

Research on the influence of industrial robot servo drive system on the performance of the whole machine
-
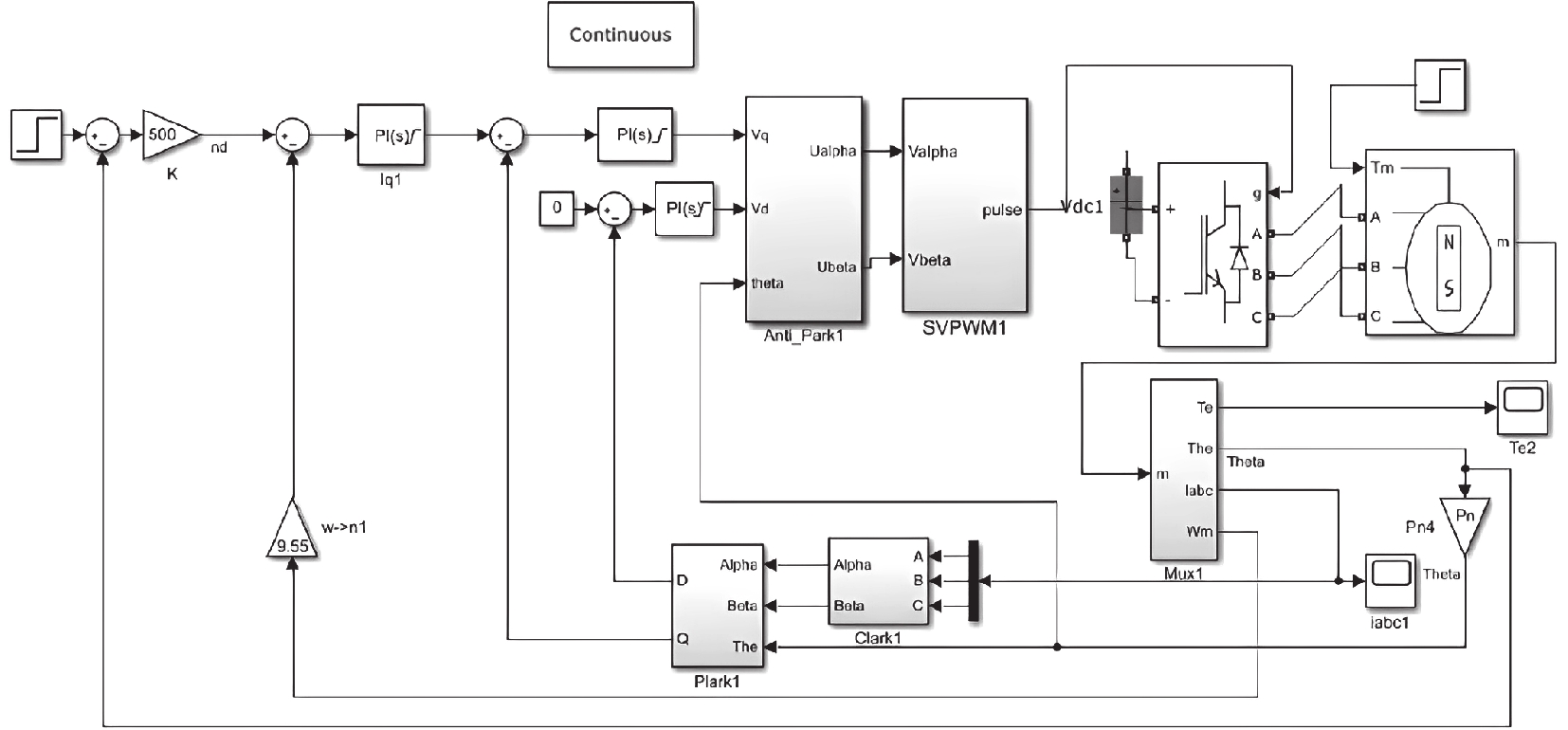
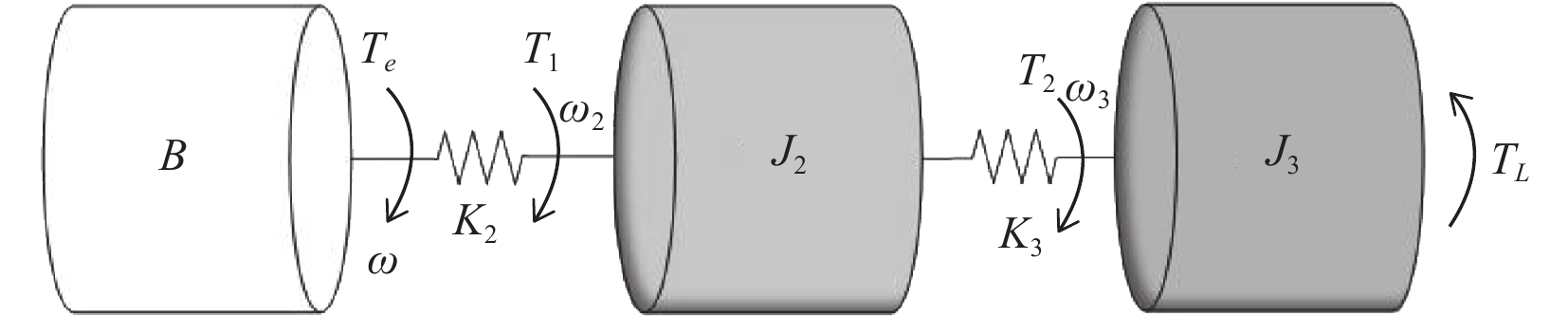
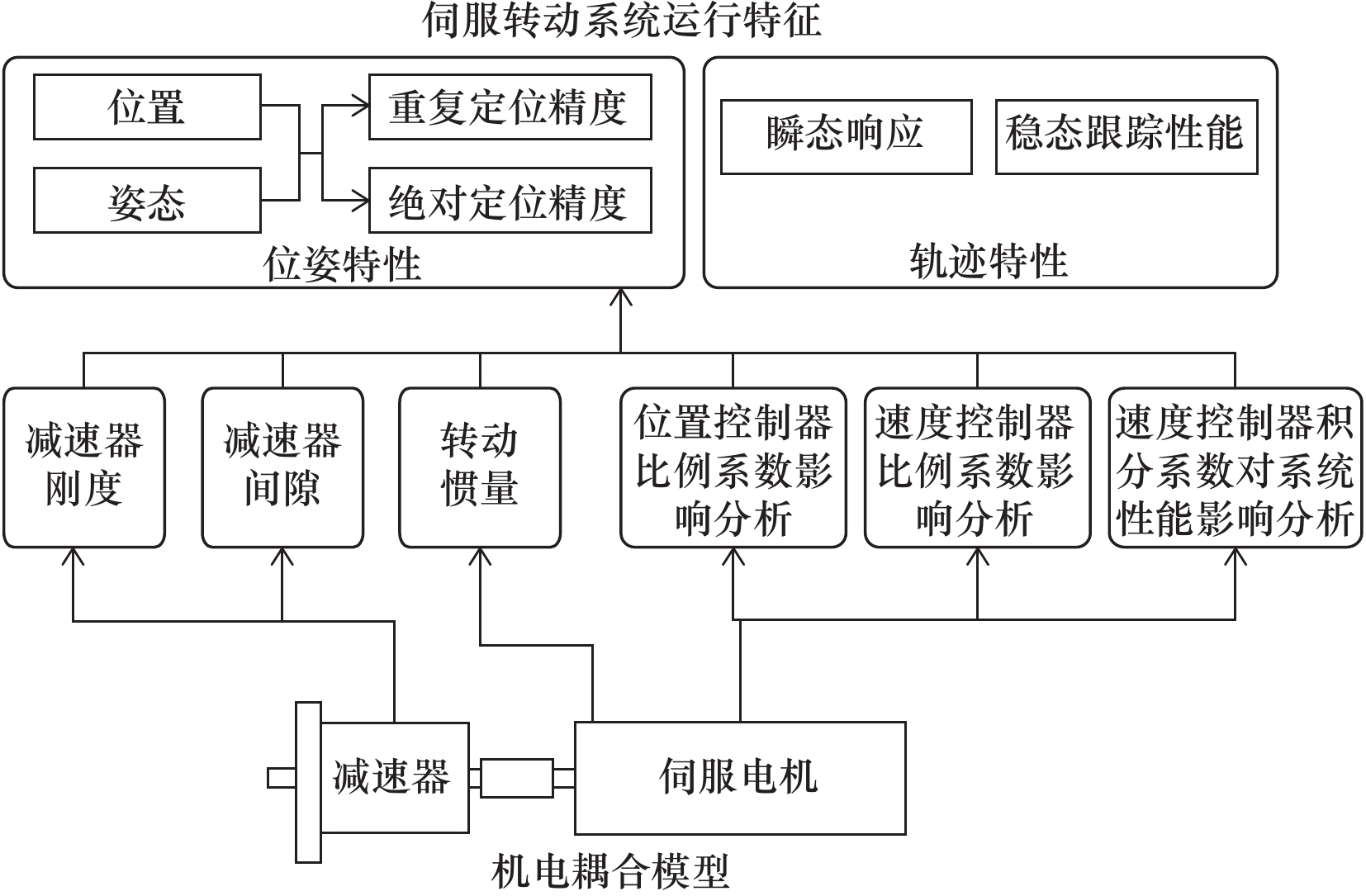
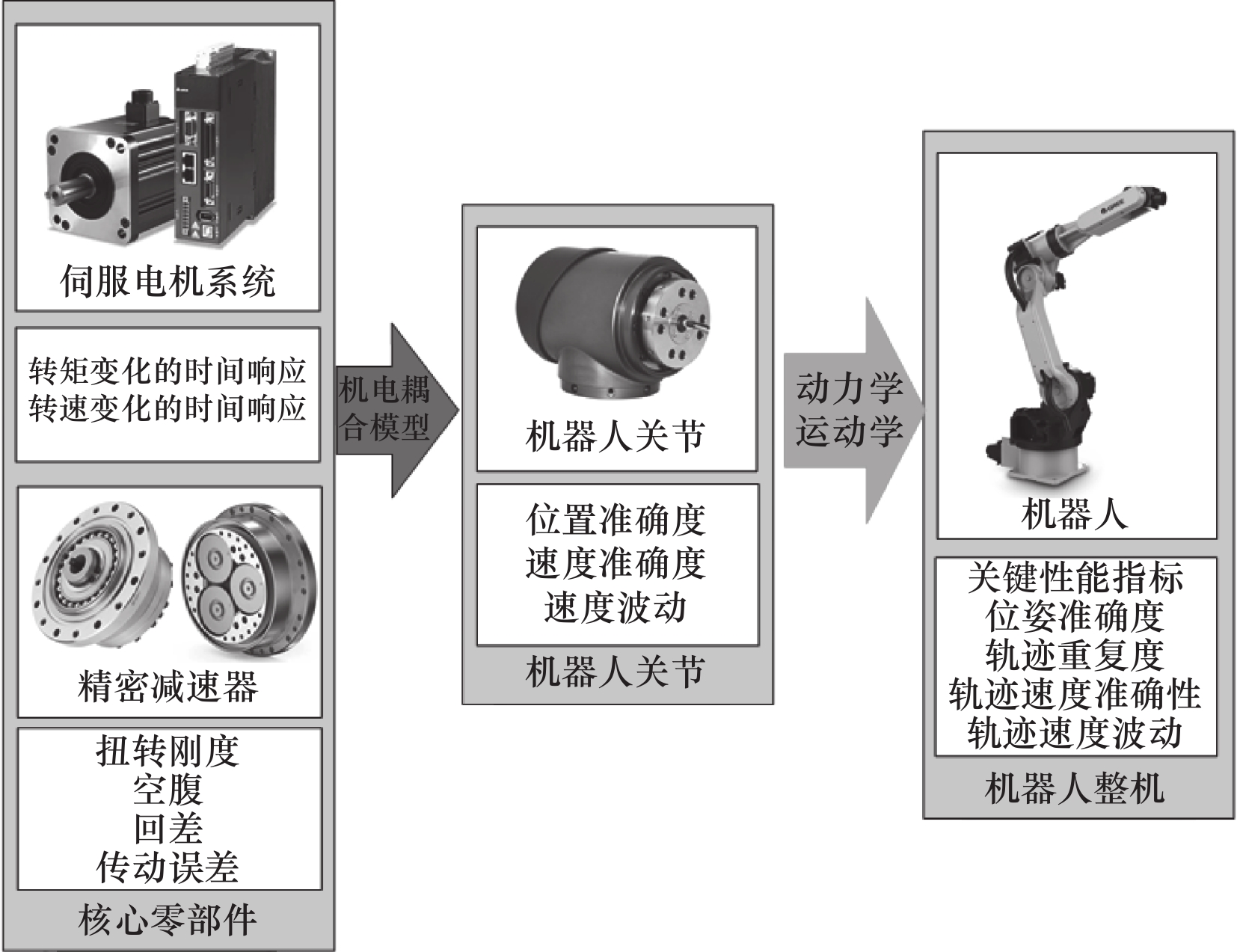
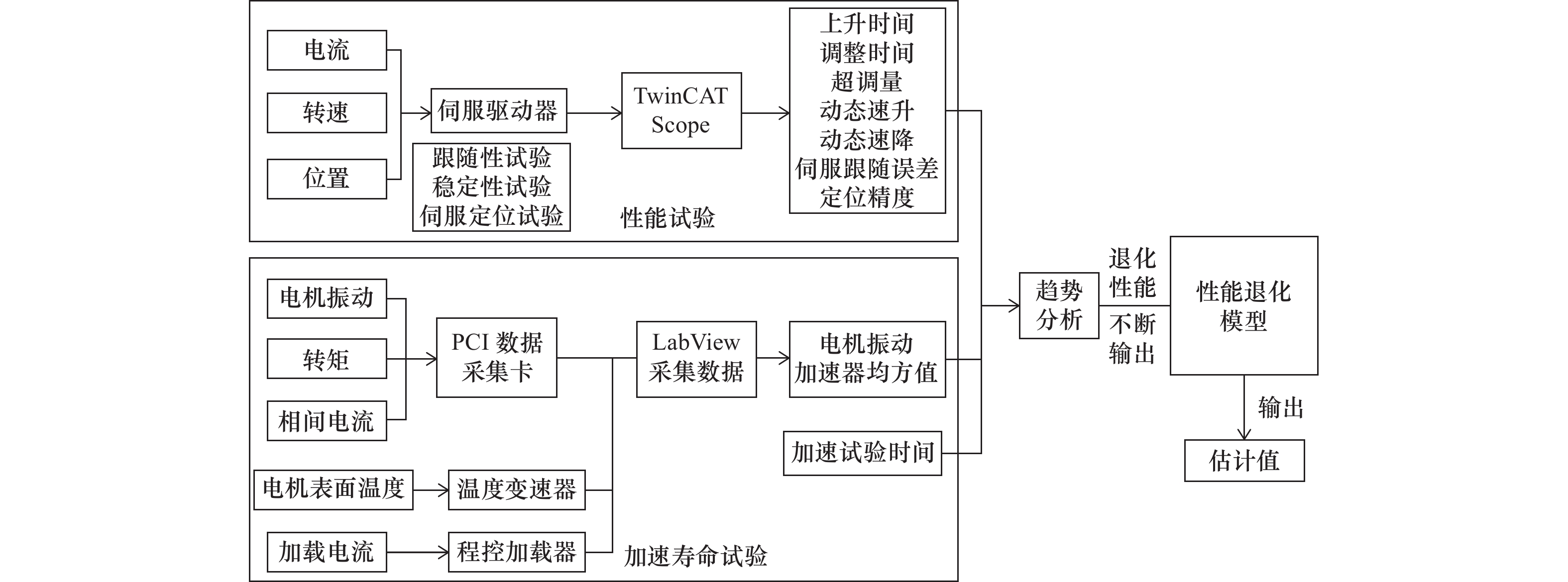
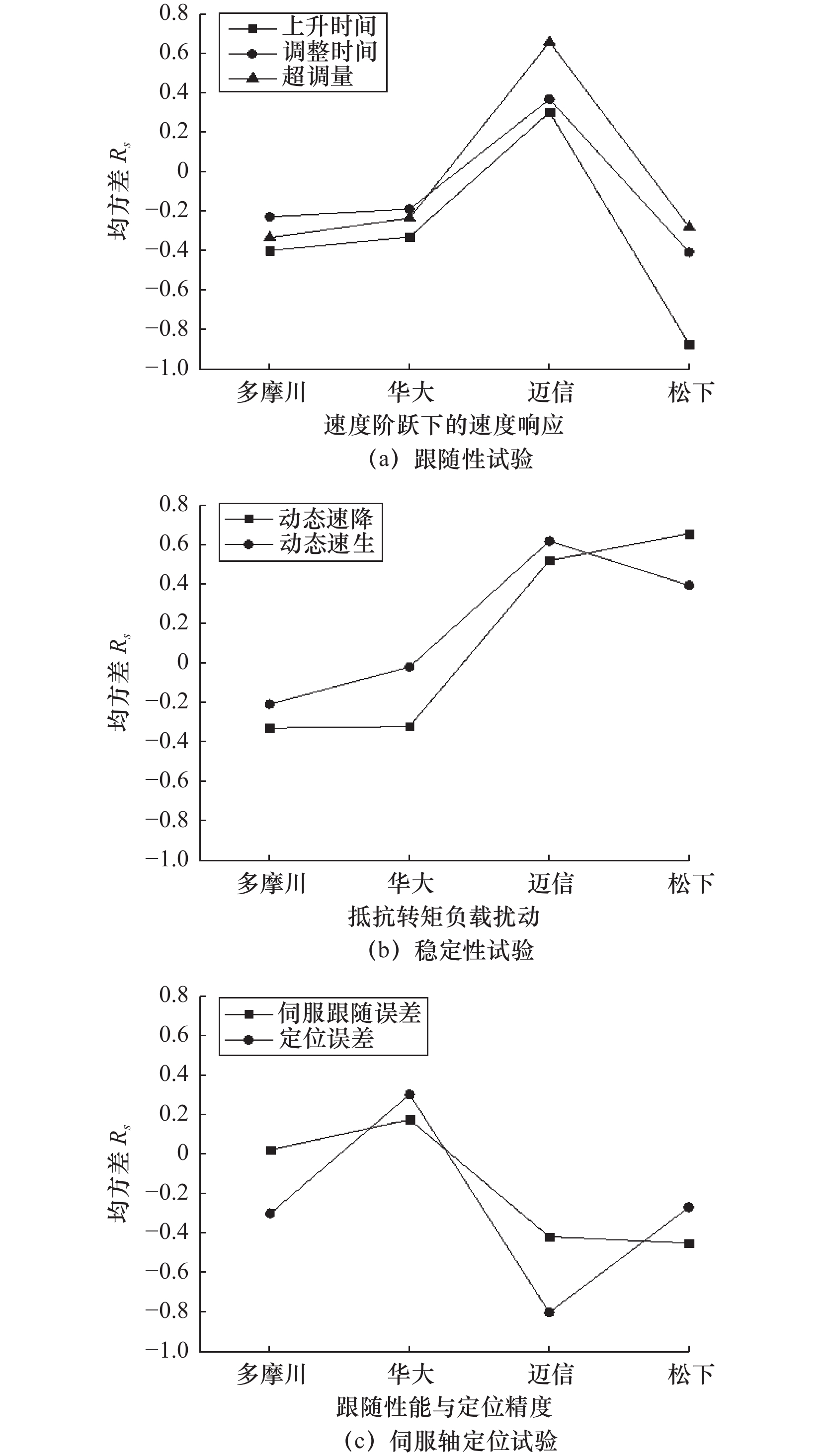
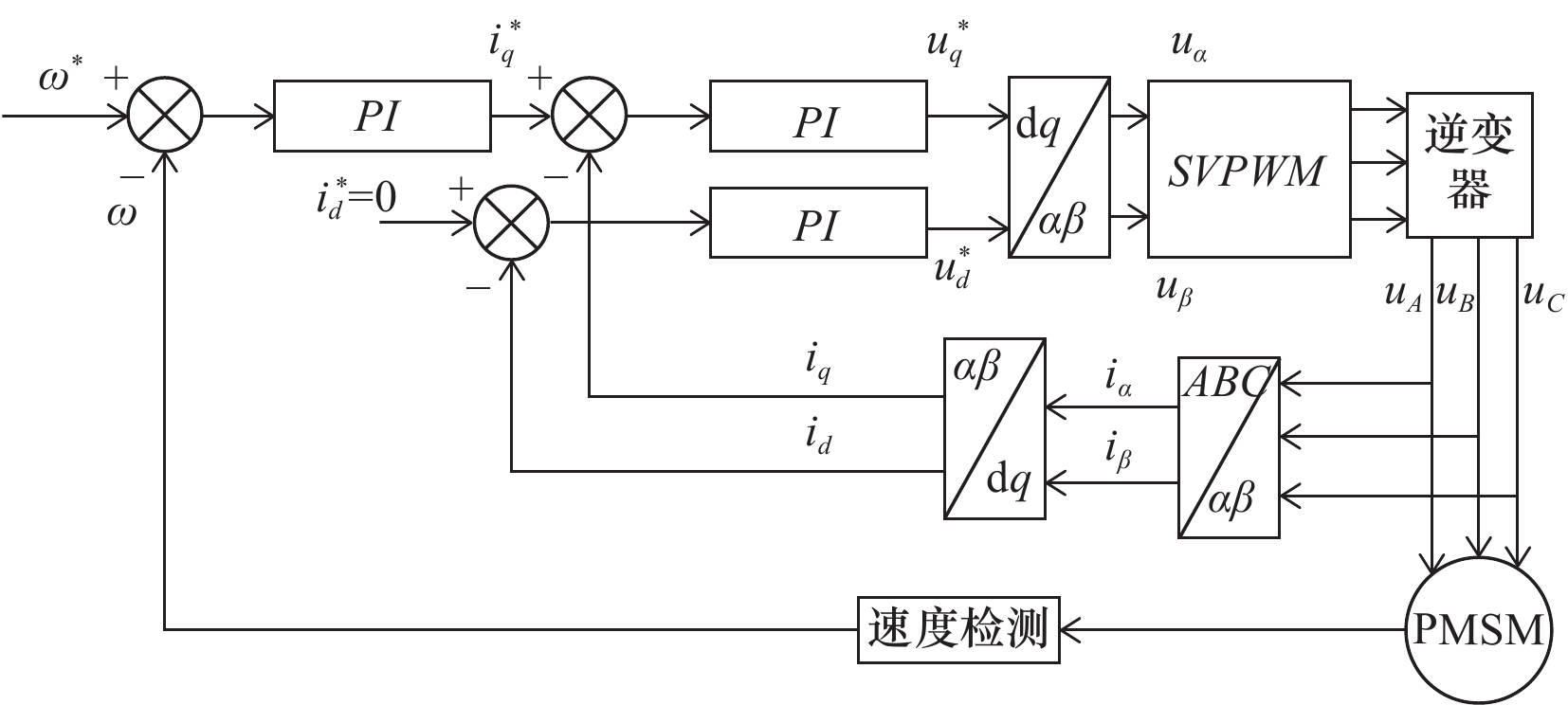
摘要: 为研究精密减速器、伺服电机作为核心零部件应用在工业机器人上对整机性能的影响,提出基于伺服-精密传动系统的机电耦合分析、测试及评价方法。以永磁同步电机为研究对象建立伺服系统矢量控制数学模型及双闭环电机矢量控制算法模型。对伺服传动系统运行品质模型仿真,建立运行品质参数与整机关键性能指标之间的映射关系。根据传动系统及核心零部件静动态特性参数,分别建立减速器和伺服系统性能退化模型,并通过加速寿命试验对参数准确度进行评估。结果表明,减速器主要通过启动转矩、扭转刚度等5项参数,伺服系统主要通过伺服轴定位误差、跟随误差等7项参数反映对整机性能的影响。Abstract: In order to study the influence of precision reducer and servo motor as core components on the performance of the industrial robot, an electromechanical coupling analysis, testing and evaluation method based on servo-precision transmission system is proposed. Taking the permanent magnet synchronous motor as the research object, the vector control mathematical model of the servo system and the double closed-loop motor vector control algorithm model are established. The operating quality model of the servo drive system is simulated, and the mapping relationship between the operating quality parameters and the key performance indicators of the whole machine is established. According to the static and dynamic characteristic parameters of the transmission system and core components, the performance degradation models of the reducer and the servo system were established respectively, and the parameter accuracy was evaluated through the accelerated life test. The results show that the influence on the performance of the whole machine is mainly reflected by 5 parameters such as the starting torque and torsional stiffness of the reducer, and 7 parameters such as the positioning error of the servo axis of the servo system and the following error.
-
表 1 试验测试的RV减速器参数
品牌/产地 型号 额定输出
转矩/(N·m)额定输出
转速/(r/min)测试
时间/h振康/中国 ZKRV-40E-121 400 1 815 700 帝人/日本 RV-40E-121 412 1 815 1 000  下载: 导出CSV
下载: 导出CSV
表 2 RV减速器加速退化试验单次循环参数表
序号 加载内容 转速/(r/min) 扭矩/(N·m) 时间/s t1 加速到额定转速$ {n_N} $ 0~1 815 - 5 - 加载到额定转矩$ {T_N} $ 1 815 - 4 t2 额定转矩$ {T_N} $ 1 815 400/412 15 - $ {T_N} $过渡到2$ {T_N} $ 1 815 - 7 t3 2倍额定转矩$ {T_N} $ 1 815 600/606 8 - 2$ {T_N} $过渡到$ {T_N} $ 1 815 - 7 t4 额定转矩$ {T_N} $ 1 815 400/412 15 - 额定转矩$ {T_N} $降至0 1 815 - 4 t5 额定转速$ {n_N} $降至0 1 815~0 0 5 t6 反向加载间隔 0 0 2
下载: 导出CSV
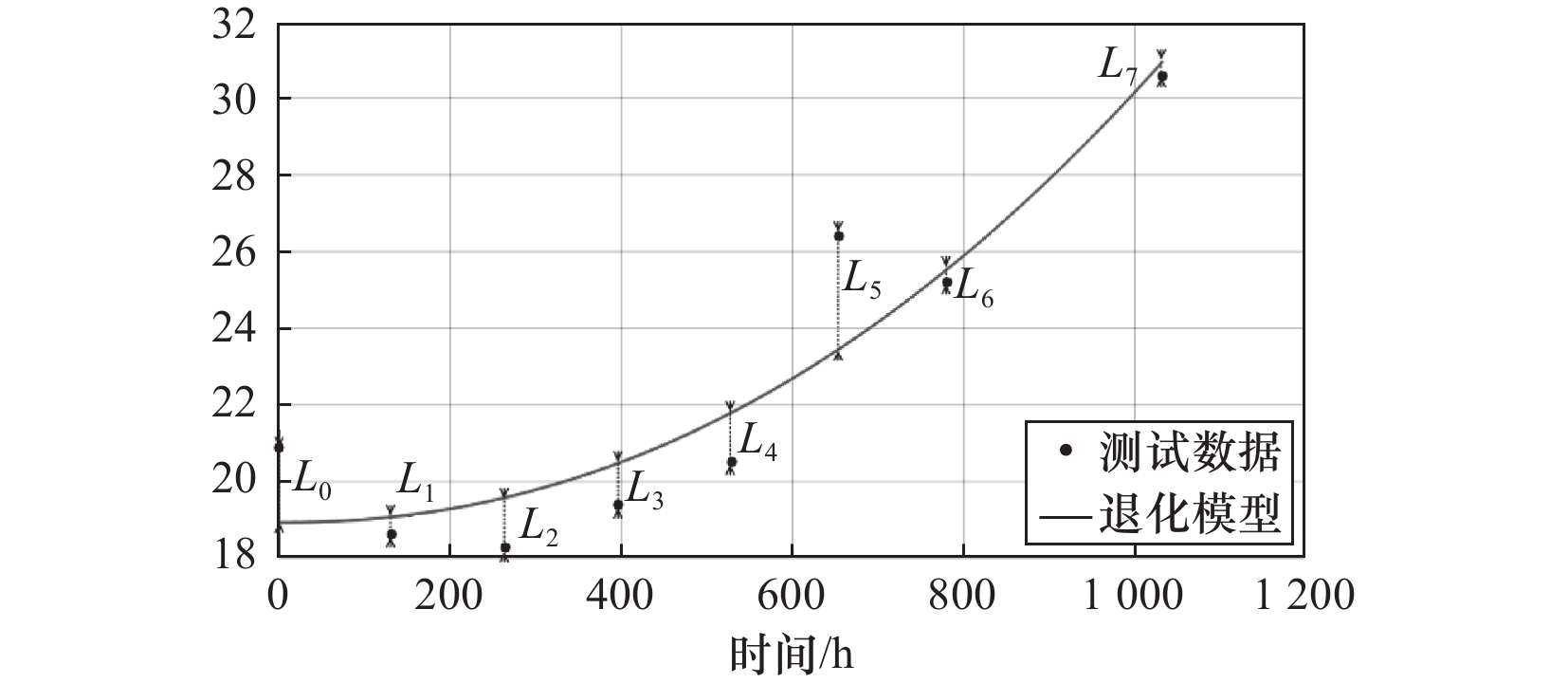
表 3 RV减速器退化模型准确度
型号及准确度 传动误差 回差 空程 效率 帝人RV40E 1# 87.05% 82.83% 83.63% 99.22% 2# 84.67% 87.73% 85.16% 99.52% 单向性能平均 85.86% 85.05% 84.40% 99.37% 整体性能 88.67% 振康RV40E 3# 80.02% 87.00% 89.91% 98.20% 4# 81.52% 94.58% 92.98% 98.03% 单向性能平均 80.77% 90.79% 91.10% 98.17% 整体性能 90.21%
下载: 导出CSV
表 5 试验样品参数及加速试验时间
品牌 额定扭矩/(N·m) 额定功率/kW 试验时间/h 多摩川 1.27 0.4 1 140 华大 7.5 2.4 490 迈信 1.27 0.4 2 090 松下 7.16 1.5 2 250
下载: 导出CSV
表 6 伺服电机系统加速试验循环参数表
序号 负载转矩 转速/(r/min) 时间/s t1 - 电机停止 0.5 t2 额定转矩$ {T_N} $ 加速到额定转速$ {n_N} $ 1 t3 $ {T_N} $ $ {n_N} $ 4.5 t4 额定转矩$ {T}_{N} $过渡到1.5$ {T_N} $ $ {n_N} $ 2.5 t5 1.5$ {T_N} $ $ {n_N} $ 3 t6 1.5$ {T_N} $过渡到额定转矩$ {T_N} $ $ {n_N} $ 2.5 t7 $ {T_N} $ $ {n_N} $ 4.5 t8 $ {T_N} $ 额定转速$ {n_N} $减速至0 1 t9 - 电机停止 0.5
下载: 导出CSV
-
[1] 曾学淑, 刘红, 崔欢欢. 工业机器人在制造业中的应用研究[J]. 中国设备工程, 2022(3): 34-35. doi: 10.3969/j.issn.1671-0711.2022.03.021 [2] Wang E Z, Lee C C, Li Y Y. Assessing the impact of industrial robots on manufacturing energy intensity in 38 countries[J]. Energy Economics, 2022, 105: 105748. doi: 10.1016/j.eneco.2021.105748 [3] Villani V, Pini F, Leali F, et al. Survey on human–robot collaboration in industrial settings: Safety, intuitive interfaces and applications[J]. Mechatronics, 2018, 55: 248-266. doi: 10.1016/j.mechatronics.2018.02.009 [4] 季文超. 我国工业机器人技术现状与产业化发展战略[J]. 电子元器件与信息技术, 2020, 4(8): 64-65. doi: 10.19772/j.cnki.2096-4455.2020.8.029 [5] 工业机器人核心零部件缺失, 紧固件寻求契机[J]. 机床与液压, 2017, 45(11): 183. [6] 赵灵. 交流伺服精密驱动系统齿隙非线性振动特性研究[D]. 重庆: 重庆大学, 2014. [7] 周超群. 伺服系统中精密传动系统机电耦合分析[D]. 重庆: 重庆大学, 2007. [8] Kuo C F J, Hsu C H, Tsai C C. Control of a permanent magnet synchronous motor with a fuzzy sliding-mode controller[J]. The International Journal of Advanced Manufacturing Technology, 2007, 32(7-8): 757-763. doi: 10.1007/s00170-005-0393-2 [9] 曹宏. 空间环境下滤波减速器的加速寿命试验研究[D]. 成都: 电子科技大学, 2014. [10] 樊国权. 高性能永磁同步电机伺服系统控制策略研究[D]. 哈尔滨: 哈尔滨工业大学, 2013. [11] 乔景慧, 王立强. 永磁同步电机双闭环控制系统仿真[J]. 河南科技, 2021, 40(5): 44-47. doi: 10.3969/j.issn.1003-5168.2021.05.019 [12] 何德峰, 张庆武, 祁飞, 等. 基于传递函数估计的闭环PID参数自整定[J]. 化工自动化及仪表, 2006, 33(2): 33-35. doi: 10.3969/j.issn.1000-3932.2006.02.008 [13] 张官亮. 伺服系统的参数化建模与仿真[D]. 西安: 西安电子科技大学, 2010. [14] 张艳菊, 符远翔, 车丹. 激光跟踪仪在工业机器人位姿特性检测中的应用[J]. 机床与液压, 2018, 46(21): 29-33,14. doi: 10.3969/j.issn.1001-3881.2018.21.007 [15] 吴卫国, 陈辉堂, 王月娟. 移动机器人的全局轨迹跟踪控制[J]. 自动化学报, 2001(3): 326-331. doi: 10.16383/j.aas.2001.03.006 [16] Xia B, Wang K, Xu A, et al. Intelligent fault diagnosis for bearings of industrial robot joints under varying working conditions based on deep adversarial domain adaptation[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 1-13. [17] 何卫东, 李力行, 李欣. 机器人用高精度RV减速器中摆线轮的优化新齿形[J]. 机械工程学报, 2000, 36(3): 51-55. doi: 10.3321/j.issn:0577-6686.2000.03.012 [18] 林逢春, 王前程, 陈云霞, 等. 基于伪寿命的加速退化机理一致性边界检验[J]. 北京航空航天大学学报, 2012, 38(2): 233-238. doi: 10.13700/j.bh.1001-5965.2012.02.012 [19] 陆博. 基于加速退化试验的RV减速器寿命预测方法[D]. 哈尔滨: 哈尔滨理工大学, 2017. [20] Chen W H, Liu J, Gao L, et al. Step-stress accelerated degradation test modeling and statistical analysis methods[J]. Chinese Journal of Mechanical Engineering, 2013, 26(6): 1154-1159. doi: 10.3901/CJME.2013.06.1154 [21] 黄亚军. 利用绝缘电阻的变化来预测和延长电机寿命[J]. 电工技术杂志, 1994(3): 26-29. [22] 周学正. 振动对工业机器人运动精度影响初探[J]. 水利电力机械电子技术, 1990, 4(1): 1-8,55. [23] 郑鹏. 机床加工过程振动特性及对加工表面质量影响的研究[D]. 武汉: 华中科技大学, 2012. [24] 齐琦. 基于Wiener过程的退化数据建模与研究[D]. 西安: 西安电子科技大学, 2019. -

 下载:
下载:




 点击查看大图
点击查看大图
图(12) / 表(6)
计量
- 文章访问数: 124
- HTML全文浏览量: 20
- PDF下载量: 183
- 被引次数: 0


