

Research on adaptive neural fuzzy control of controllable excitation linear synchronous motor
-
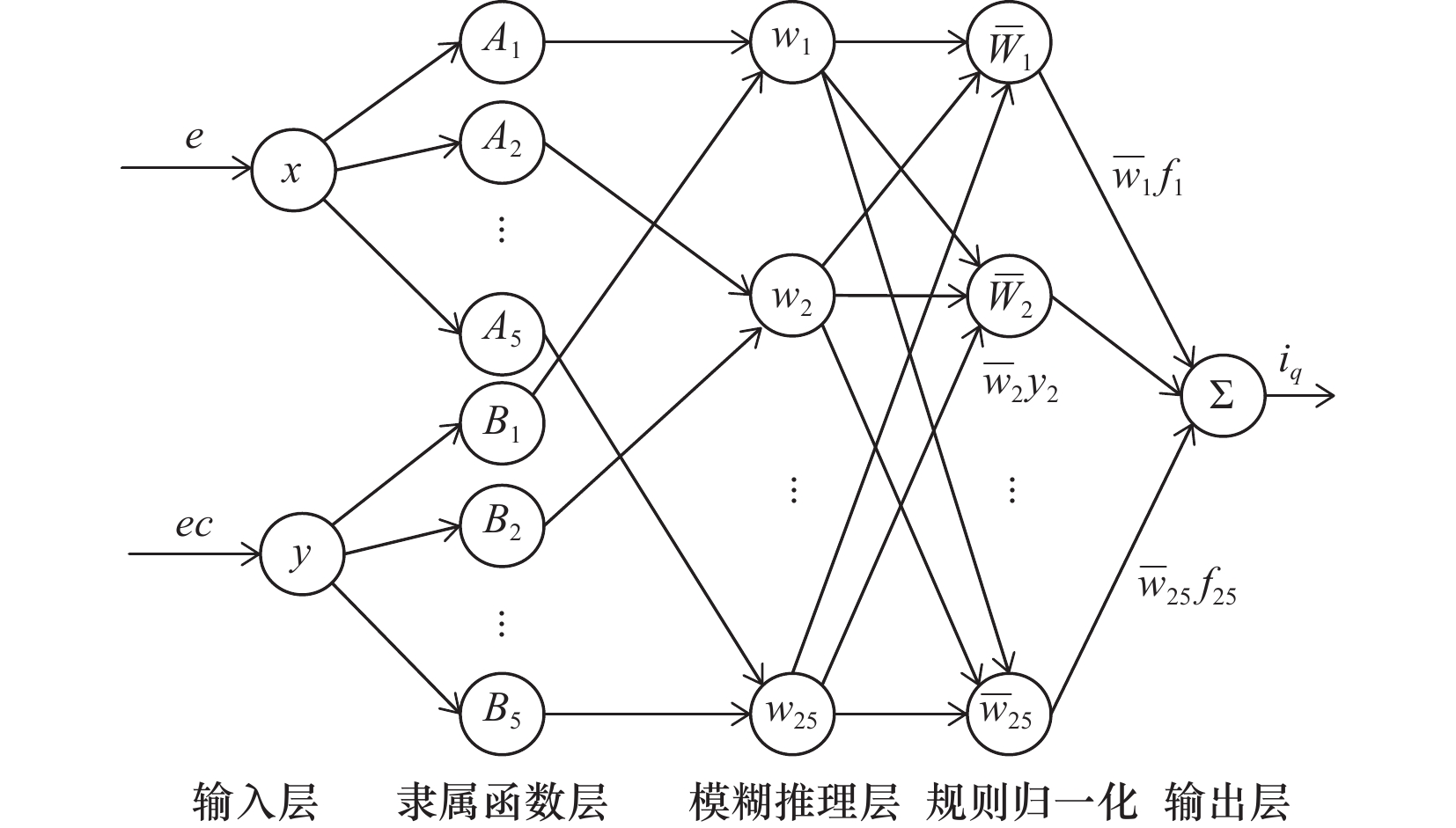
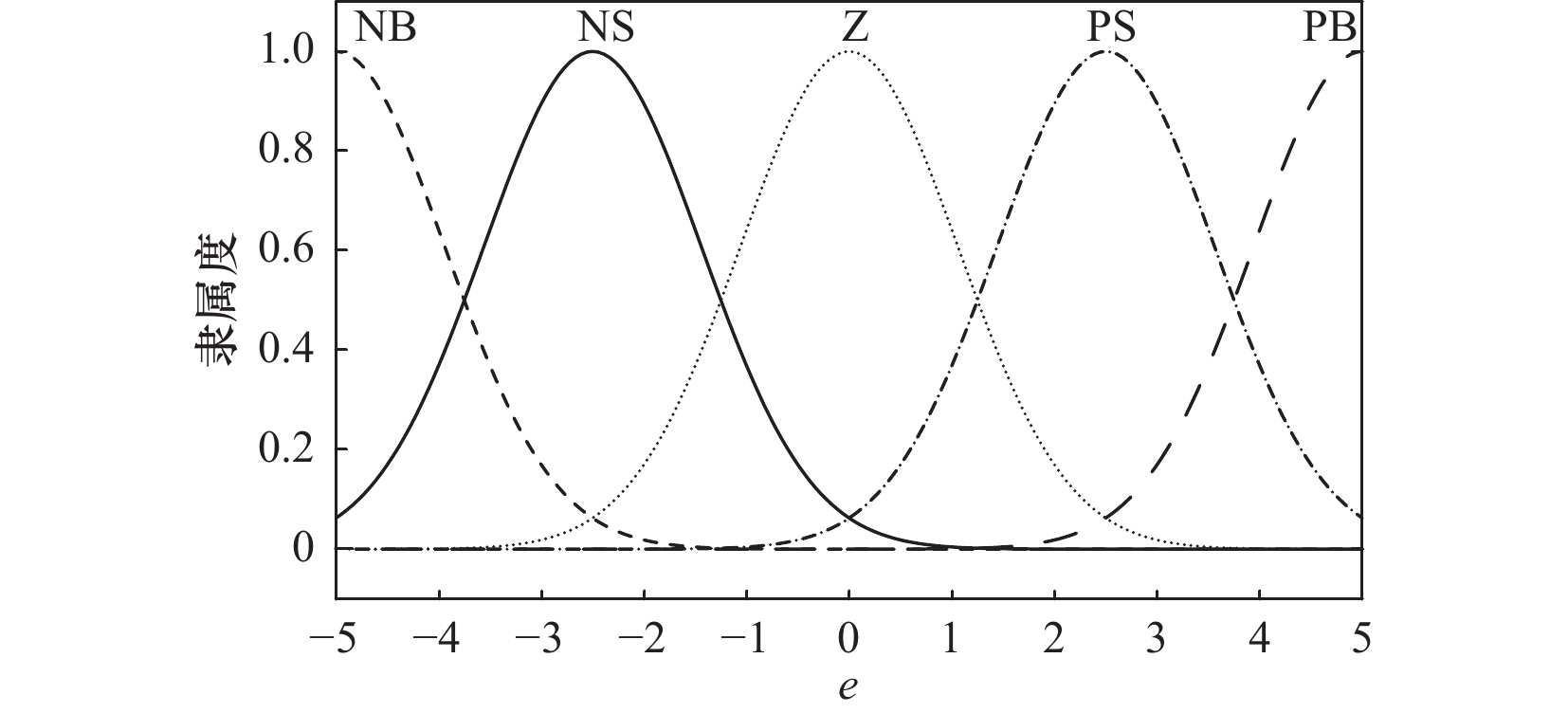
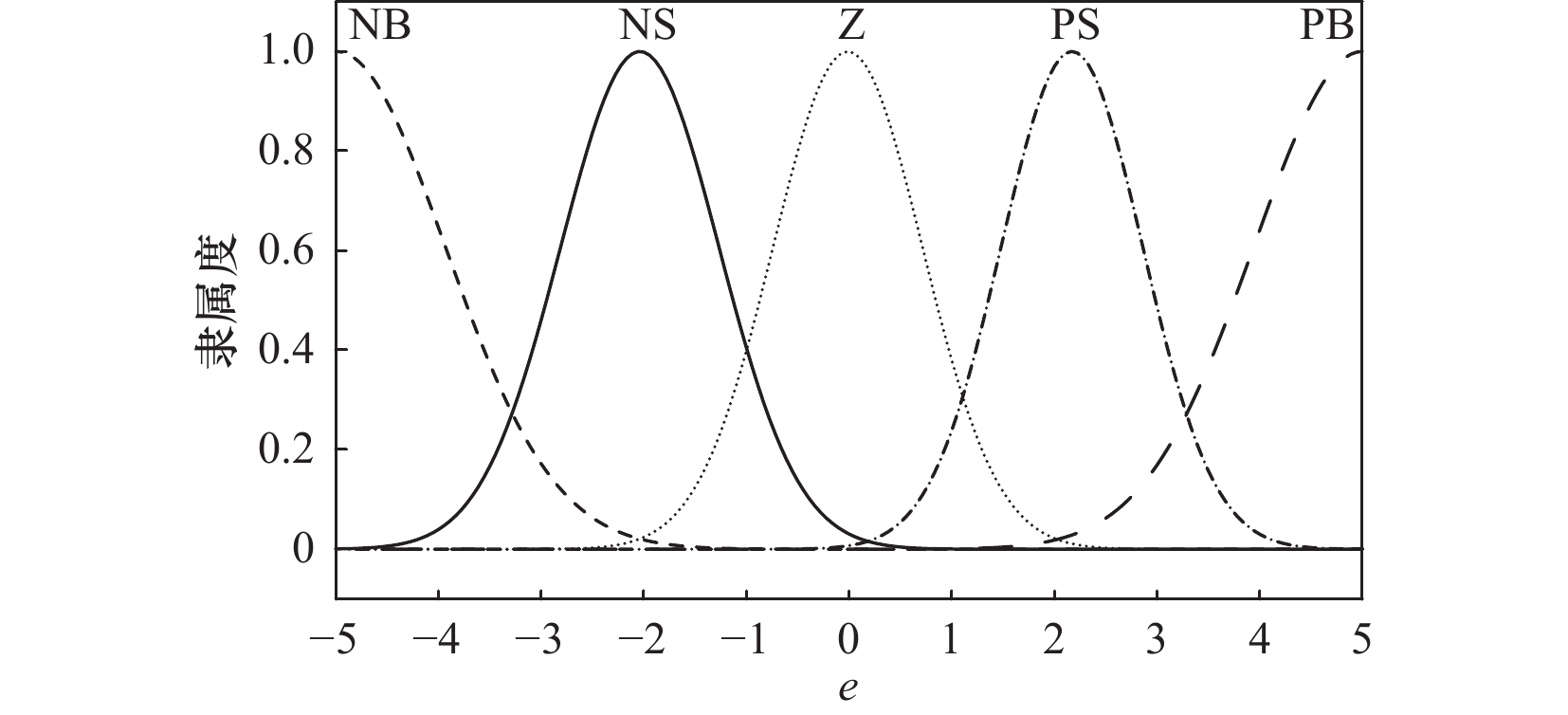
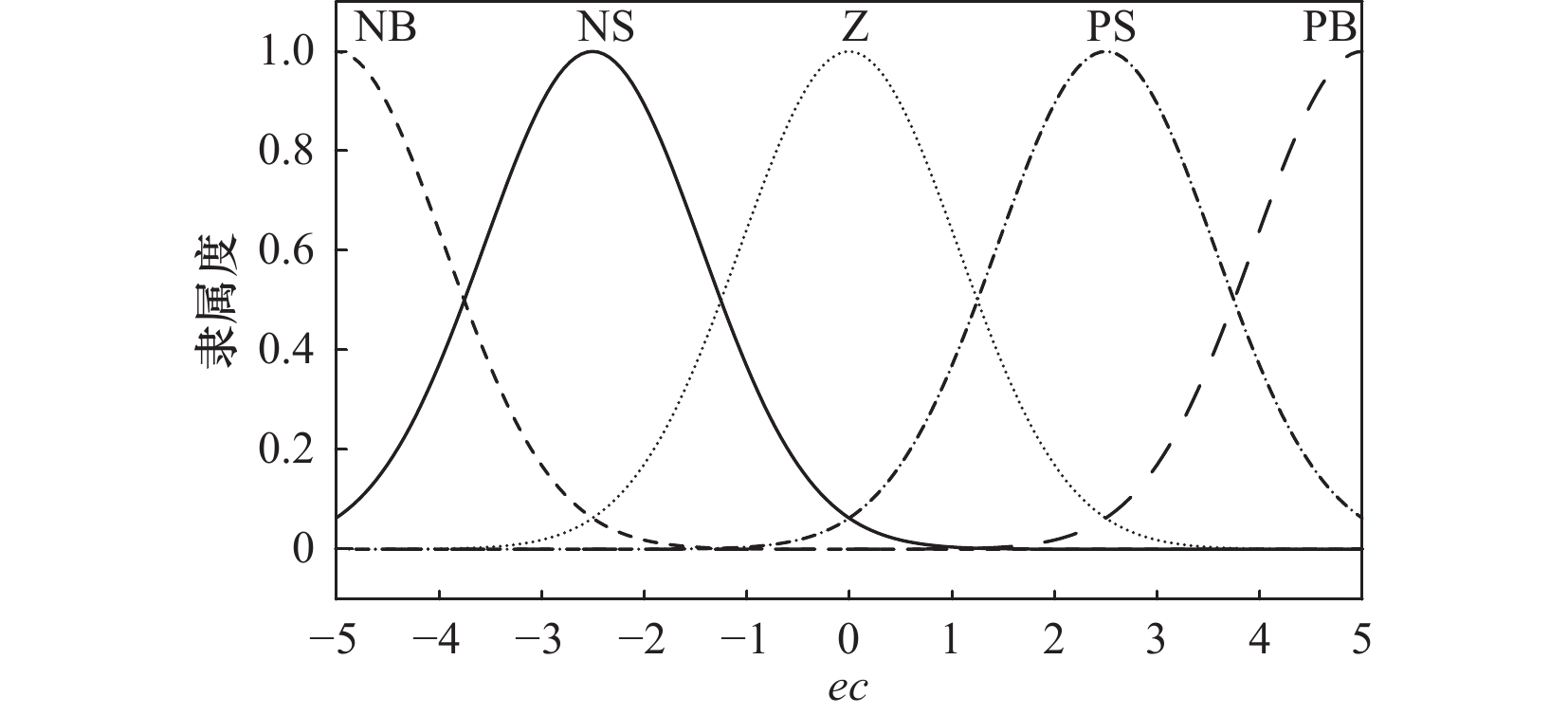
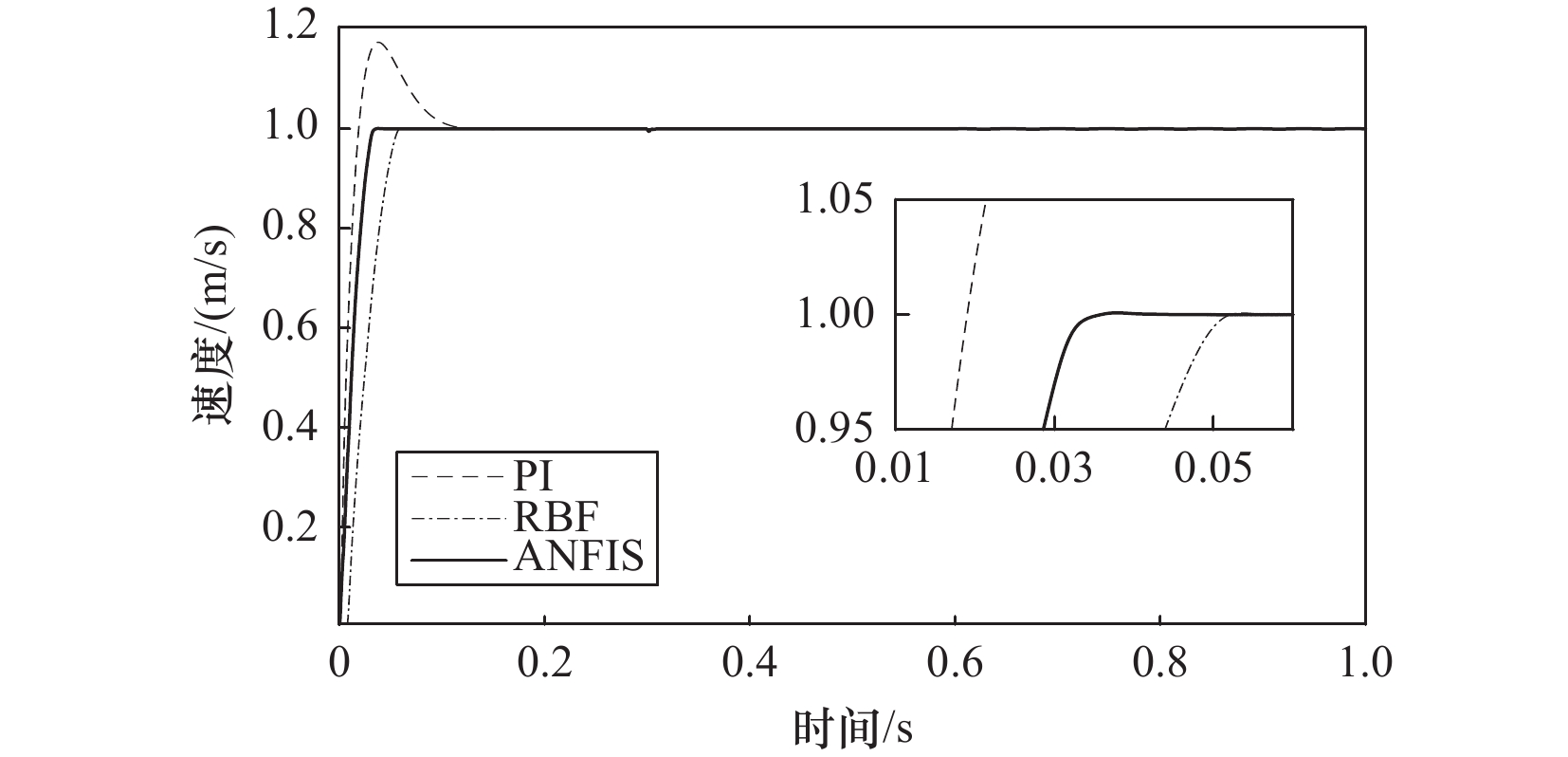
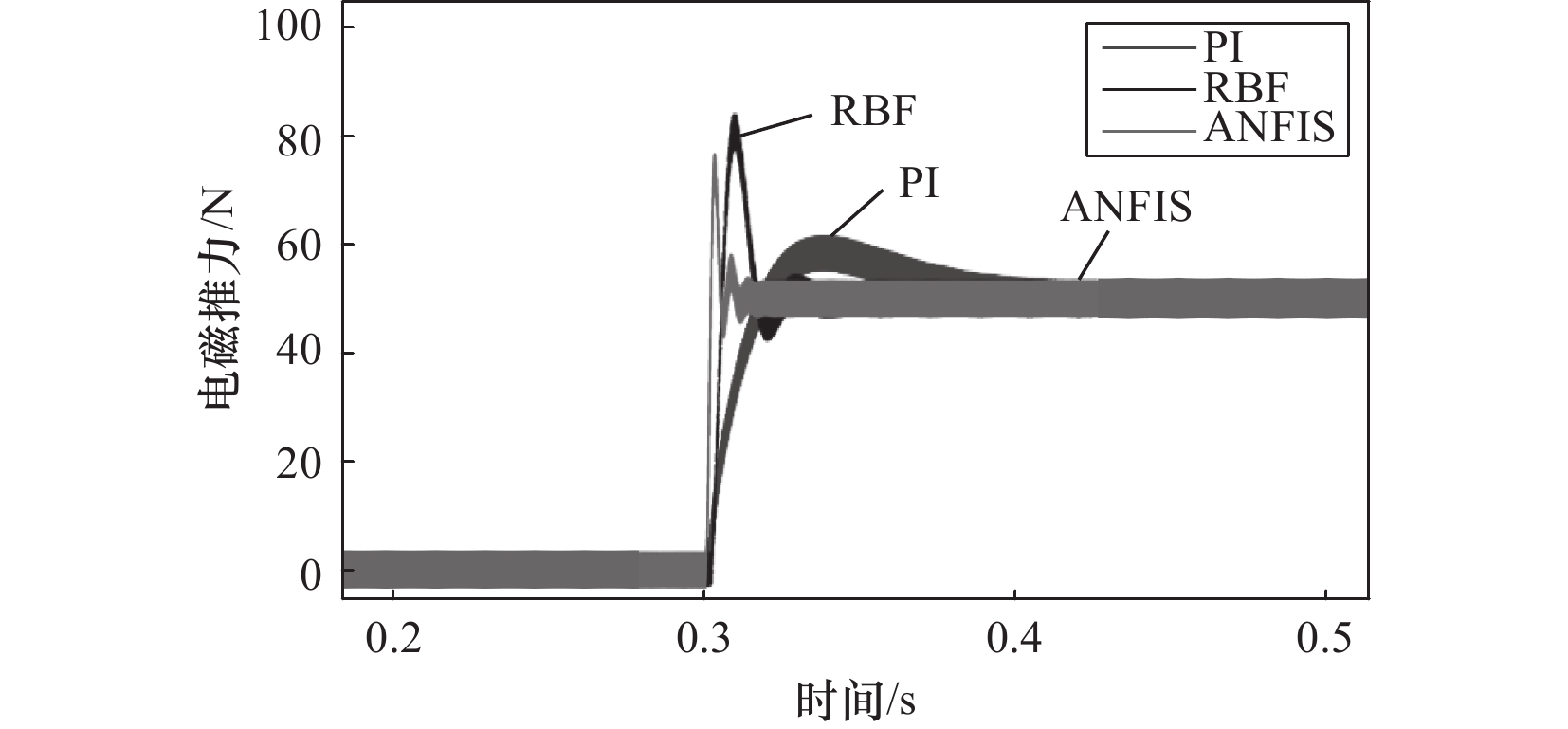
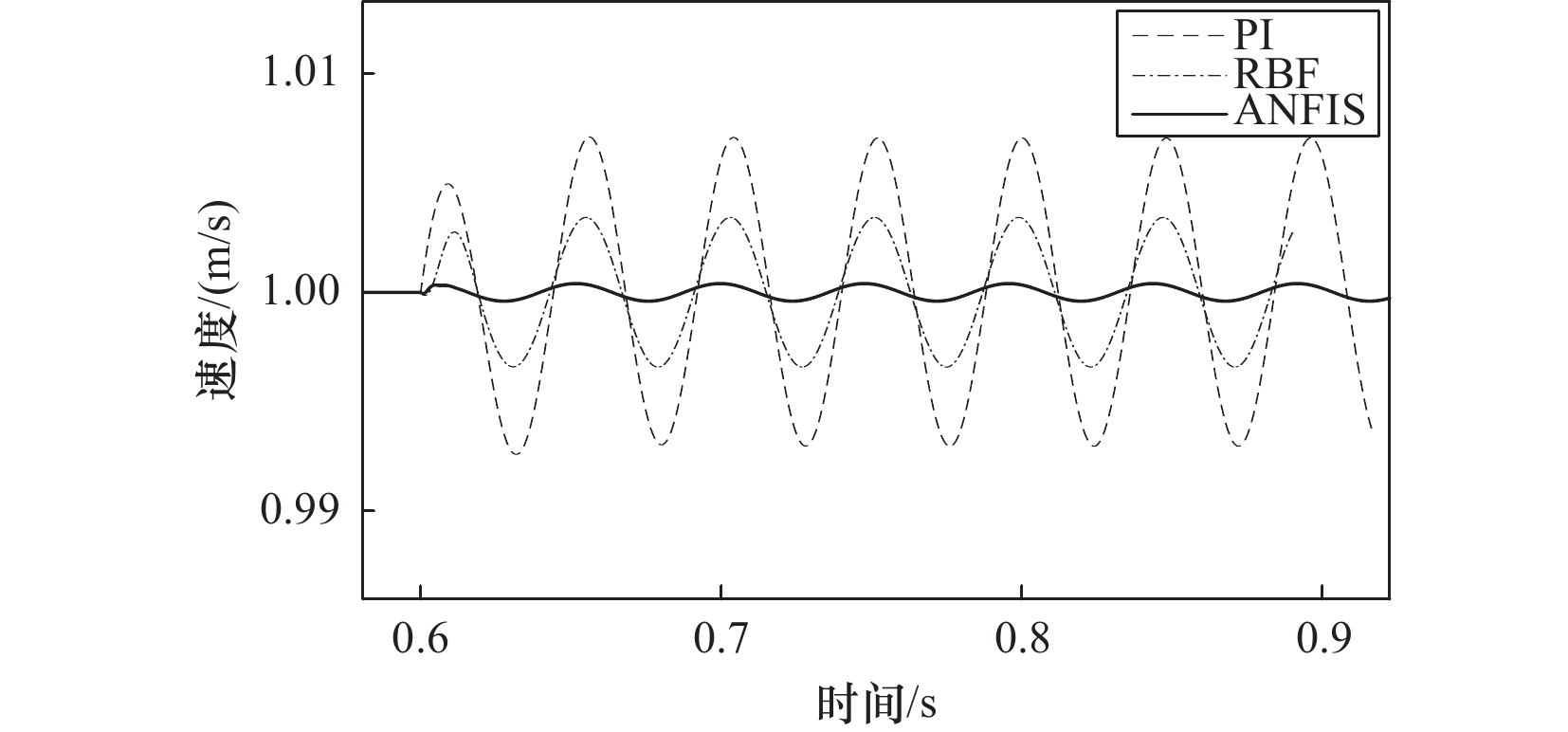
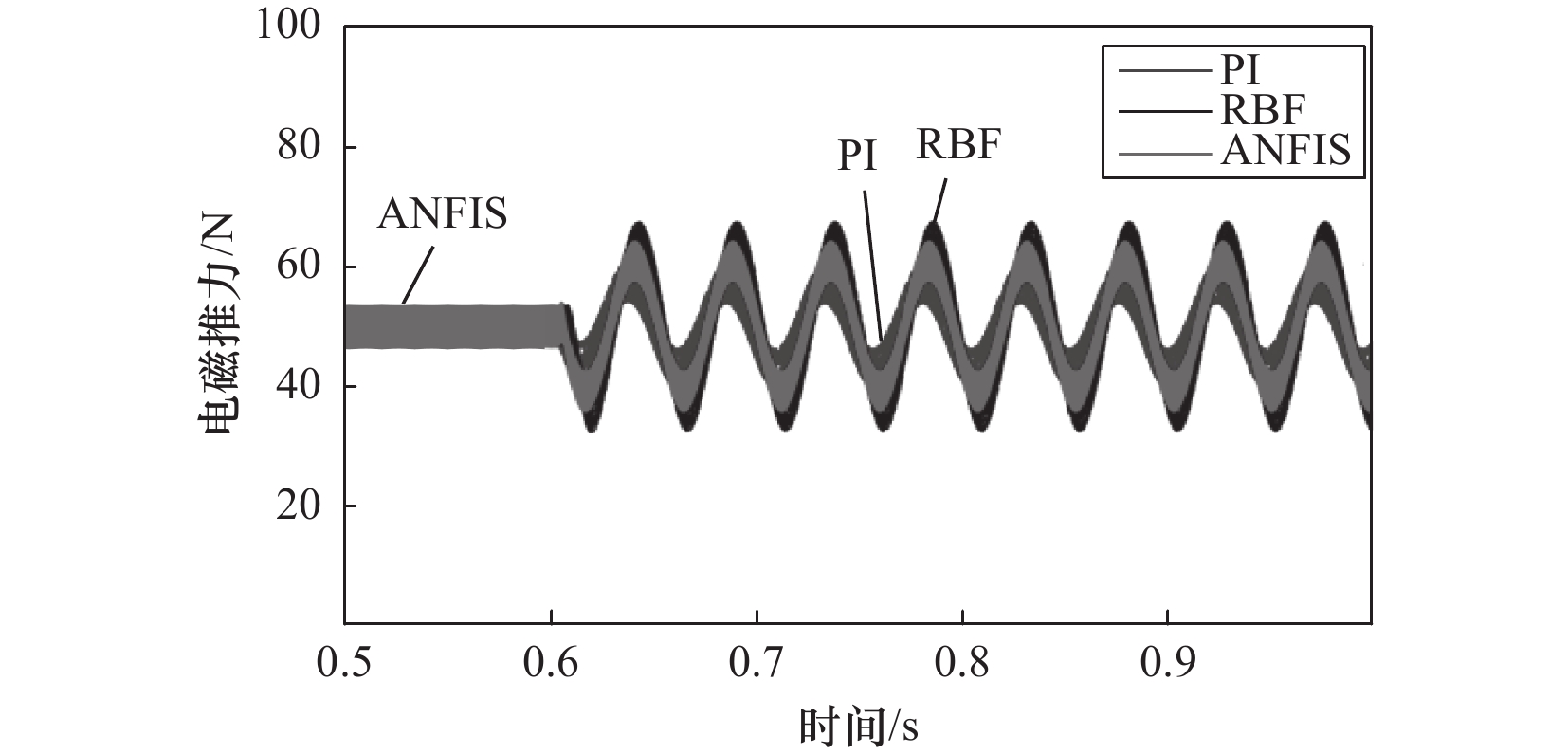
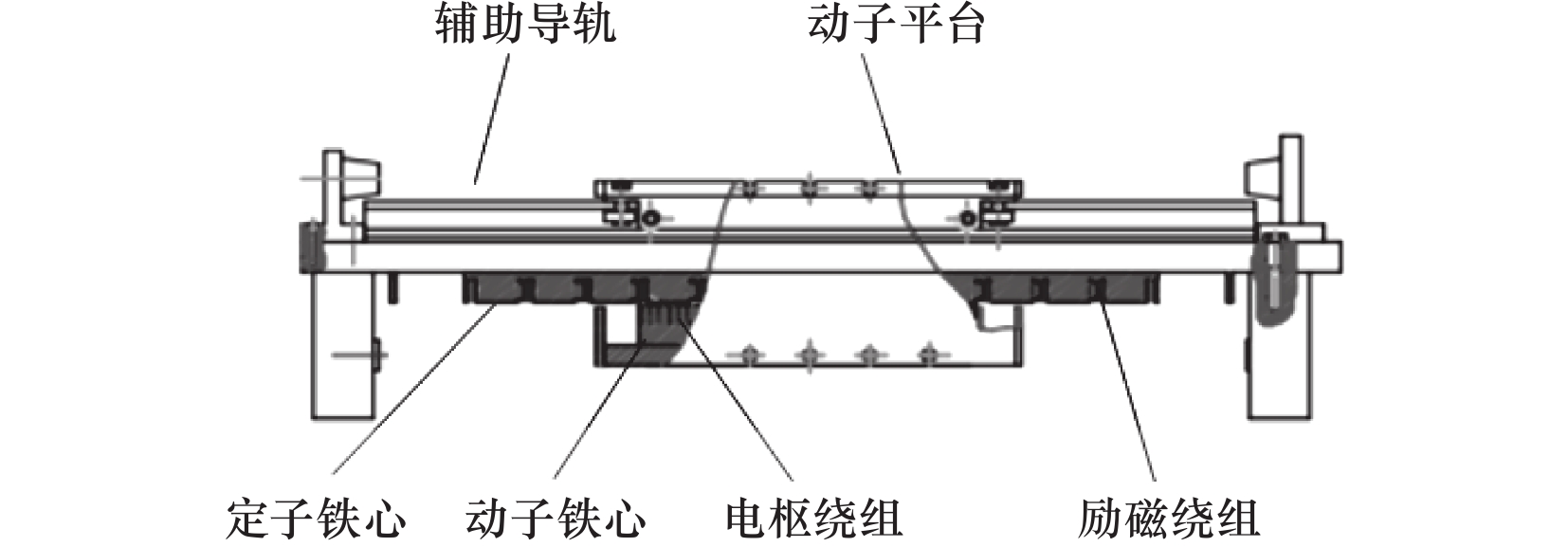
摘要: 由于可控励磁直线同步电动机(controllable excitation linear synchronous motor, CELSM)运行中存在不确定性扰动的问题,设计了一种基于自适应神经模糊推理(adaptive neuro-fuzzy inference system,ANFIS)的控制系统。根据CELSM的特定结构和运行原理,推导电压方程、电磁推力方程以及运动方程的数学模型;由于CELSM的数学模型具有扰动的不确定性,采用模糊控制有很强的针对性,而传统模糊控制隶属度函数和控制规则难以自动调整,自适应神经模糊控制器能够根据所选误差函数利用样本集采用混合学习算法训练模糊推理系统(fuzzy inference system, FIS),在线调整隶属度函数参数,以及实现模糊规则的自动获取;利用MATLAB软件建模仿真,与RBF神经网络控制、PI控制对比,结果表明ANFIS控制稳定性好,精度高,系统响应速度快,抗干扰能力强且具有很强的自适应性。Abstract: Controllable linear synchronous motor (CELSM) has a problem when operating. A control system based on adaptive neuro-fuzzy inference system (ANFIS) is designed. According to the specific structure and operation principle of CELSM, the mathematical models of voltage equation, electromagnetic thrust equation and motion equation are derived. Since the mathematical model of CELSM has disturbance uncertainty, and fuzzy control is adopted because of its strong pertinence. The membership function and control rules of traditional fuzzy control are difficult to be adjusted automatically. fuzzy inference system (FIS) can be trained by adaptive neural fuzzy controller using sample set according to the selected error function. The hybrid learning algorithm is used in the training. The parameters of membership function are adjusted online and the automatic acquisition of fuzzy rules is realized. Using MATLAB software modeling and simulation, compared with RBF neural network control and PI control, the results show that ANFIS control has good stability, high precision, fast response speed, strong anti-interference ability and strong adaptability.
-
表 1 ANFIS参数设置
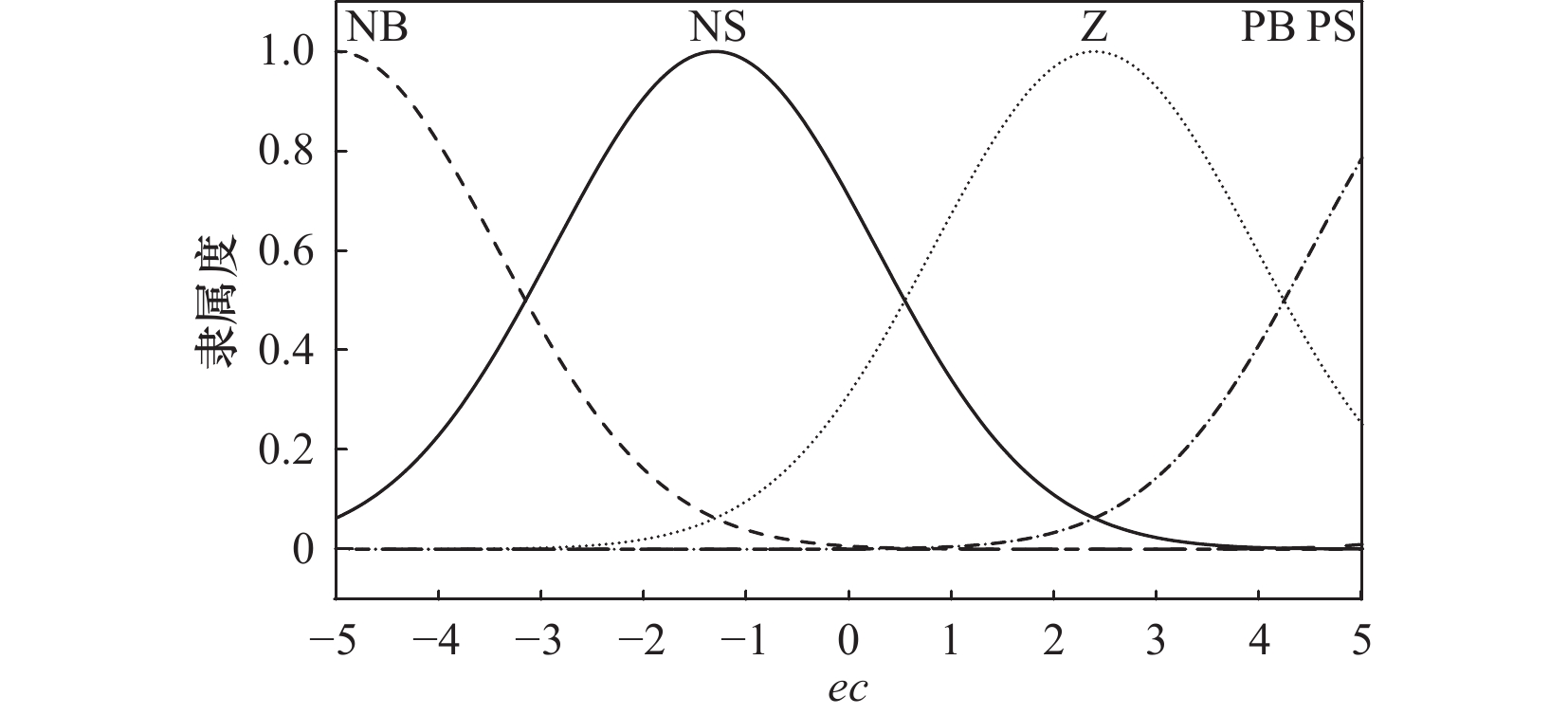
参数 算法/数据 学习算法 最小二乘法和误差反向传播算法 学习速率 0.1 训练次数 10 各层神经元数 2 10 25 25 1 隶属度函数个数 5 隶属度函数类型 高斯型函数  下载: 导出CSV
下载: 导出CSV
-
[1] 郭亮, 邓乾坤, 鲁文其, 等. 高精度数控机床直线电机的改进型自抗扰控制研究[J]. 机电工程, 2019, 36(12): 1303-1308. doi: 10.3969/j.issn.1001-4551.2019.12.014 [2] 蓝益鹏, 姚婉婷, 杨文康, 等. 数控机床直线同步电动机磁悬浮系统的神经网络直接自适应控制[J]. 机械工程学报, 2021, 57(17): 236-242. [3] 石振新, 冯剑波, 王衍学. 基于ANFIS及MPC的车辆转向换道控制系统设计[J]. 现代制造工程, 2022(2): 70-78. doi: 10.16731/j.cnki.1671-3133.2022.02.011 [4] 蒋沅, 公成龙, 吕科, 等. 基于自适应模糊补偿的不确定性机器人CNF控制[J]. 振动与冲击, 2020, 39(8): 106-111. doi: 10.13465/j.cnki.jvs.2020.08.015 [5] Liu Y J, Zhao W, Liu L, et al. Adaptive neural network control for a class of nonlinear systems with function constraints on states[J]. IEEE Transactions on Neural Networks and Learning Systems, 2021: 1-10. [6] Sahoo S, Subudhi B, Panda G. Torque and pitch angle control of a wind turbine using multiple adaptive neuro-fuzzy control[J]. Wind Engineering, 2020, 44(2): 125-141. doi: 10.1177/0309524X19849825 [7] Rao J J, Li B, Zhang Z, et al. Position control of quadrotor uav based on cascade fuzzy neural network[J]. Energies, 2022, 15(5): 1763-1763. doi: 10.3390/en15051763 [8] Precup R E, David R C, Petriu E M. Grey wolf optimizer algorithm-based tuning of fuzzy control systems with reduced parametric sensitivity[J]. IEEE Transactions on Industrial Electronics, 2017, 64(1): 527-534. doi: 10.1109/TIE.2016.2607698 [9] 陈琪, 刘刚, 郑世强. 基于自适应变步长最小均方差算法的磁悬浮电动机自动平衡方法[J]. 机械工程学报, 2015, 51(15): 119-127. [10] Tong Q Q, Li X S, Lin K, et al. Cascade lstm based visual-inertial navigation for magnetic levitation haptic interaction[J]. IEEE Network, 2019, 33(3): 74-80. doi: 10.1109/MNET.2019.1800371 [11] 蓝益鹏, 王靖腾. 可控励磁直线同步电动机滑模控制的研究[J]. 制造技术与机床, 2018(11): 60-65. doi: 10.19287/j.cnki.1005-2402.2018.11.008 [12] 于希宁, 程锋章, 朱丽玲, 等. 基于T-S模型的自适应神经模糊推理系统及其在热工过程建模中的应用[J]. 中国电机工程学报, 2006(15): 78-82. doi: 10.3321/j.issn:0258-8013.2006.15.015 [13] 张会林, 金玉洁, 杨海马. ANFIS优化磁链滑模观测器的PMSM无传感器控制[J/OL]. 系统仿真学报, 2022 (4): 1-10. [14] 王海燕, 王林. 基于自适应神经模糊推理控制的无刷直流电机转子位置控制研究[J]. 机床与液压, 2020, 48(1): 41-44. doi: 10.3969/j.issn.1001-3881.2020.01.009 -

 下载:
下载:





 点击查看大图
点击查看大图
图(15) / 表(1)
计量
- 文章访问数: 55
- HTML全文浏览量: 3
- PDF下载量: 13
- 被引次数: 0


