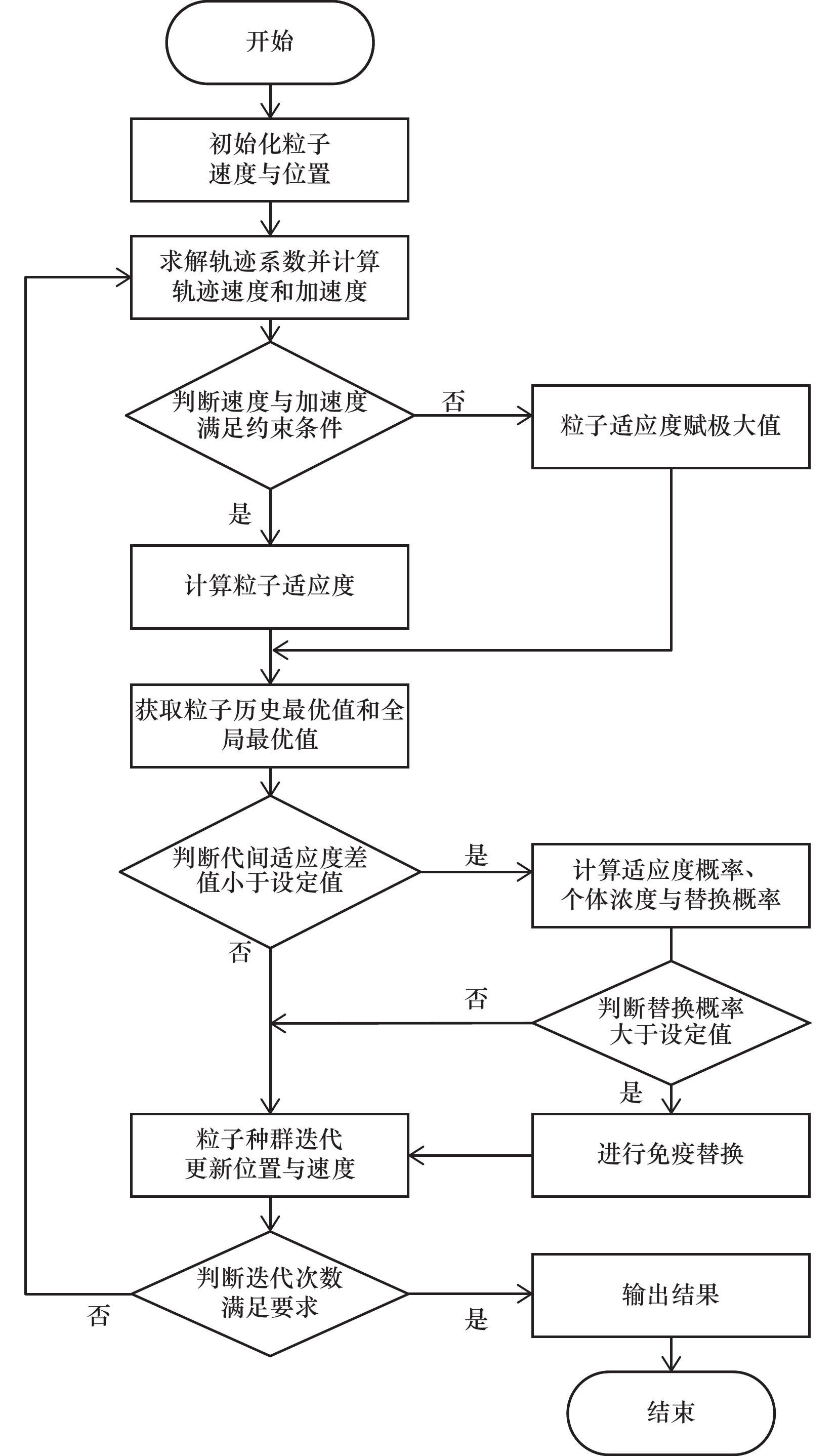
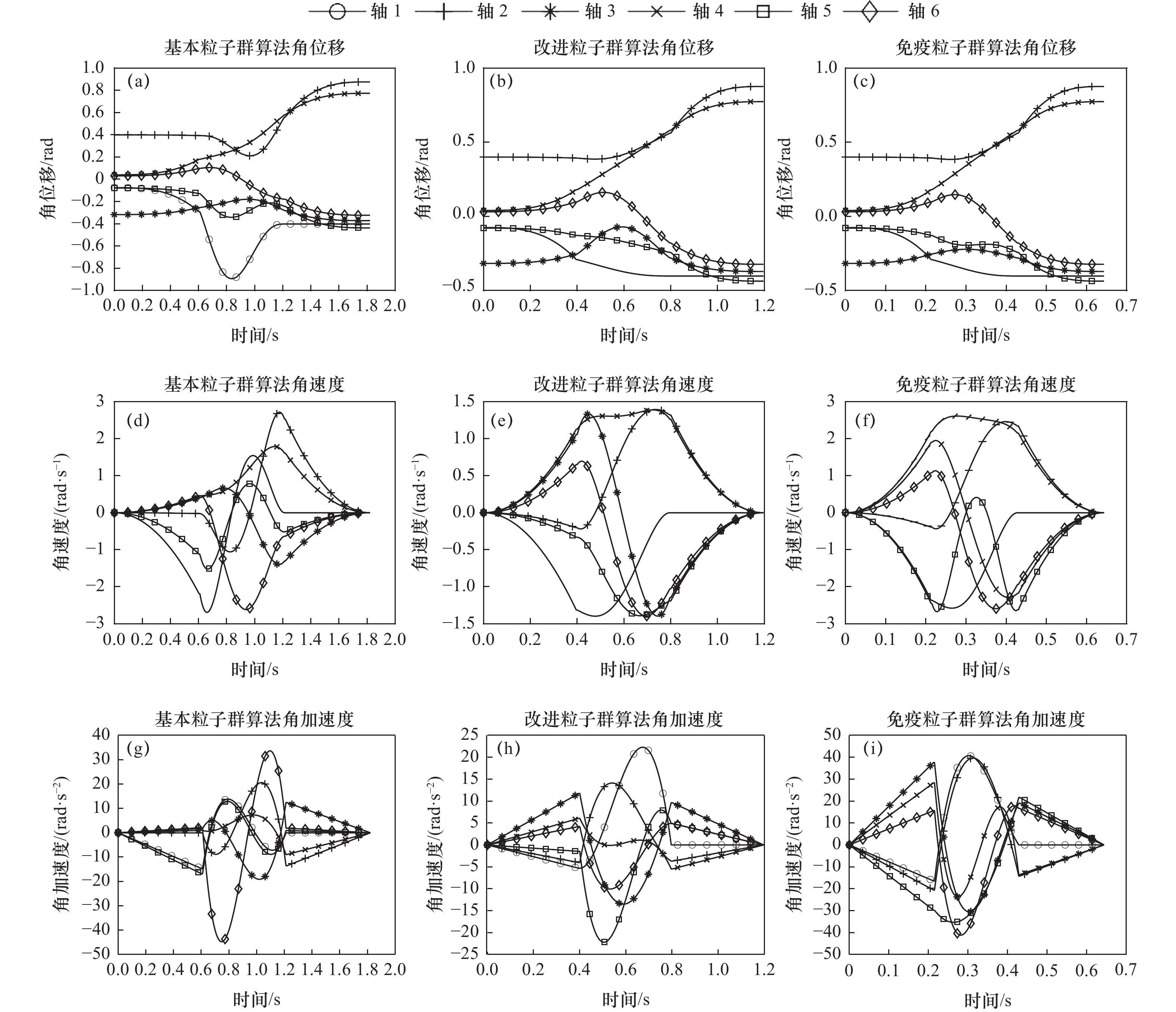
摘要: 针对工件打磨工况,设计建立用于打磨的机器人运动学模型,规划机器人运动学轨迹,通过改进粒子群算法优化轨迹曲线,减少机器人运行时间,提高机器人工作效率。首先建立打磨工业机器人空间运动学模型,计算目标点从笛卡尔空间转换到关节空间的逆解,在关节空间中利用“三次-五次-三次”三段多项式曲线对所求逆解进行轨迹规划,以轨迹运动时间最短作为优化目标。利用融合免疫操作的改进粒子群算法对轨迹曲线进行优化,将改进算法的优化结果与传统粒子群算法进行对比;改进后的新算法改善了粒子群算法易陷入局部最优的问题,适应度结果更好,算法效果更佳。Abstract: For dealing with grinding, the robot kinematics model is designed and established, the robot trajectory is planned, and the trajectory curve is optimized by an improving particle swarm optimization algorithm to reduce the running time and improve the working efficiency of the robot. Firstly, this paper establishes the spatial kinematics model of the industrial robot for polishing, calculates the joint space inverse solution position corresponding to the target pose points in Cartesian space, uses the 3-5-3 three segment polynomial curve to plan the trajectory of the inverse solution points in joint space, and takes the shortest trajectory motion time as the optimization goal. By using the improved particle swarm optimization algorithm with immune operation to optimize the trajectory curve, the optimization results of the improved algorithm are compared with the traditional particle swarm optimization algorithm, and it is found that the improved new algorithm can better avoid falling into local optimization, the fitness result is better, and the algorithm effect is better.
-
Key words:
- robot /
- trajectory planning /
- particle swarm optimization /
- optimal time /
- immune algorithm
-
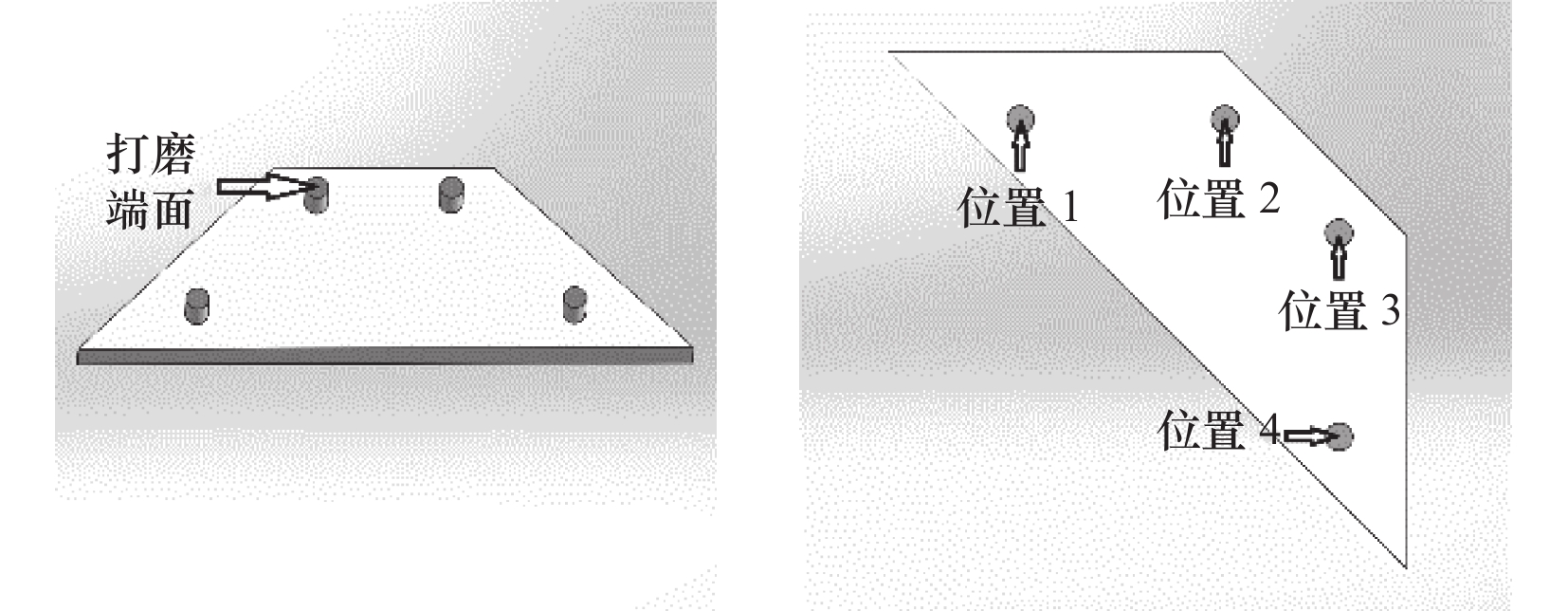
表 1 目标点末端位姿
空间位姿 空间位置 空间姿态 $ {T}_{1} $ (1 000, 75, 425) x轴正方向 $ {T}_{2} $ (1 000, 300, 425) x轴正方向 $ {T}_{3} $ (1 000, 425, 300) x轴正方向 $ {T}_{4} $ (1 000, 425, 75) x轴正方向  下载: 导出CSV
下载: 导出CSV
表 2 机器人改进D-H参数
关节$ i $ $ {\mathrm{\alpha }}_{i-1}/\left(^\circ\right) $ $ {a}_{i-1}/\mathrm{m}\mathrm{m} $ $ {d}_{i}/\mathrm{m}\mathrm{m} $ $ {\mathrm{\theta }}_{i} $$/\left(^\circ\right)$ 1 180 0 0 (−185~185) 2 90 260 0 (−155~35) 3 0 680 0 (−60~244) 4 −90 0 −670 (−350~350) 5 90 0 0 (−130~130) 6 −90 0 0 (−350~350)
下载: 导出CSV
表 3 关节空间逆解结果
rad $ {P}_{1} $ $ {P}_{2} $ $ {P}_{3} $ $ {P}_{4} $ 关节1 −0.074 9 −0.291 5 −0.401 9 −0.401 9 $ \mathrm{关}\mathrm{节}2 $ 0.400 0 0.393 2 0.561 3 0.876 2 关节3 −0.317 0 −0.253 6 −0.280 5 −0.371 5 关节4 0.040 2 0.180 1 0.580 5 0.773 9 关节5 −0.078 9 −0.128 6 −0.243 0 −0.436 9 关节6 0.031 2 0.098 6 −0.179 4 −0.323 0
下载: 导出CSV
表 4 测试函数适应度均值
Griewank function Ackley function 迭代次数 10代 20代 50代 100代 10代 20代 50代 100代 标准粒子群 0.131 1 0.096 6 0.074 2 0.043 6 3.088 9 2.688 1 2.617 9 2.594 8 改进粒子群 0.089 9 0.068 9 0.047 2 0.026 4 1.953 7 1.708 1 1.694 3 1.694 0 免疫粒子群 0.062 2 0.030 9 0.023 0 0.019 3 0.901 4 0.263 5 0.087 4 0.061 1 Schaffer2 function Levy function 迭代次数 10代 20代 50代 100代 10代 20代 50代 100代 标准粒子群 0.003 4 0.002 7 0.002 5 0.002 4 0.019 3 0.013 1 0.012 6 0.012 6 改进粒子群 0.003 2 0.002 4 0.002 3 0.002 2 0.031 8 0.017 9 0.012 9 0.011 7 免疫粒子群 4.461×10−4 7.401×10−5 2.338×10−7 5.999×10−8 0.004 7 0.001 4 0.000 5 0.000 3
下载: 导出CSV
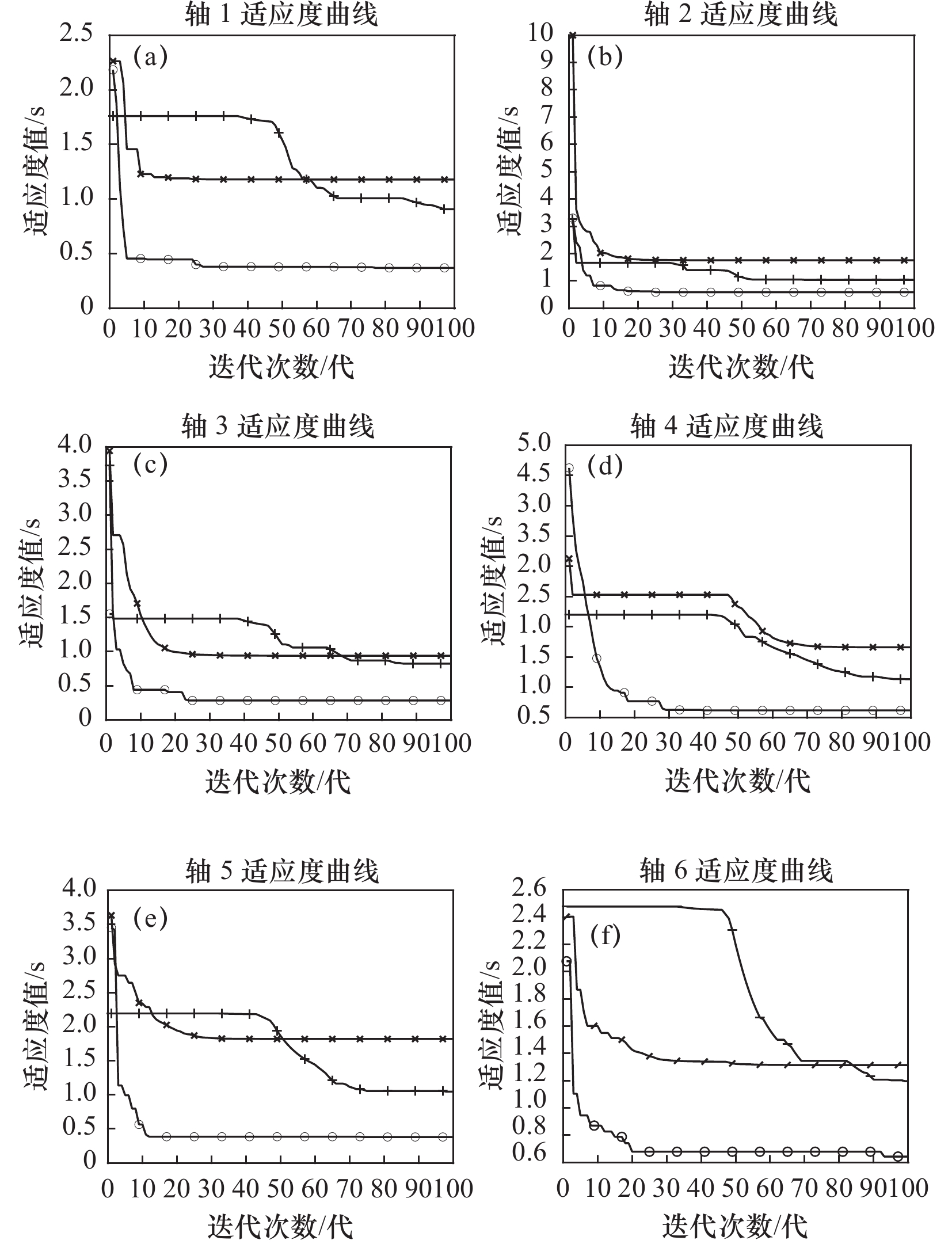
表 5 适应度值
$ {\mathit{f}}_{1} $ $ {\mathit{f}}_{2} $ $ {\mathit{f}}_{3} $ $ {\mathit{f}}_{4} $ $ {\mathit{f}}_{5} $ $ {\mathit{f}}_{6} $ ${\mathit{f} }_{\rm{a}\rm{v}\rm{e} }$ ${\mathit{f} }_{\rm{m}\rm{a}\rm{x} }$ 方法1 1.178 6 1.759 6 0.942 6 1.664 2 1.820 9 1.314 8 1.446 8 1.820 9 方法2 0.907 7 1.041 0 0.825 5 1.135 5 1.048 5 1.196 4 1.025 8 1.196 4 方法3 0.370 3 0.589 4 0.286 5 0.621 9 0.382 5 0.643 3 0.482 3 0.643 3
下载: 导出CSV
表 6 适应度优化率
$ {\mathit{s}}_{1} $ $ {\mathit{s}}_{2} $ $ {\mathit{s}}_{3} $ $ {\mathit{s}}_{4} $ $ {\mathit{s}}_{5} $ $ {\mathit{s}}_{6} $ ${\mathit{s} }_{\rm{a}\rm{v}\rm{e} }$ ${\mathit{s} }_{\rm{m}\rm{a}\rm{x} }$ 对比1 1.298 1.690 1.142 1.466 1.737 1.099 1.410 1.522 对比2 3.183 2.985 3.290 2.676 4.761 2.044 3.000 2.831 对比3 2.451 1.766 2.881 1.826 2.741 1.860 2.127 1.860
下载: 导出CSV
-
[1] 李芳芳, 孙乾. 我国工业机器人发展现状的调查分析[J]. 机械传动, 2019, 43(6): 172-176. doi: 10.16578/j.issn.1004.2539.2019.06.031 [2] 龙樟, 李显涛, 帅涛, 等. 工业机器人轨迹规划研究现状综述[J]. 机械科学与技术, 2021, 40(6): 853-862. doi: 10.13433/j.cnki.1003-8728.20200132 [3] 付荣, 居鹤华. 基于粒子群优化的时间最优机械臂轨迹规划算法[J]. 信息与控制, 2011, 40(6): 802-808. [4] 徐尤南, 刘志强, 陈洁. 基于粒子群算法的码垛机器人时间轨迹优化研究[J]. 华东交通大学学报, 2021, 38(3): 75-81. doi: 10.16749/j.cnki.jecjtu.20210706.008 [5] 冯斌, 刘峰, 郑飂默. 基于粒子群算法的机器人关节空间最优运动轨迹规划[J]. 组合机床与自动化加工技术, 2018(5): 1-4. doi: 10.13462/j.cnki.mmtamt.2018.05.001 [6] 李丽, 房立金, 王国勋. 基于多目标粒子群优化算法的6R工业机器人轨迹优化[J]. 机械传动, 2018, 42(8): 17-22,90. doi: 10.16578/j.issn.1004.2539.2018.08.004 [7] Choi Y K, Park J H, Kim H S, et al. Optimal trajectory planning and sliding mode control for robots using evolution strategy[J]. Robotica, 2000, 18(8): 423-428. [8] 王卫忠, 赵杰, 高永生, 等. 机器人的平面曲线轨迹规划方法[J]. 哈尔滨工业大学学报, 2008(3): 389-392. doi: 10.3321/j.issn:0367-6234.2008.03.013 [9] Huang Junsen, Hu Pengfei, Wu Kaiyuan, et al. Optimal time-jerk trajectory planning for industrial robots[J]. Mechanism and Machine Theory, 2018, 121: 530-544. doi: 10.1016/j.mechmachtheory.2017.11.006 [10] 李国洪, 王远亮. 基于B样条和改进遗传算法的机器人时间最优轨迹规划[J]. 计算机应用与软件, 2020, 37(11): 215-223,279. doi: 10.3969/j.issn.1000-386x.2020.11.036 [11] Yi F, Jin Q, Jie H, et al. An approach for jerk-continuous trajectory generation of robotic manipulators with kinematical constraints[J]. Mechanism and Machine Theory, 2020, 153: 103957. doi: 10.1016/j.mechmachtheory.2020.103957 [12] Klemens S, Hubert G, Peter S. On time-optimal trajectory planning for a flexible link robot[J]. Proceedings of the Institution of Mechanical Engineers, Part I:Journal of Systems and Control Engineering, 2013, 227(10): 752-763. doi: 10.1177/0959651813500486 [13] 梁萌. 基于五次多项式算法的机器人轨迹规划研究[J]. 粘接, 2020, 44(11): 70-73. doi: 10.3969/j.issn.1001-5922.2020.11.018 [14] 何建成, 李林升, 林国湘. 基于多目标粒子群算法工业机器人最优轨迹规划[J]. 制造业自动化, 2021, 43(2): 57-62. [15] Xu X R, Wang X G, Qin F. Trajectory planning of robot manipulators by using spline function approach[C]. The 3rd World Congress on Intelligent Control and Automation. Piscataway, NJ, USA: IEEE, 2000. [16] 苑丹丹, 邓三鹏, 王仲民. 基于蒙特卡洛法的模块化机器人工作空间分析[J]. 机床与液压, 2017, 45(11): 9-12. [17] Peter Corke. Robotics toolbox for MATLAB[M]. Release 10. Peter Corke, 2020. [18] 李爱国, 覃征, 鲍复民, 等. 粒子群优化算法[J]. 计算机工程与应用, 2002, 38(21): 1-3,17. doi: 10.3321/j.issn:1002-8331.2002.21.001 [19] 杨维, 李歧强. 粒子群优化算法综述[J]. 中国工程科学, 2004, 6(5): 87-94. [20] Shi Y N, Qi P L, Liu Y, et al. Channel modeling and optimization of leaky coaxial cable network in coal mine based on state transition method and particle swarm optimization algorithm[J]. IEEE Access, 2021, 9: 86889-86898. doi: 10.1109/ACCESS.2021.3088842 [21] 杨博雯, 钱伟懿. 粒子群优化算法中惯性权重改进策略综述[J]. 渤海大学学报, 2019, 40(3): 274-288. [22] 韩顺杰, 单新超, 于爱君, 等. 基于改进粒子群算法的工业机器人轨迹规划[J]. 制造技术与机床, 2021(4): 8-14. doi: 10.19287/j.cnki.1005-2402.2021.04.001 [23] 唐忠. 粒子群算法惯性权重的研究[J]. 广西大学学报, 2009, 34(5): 640-644. [24] 王磊, 潘进, 焦李成. 免疫算法[J]. 电子学报, 2000, 28(7): 74-78. doi: 10.3321/j.issn:0372-2112.2000.07.020 [25] 高鹰, 谢胜利. 免疫粒子群优化算法[J]. 计算机工程与应用, 2004, 40(6): 4-6, 33. -

 下载:
下载:

 点击查看大图
点击查看大图
图(5) / 表(6)
计量
- 文章访问数: 142
- HTML全文浏览量: 13
- PDF下载量: 32
- 被引次数: 0


