

Station optimization design of an aircraft wing robot spraying system
-
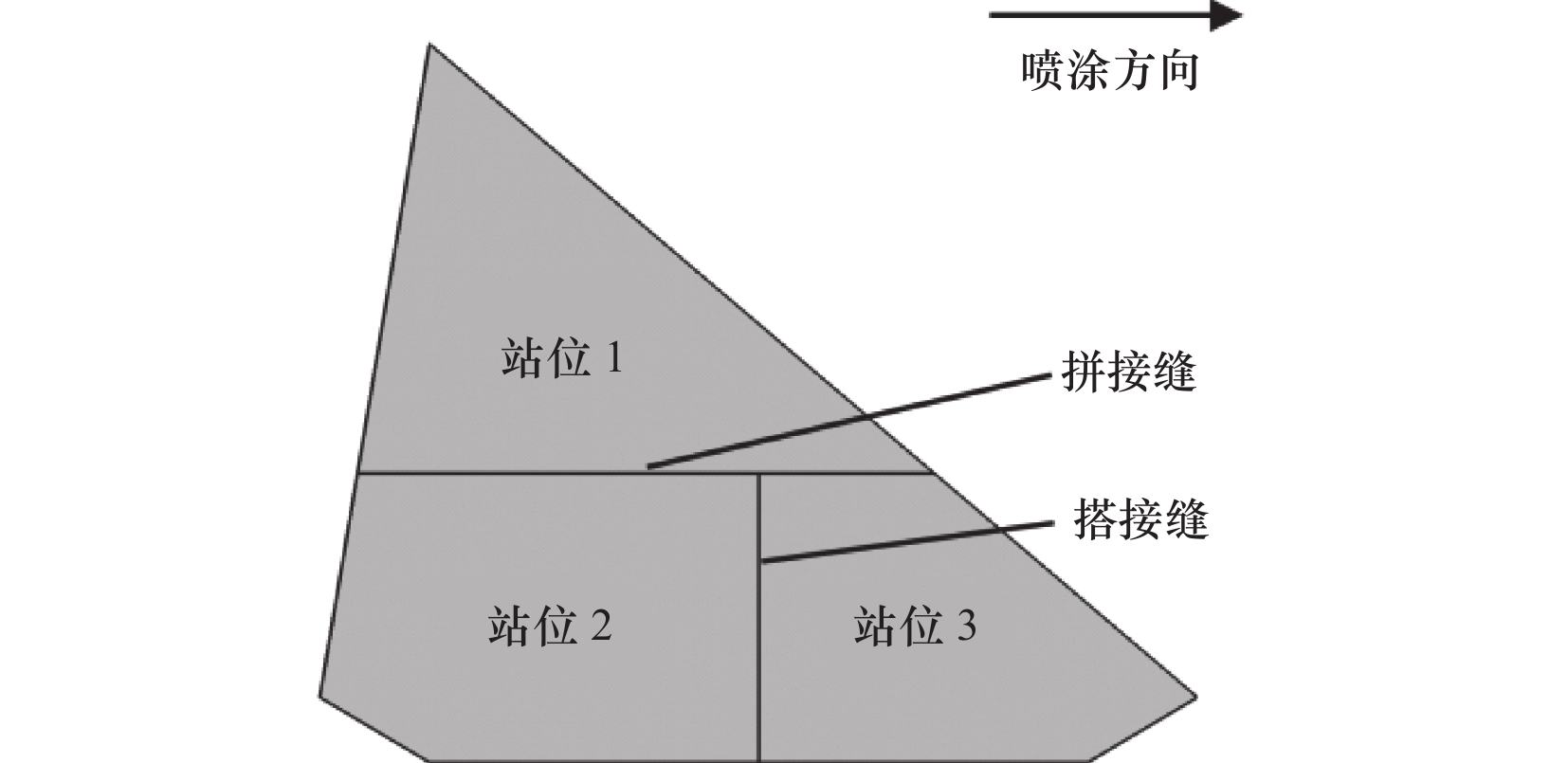
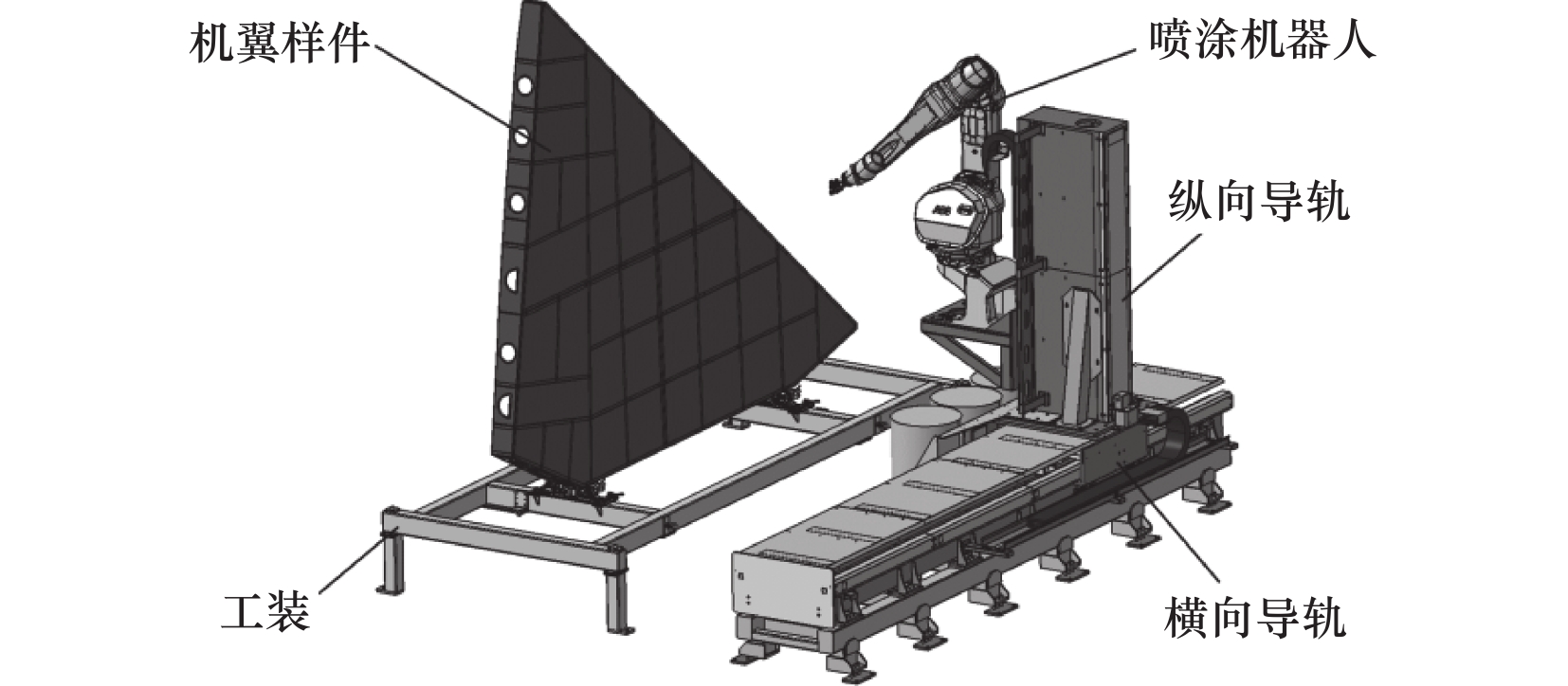
摘要: 面向飞机大部件喷涂作业时,机器人若采用固定式站位实现喷涂作业,此时在不同站位的喷涂区域间将形成拼接和搭接区域。由于搭接区域的喷涂质量难以控制,文章就一种飞机机翼机器人喷涂系统的站位优化设计进行了研究。为尽可能减少搭接缝的形成,提升机翼部件整体喷涂质量,提出了站位优化设计方案,为飞机大部件喷涂的站位设计提供思路及方法。Abstract: For the spraying operation of large parts of aircraft, the robot adopts fixed stations to realize the spraying operation. At this time, splicing and overlapping areas will be formed between the spraying areas of different stations. The spraying quality in the overlapping area is difficult to control, so the station optimization design of an aircraft wing robot spraying system is studied in this paper.In order to reduce the overlapping areas as much as possible and improve the overall spraying quality of the wing, the station optimization design scheme is put forward, which provides ideas and methods for the station optimization design of spraying large parts of the aircraft.
-
Key words:
- robot /
- spraying /
- station optimization
-
[1] 邵秋萍, 刘极峰, 王孜凌. 基于外部轴控制的塞拉门机器人弧焊工作站[J]. 机械设计与制造, 2006(9): 117-119. doi: 10.3969/j.issn.1001-3997.2006.09.051 [2] 孙丽宏, 王伟. 离线编程与仿真技术在柔性导轨自动制孔系统中的应用[J]. 航空制造技术, 2011(13): 47-50. doi: 10.3969/j.issn.1671-833X.2011.13.006 [3] 黄进, 胡英, 马孜, 等. 基于粒子群优化算法的工业机器人与外部轴标定[J]. 机械工程学报, 2009, 45(7): 63-67. [4] 肖爽. 基于产品数模的机器人柔性装配系统任务规划方法与实现[D]. 南京: 南京航空航天大学, 2013. [5] 林巨广, 汤东华. DELMIA在机器人白车身点焊工作站规划设计中的应用[J]. 机械设计与制造, 2010(12): 90-92. doi: 10.3969/j.issn.1001-3997.2010.12.035 [6] 田威, 戴家隆, 周卫雪, 等. 附加外部轴的工业机器人自动钻铆系统分站式任务规划与控制技术[J]. 中国机械工程, 2014, 25(1): 23-27. doi: 10.3969/j.issn.1004-132X.2014.01.005 [7] 杜亮, 张铁. 工业机器人连续轨迹位置规划算法的研究[J]. 装备制造技术, 2006(5): 29-31. [8] 张红强. 工业机器人时间最优轨迹规划[D]. 长沙: 湖南大学, 2004. [9] 孟国军. 工业机器人离线编程系统关键技术的研究[D]. 武汉:华中科技大学, 2011. [10] 赵葛霄, 邹仁海, 陈广成, 等. 工业机器人离线编程及无碰撞路径规划系统的开发研究[J]. 组合机床与自动化加工技术, 2000(6): 17-18. doi: 10.3969/j.issn.1001-2265.2000.06.007 -

 下载:
下载:


 点击查看大图
点击查看大图
图(9)
计量
- 文章访问数: 54
- HTML全文浏览量: 13
- PDF下载量: 25
- 被引次数: 0


